CPP2157620_SMT_Programming_C程序编辑手册.pdf - 第315页
A-43 8: 屏蔽元件 适用于屏蔽元件。按正确方向放置元件时,水平、垂直直线的倾斜 ( 下图 a 〜 h 的平均角度 ) 作为元件的角度,该角度的 外接矩形 ( 下图 A) 作为元件中心。外形轮廓的大半由水平、垂直的直线构成,并且构成元件的轮廓必须全部相连接。 特殊长方形 8: 屏蔽元件 元件例 N S E W N S E W 仰视图 元件中心 a b c d e f h g A 25742-P0-00 自动 2 值化的…
A-42
■ 特殊长方形
3: 方向判定
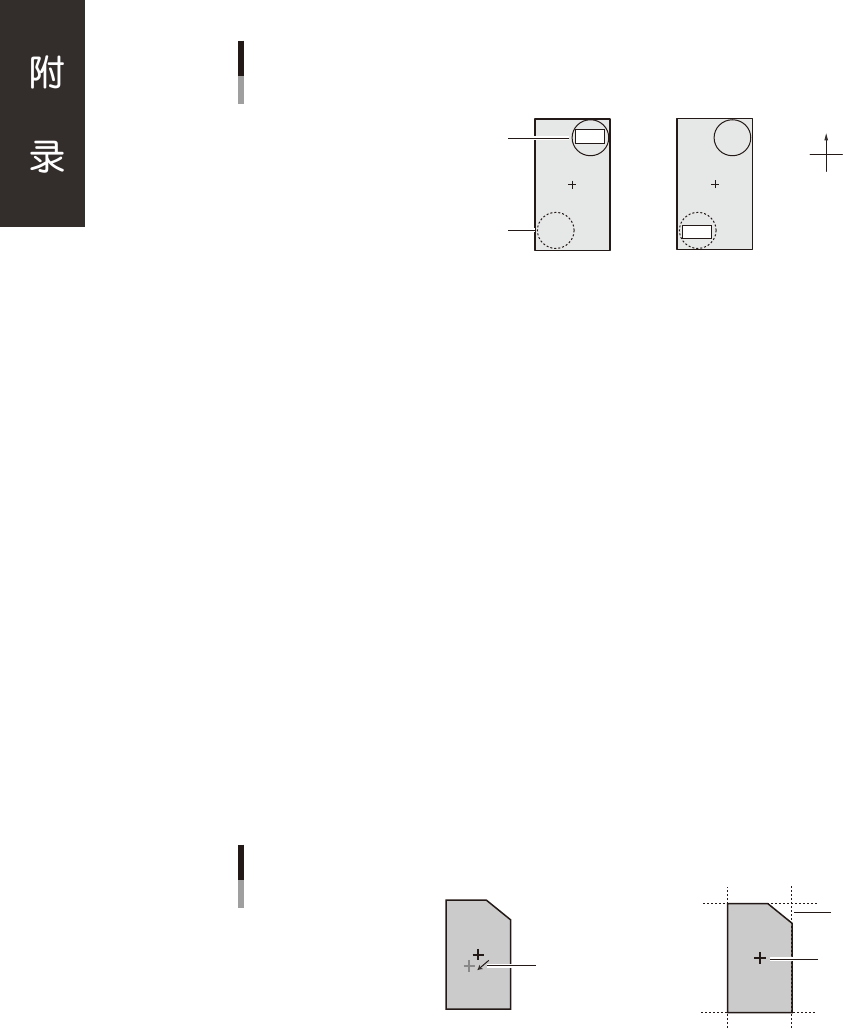
适用于判定矩形元件的方向。以圆 ( 以下称“检测圆”) 指定测量亮度的范围,比较该圆区域与 180 度相对方向的圆区域
( 旋转对称位置 ) 的平均亮度,判定方向。识别面有标示极性的标记等时可以使用。
特殊长方形
3: 方向判定 元件例(仰视图)
N
S
EW
0˚ +180˚
亮度测量范围
(检测圆)
旋转对称位置
25741-P0-00
检查对象
检测圆的亮度,比旋转对称位置的圆区域的亮度亮时,指定为“白”;暗时指定为“黑”。
检测角度
指定使元件旋转多少度后判定方向。
2 种角度
想要使元件旋转 0 度、180 度后判定时指定。
4 种角度
想要使元件旋转 0 度、90 度、180 度、270 度后判定时指定。
最小亮度差
检测圆区域与旋转对称位置的圆区域的最小对比度,可以在 0 〜 255 的范围内设置。一般,设置为 0。
检测圆区域的平均亮度与旋转对称位置的圆区域的平均亮度差小于在此所设定的值时,会发生错误。
元件中心检测方法
指定元件中心位置的计算方法。
重心
以检出的轮廓重心为元件的中心位置。
各边直线矩形中心
在元件的各边划上直线连接成矩形,此矩形的中心为元件的中心位置。
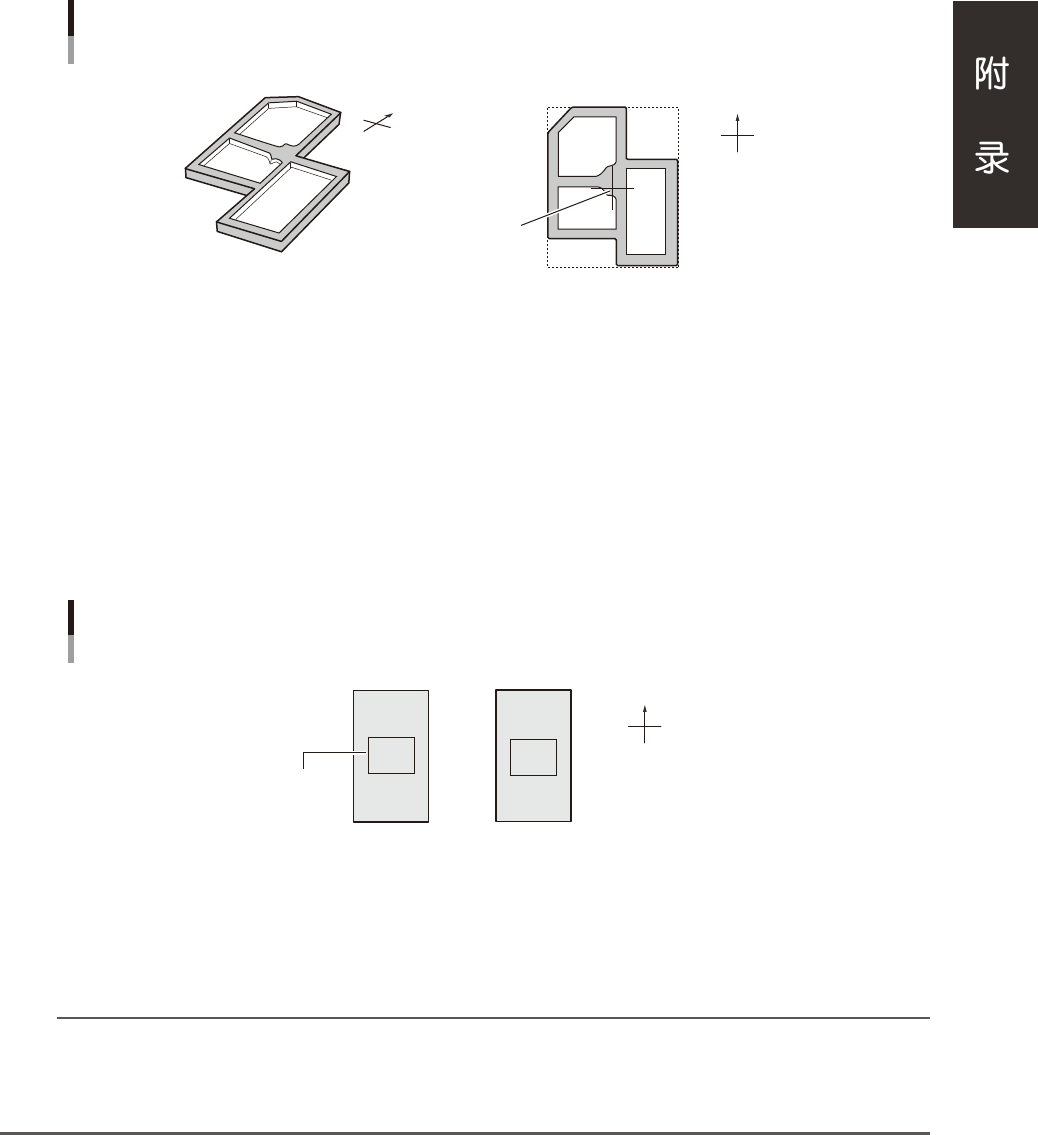
以下图所示的元件为例,设置为“重心”时,受元件缺少部分的影响,中心可能会偏移。此时使用此方法会很有效。
各边直线矩形中心
中心偏移
在各边划出直线,
构成矩形。
矩形中心=元件中心,
因此中心不会偏移。
NG
OK
25746-P0-00
自动 2 值化的方法
指定“识别”参数的“J.元件界限值”设置为 0 时的 2 值化方法。
明暗辨别
自动算出使黑白最为分明的界限值。端子部和载体部的明暗差 ( 对比度 ) 明显时使用。
面积基准
决定界限值,使作为端子所设置的面积显示为白色。除端子以外没有其它反光物时,可以使用。
检测圆直径 (mm)
指定检测圆的直径。
检测圆中心位置 X、Y
指定检测圆的中心位置。输入元件中心到检测圆的中心的距离。
A-43
8: 屏蔽元件
适用于屏蔽元件。按正确方向放置元件时,水平、垂直直线的倾斜 ( 下图 a 〜 h 的平均角度 ) 作为元件的角度,该角度的
外接矩形 ( 下图 A) 作为元件中心。外形轮廓的大半由水平、垂直的直线构成,并且构成元件的轮廓必须全部相连接。
特殊长方形
8: 屏蔽元件 元件例
N
S
EW
N
S
E
W
仰视图
元件中心
a
b
c
d
e
f
h
g
A
25742-P0-00
自动 2 值化的方法
指定“识别”参数的“J.元件界限值”设置为 0」时的 2 值化方法。
明暗辨别
自动算出使黑白最为分明的界限值。端子部和载体部的明暗差 ( 对比度 ) 明显时使用。
面积基准
决定界限值,使作为端子所设置的面积显示为白色。除端子以外没有其它反光物时,可以使用。
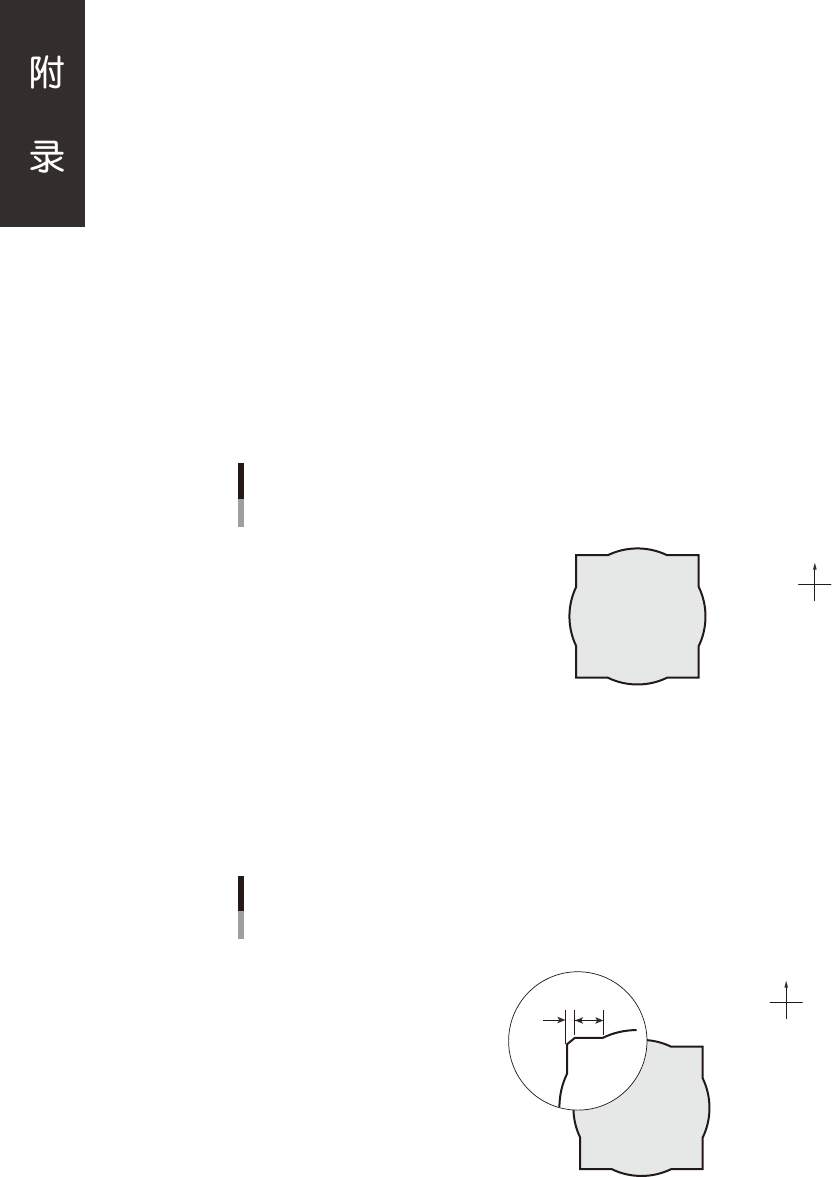
10: 正反面判定
适用于判定矩形元件的正反面。以矩形 ( 以下称“判定区域”) 指定测量亮度的范围,通过检查该区域的亮度偏差 ( 分散 ),
判定元件的正反面。
A
特殊长方形
10: 正反面判定 元件例(仰视图)
N
S
EW
OK NG
判定区域
25743-P0-00
判定用 3σ 界限值
设置判定用亮度偏差 (3σ) 的界限值。比较此处所指定的值与判定区域内的亮度偏差。
判定用平均亮度界限值
一般设置为 0。
参考
一般设置为 0,但有时设置 0 以外的值可以防止过度判定。设置为 0 以外的值时,如果在下列条件,会发生识别错误。
1. “NG 判定条件”参数的设置为“分散”。
2. 判定区域内的亮度偏差超过了在“判定用 3σ 界限值”参数中指定的值。
3. 判定区域内的平均亮度超过了此处所指定的值。
元件中心检测方法
详细内容,参照前述算法“3:方向判定”。
判定区域偏移有效
设置是否使判定区域偏移。
‧
有 效
按照在判定区域偏移量 X、Y 中指定的值移动判定区域。
‧
无 效
在元件中央部设置判定区域。
A-44
NG 判定条件
指定判定为不良的条件。
‧
分 散
测量值大于在“判定用 3σ 界限值”参数中指定的界限值时,判定为错误。
‧
不分散
测量值小于在“判定用 3σ 界限值”参数中指定的界限值时,判定为错误。
自动 2 值化的方法
指定“识别”参数的“J.元件界限值”设置为 0 时的 2 值化方法。
明暗辨别
自动算出使黑白最为分明的界限值。端子部和载体部的明暗差 ( 对比度 ) 明显时使用。
面积基准
决定界限值,使作为端子所设置的面积显示为白色。除端子以外没有其它反光物时,可以使用。
判定区域尺寸 X、Y
指定判定区域的尺寸。通过元件调整功能确认元件后输入数值。
判定区域偏移量 X、判定区域偏移量 Y
指定判定区域的偏移量。输入从元件中心到判定区域 ( 矩形 ) 中心的距离。
此处输入的值,在“判定区域偏移有效”参数设置为“有效”时使用。
11: 4 角基准识别
使用 4 个角附近的直线,对近似矩形的元件进行定位时使用。
特殊长方形
11: 4角基准识别 元件例
N
S
EW
仰视图
25744-P0-00
边缘检测开始位置 (mm)
指定从矩形部的端面到可确保精度的直线的距离 ( 如下图 A)。
边缘检测宽度 (mm)
指定可确保精度的直线部分的长度 ( 如下图 B)。
特殊长方形
边缘检测开始位置、边缘检测宽度 元件例
N
S
EW
A B
25745-P0-00
矩形尺寸 X、Y(mm)
指定矩形部分的尺寸。