CPP2157620_SMT_Programming_C程序编辑手册.pdf - 第81页
2-31 2 E: 吸附角度 · 输入贴装头在送料器上方吸附元件时的旋转角度。此设置决定识别元件时的元件方向 ( 识别基准 )。 一般,元件包装外形横方向长时设置为 0 度 ; 竖方向长时设置为 90 度。 · 设置晶体管的吸附角度时, 必须使引脚对着 NS 方向设置, 因此元件包装外形竖方向长 ( 封装部的竖方向 ) 时, 设置为 0 度; 横方向长时设置为 90 度。参考下表输入正确的吸附角度。 · 设置 SOP 的…
2-30
2
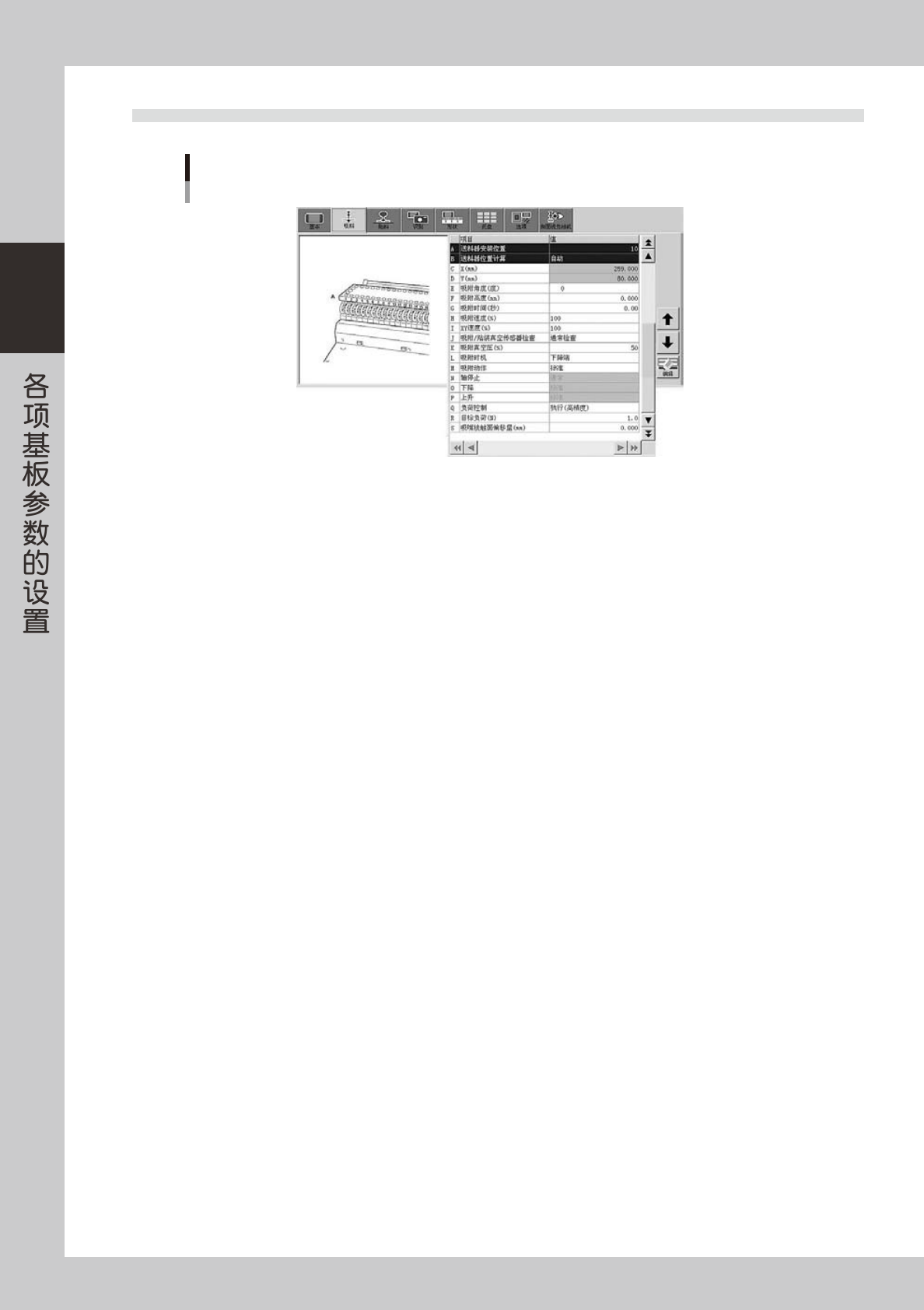
2.3 吸料参数
吸料参数
以Z:LEX(YSM20) FM贴装头机型为例
26212-P2-00
A: 送料器安装位置
输入安装送料器的送料器架的号码 ( 送料器定位销位置 )。
如果将 [ 元件 ]-“选项”选项卡画面的“优化”设置为“执行”,则不需要设置送料器架号码。
使用固定托盘式送料器供给元件时,输入距离该送料器安装位置最近的送料器架号码。
如果配备了自动、外接式托盘交换器等托盘装置时,可以直接使用默认值。
B: 送料器位置计算
如果元件的供给形态为“带式”,可设置为“自动”( 自动计算吸附位置 )。
如果使用杆式送料器或托盘式送料器供给元件,可设置为“示教”,参照第 3 章“1.带式送料器以外的供料装置”。
C、D: X、Y ( 吸附位置 )
输入贴装头吸附元件时的坐标值。
当“送料器位置计算”设置为“自动”时,此项目被跳过。
使用杆式送料器或托盘式送料器时,参照第 3 章“1.带式送料器以外的供料装置”,通过示教输入吸附位置。
2-31
2
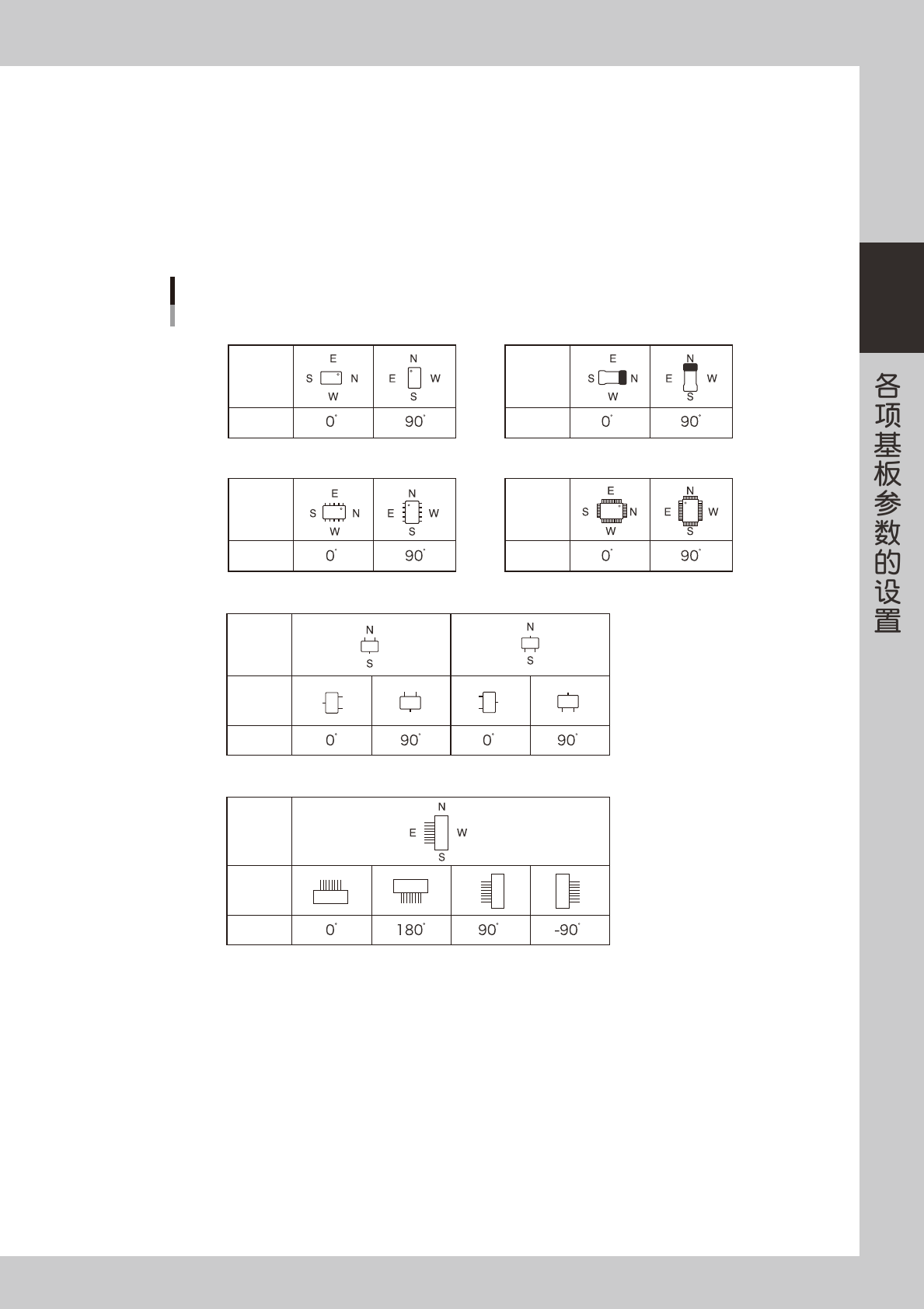
E: 吸附角度
· 输入贴装头在送料器上方吸附元件时的旋转角度。此设置决定识别元件时的元件方向 ( 识别基准 )。
一般,元件包装外形横方向长时设置为 0 度 ;竖方向长时设置为 90 度。
· 设置晶体管的吸附角度时,必须使引脚对着 NS 方向设置,因此元件包装外形竖方向长 ( 封装部的竖方向 ) 时,设置为 0 度;
横方向长时设置为 90 度。参考下表输入正确的吸附角度。
· 设置 SOP 的吸附角度时,必须使引脚对着 EW 方向设置,因此元件包装外形横方向长 ( 封装部的横方向 ) 时,设置为 0 度 ;
竖方向长时设置为 90 度。参考下表输入正确的吸附角度。
· 设置接插件的吸附角度时,必须使接插件的引脚对着 E 方向设置,参考下表输入正确的吸附角度。
元件包装外形
吸附角度
元件包装外形
吸附角度
元件包装外形
吸附角度
元件包装外形
吸附角度
识别基准
元件包装外形
吸附角度
识别基准
元件包装外形
吸附角度
■ 方形芯片元件 ■ MELF芯片
■ SOP
■ 微型Tr/SOT
■ 接插件 E
■ QFP
吸附角度
25218-P2-10
F: 吸附高度
设置吸附元件时使吸嘴下降的 Z 轴的高度校正值。
一般设置为“0.0”,想要降低时,输入正值,想要升高时,输入负值。
G: 吸附时间
设置吸附元件时从感知真空压到吸嘴在下降端停留的时间 ( 秒 )。
芯片元件等小型元件,一般都设置为“0.00”。此设置还与外接托盘交换器连动。
H: 吸附速度
设置吸附元件时贴装头的下降轴 (Z 轴 ) 的速度。如果想要进一步放慢速度,只需降低数值。一般设置为 100(%)。
I: XY 速度
设置从吸附元件到贴装元件之间 XY 轴的速度。如果想要进一步放慢速度,只需降低数值。一般设置为 100(%)。
2-32
2
J: 吸附 / 贴装真空传感器检查
一般设置为“通常检查”。如果想要更严格地检查吸附错误和元件被带回的现象,设置为“特殊检查”。如果想要对 QFP、
BGA 等元件的吸附错误和带回元件现象比其它元件作更严格地检查时,设置为“特殊检查”。
n
要点
设置为“通常检查”,可以控制吸贴元件时下降后的贴装头开始上升的时机。“真空传感器检查”的设置只在基板信息的“负压确认”
设置为“执行”时才有效。
K: 吸附真空压
此真空压是执行真空传感器检查时用的基准真空压。
使用数据库的默认设置,根据需要,参阅本章“3.1进行元件调整”进行调整。
L: 吸附时机
设置吸附元件时贴装头开始真空动作的时机。
如果选择“通常”,贴装头下降前开始执行真空动作 ;如果选择“下降端”,贴装头下降后开始执行真空动作。
一般设置为“通常”。
M: 吸附动作
指吸附贴装元件时吸嘴的下降动作。一般设置为默认值“标准”。
选择“详细设置”,可以详细设置吸贴元件时的“轴停止”条件和吸嘴的“上升”、“下降”顺序。
N: 轴停止
一般设置为“通常”。
吸附小型元件等精度要求较高的元件时,选择“公差等待”( 此参数只有将“M: 吸附动作”设置为“详细设置”时才有效 )。
O、P: 下降、上升
设置适合元件使用的吸嘴下降和上升的顺序。
如果没有特殊问题,可以使用默认设置 ( 此参数只有将“M: 吸附动作”设置为“详细设置”时才有效 )。
Q: 负荷控制 (YSM40 FL 贴装头、Z:LEX[YSM20] FM 贴装头 )
设置吸附元件时是否进行负荷控制。进行负荷控制时,选择“执行 ( 高精度 )”。
R: 目标负荷 (YSM40 FL 贴装头、Z:LEX[YSM20] FM 贴装头 )
使用负荷控制时,输入目标负荷。可在 0.0N 〜 60.0N 范围内以 0.1N 为单位输入,但实际可以使用的范围为 5.0N 〜 25.0N。
S: 吸嘴接触面偏移量
设置元件顶面最高点到吸嘴前端接触位置的距离。