CPP2157620_SMT_Programming_C程序编辑手册.pdf - 第52页
2-2 2 1.1 基板参数 打开“基板”画面的“基板”选项卡画面,确认或设置基板参数。 n 要点 合并基板程序时,必须按轨道切换按钮切换到想要操作的轨道之后再进行设置。 c 注意 合并基板程序时,可以分别按轨道进行编辑的参数有“A、B : 基板尺寸” 、 “D : 备注”和设定张数的参数 E 〜 I。其它参数无法按 轨道分别进行编辑。这些参数可以选择其中 1 条轨道进行编辑,所编辑的内容会对两条轨道都有效。 基板参数画面 以双轨贴片机…
2-1
2
1.创建基板信息
基板信息中需设置基板的形状、生产方法、元件的贴装位置等参数。
在此,主要介绍基本程序的创建方法。充分掌握作业内容之后,可以采用适合自己的方法创建。
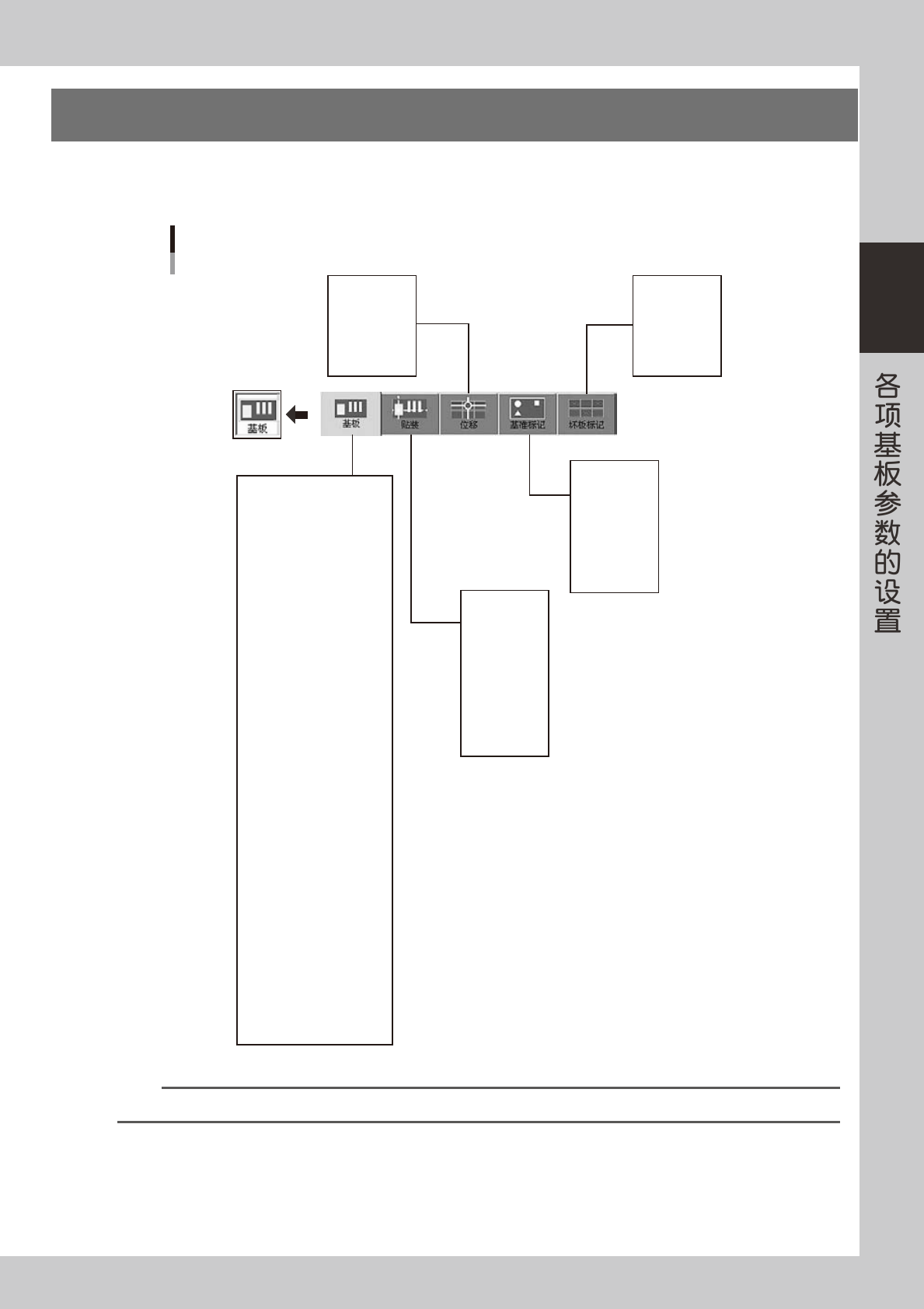
基板参数的构成
No.
图样名
跳过
X、Y、R
元件号码
元件名
Head
坏板标记
基准标记
原拼板号码
贴装模式
传送模式
基板尺寸XY
基板厚度Z
备注
目前生产张数
预定生产张数
1张基板的拼板数
目前下料张数
预定下料张数
基板固定方法
固定开始时间
传出开始高度
传送空转时间
图像处理校正
负压确认
重试方式
提前取料
传送装置Y轴速度
传送方法
传送电机的速度
传入前元件高度
跳过重试
回避邻接干扰
贴装顺序控制
确认传送位置
确认传送位置用判定值
确认传送位置的详细设置
确认传送位置用标记
确认传送位置用标记的坐标X
确认传送位置用标记的坐标Y
传板方法
基板边端偏移距离 左下
基板边端偏移距离 右下
基板边端偏移距离 左上
基板边端偏移距离 右上
No.
图样名
种类
跳过
X、Y、R
原拼板号码
No.
图样名
种类
X、Y
标记
原拼板号码
No.
图样名
种类
X1、Y1
标记1
X2、Y2
标记2
原拼板号码
26200-P2-60
参考
在双轨贴片机中如果选择合并基板程序,会显示轨道切换按钮。按该按钮,可以切换到对象轨道之后再进行确认和设置。
2-2
2
1.1 基板参数
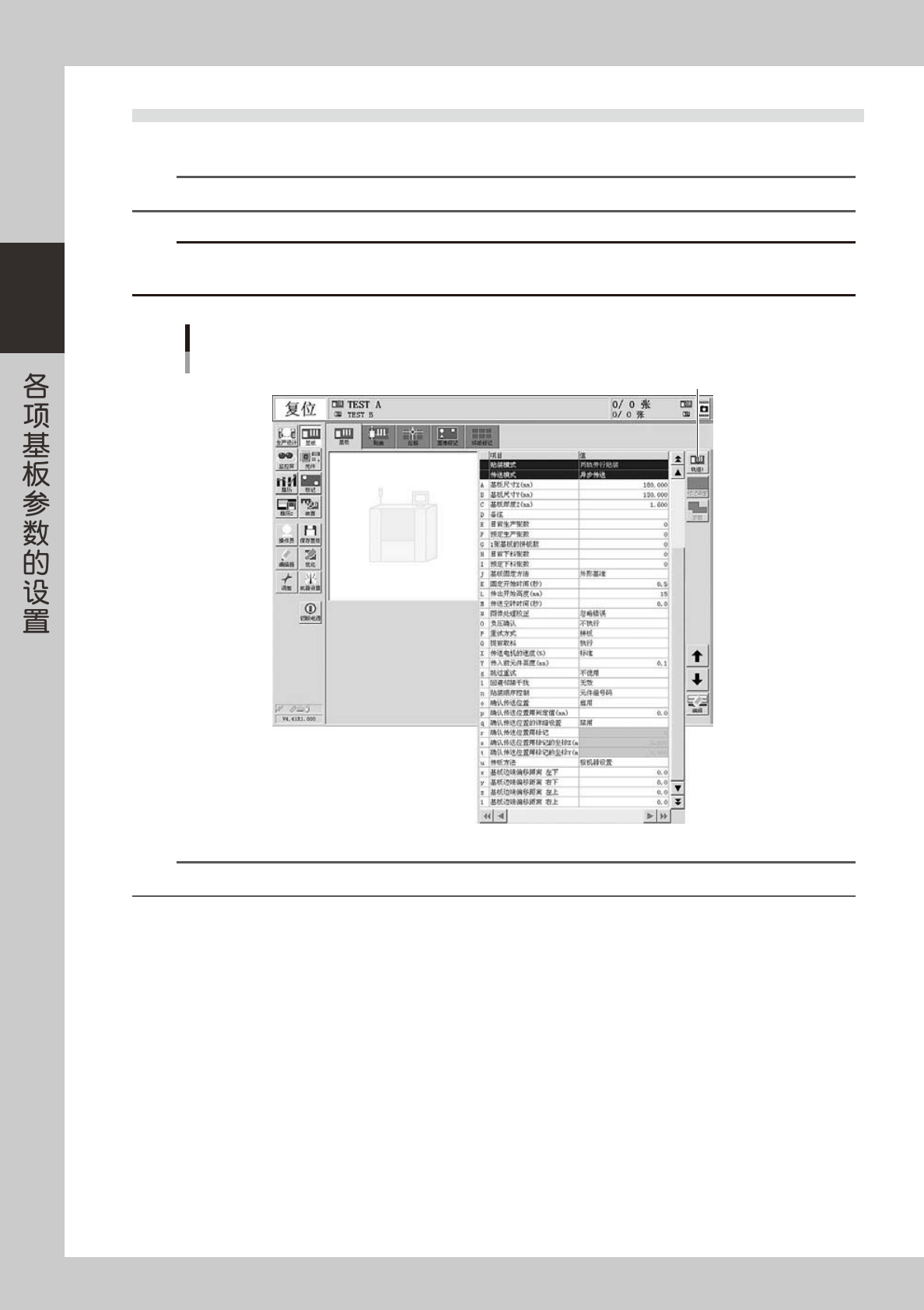
打开“基板”画面的“基板”选项卡画面,确认或设置基板参数。
n
要点
合并基板程序时,必须按轨道切换按钮切换到想要操作的轨道之后再进行设置。
c
注意
合并基板程序时,可以分别按轨道进行编辑的参数有“A、B :基板尺寸”、“D :备注”和设定张数的参数 E 〜 I。其它参数无法按
轨道分别进行编辑。这些参数可以选择其中 1 条轨道进行编辑,所编辑的内容会对两条轨道都有效。
基板参数画面
以双轨贴片机的合并基板程序为例
轨道切换按钮
26201-P2-50
参考
显示项目根据机型、规格不同会有所不同。
贴装模式 ( 双轨 :合并基板程序 )
显示贴装方法。
‧
两轨并行贴装。
前侧贴装头只贴装前侧轨道的基板,后侧贴装头只贴装后侧轨道的基板。
‧
两轨交替贴装。
依次交替贴装前侧轨道的基板和后侧轨道的基板。
传送模式 ( 双轨 :合并基板程序 )
选择传送方法。
‧
同步传送
使两条轨道开始和结束贴装的时机同步。贴装模式为“两轨交替贴装”时无法使用。想要使两条轨道传出基板的时机同步时,
使用同步传送。
‧
异步传送
各轨道分别按各自的时机开始和结束贴装。
2-3
2
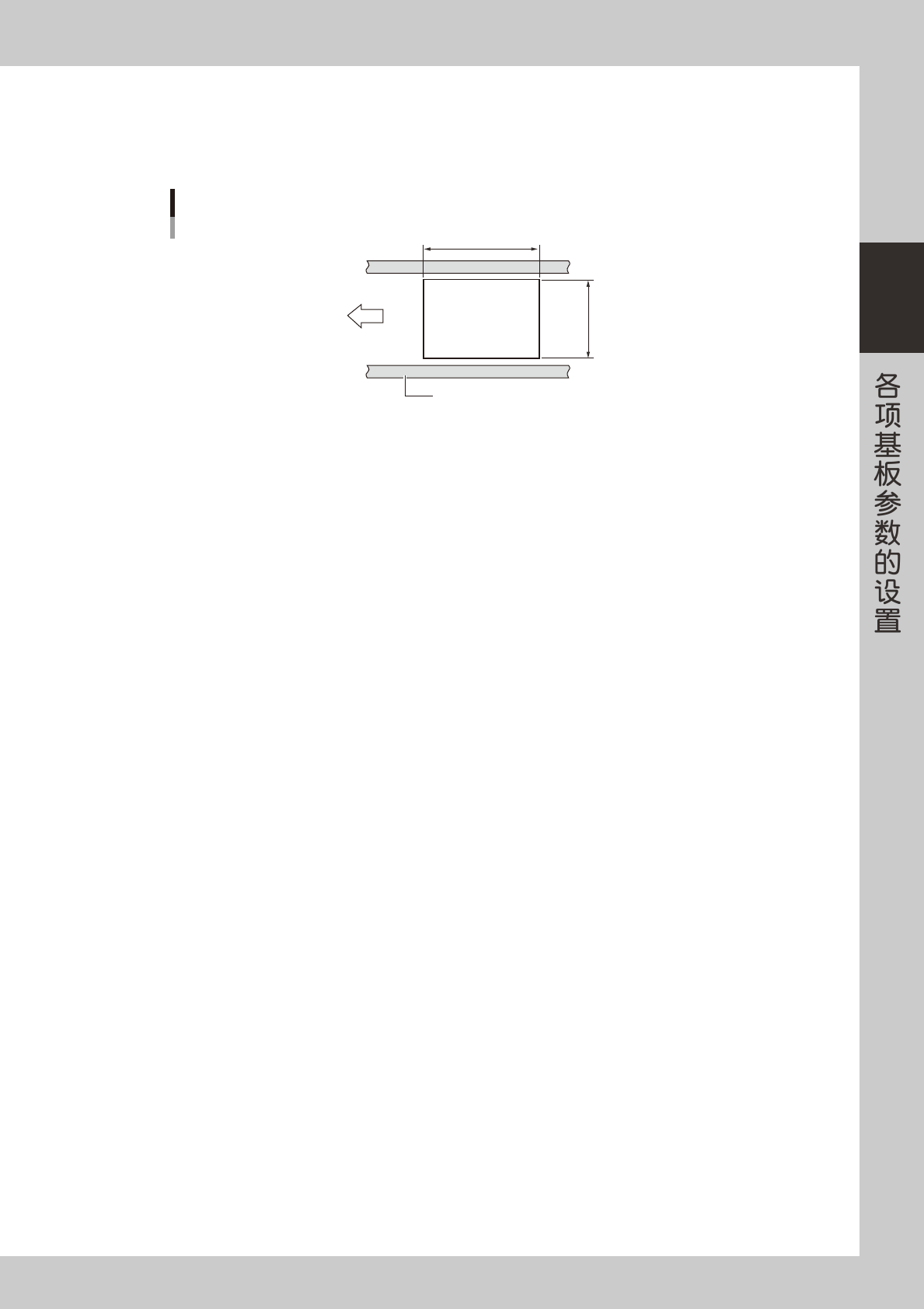
A、B: 基板尺寸 X,Y(mm)
以 mm 为单位输入基板的 XY 方向的尺寸。自动运行时,传送宽度 (W 轴 ) 自动控制为 Y 的尺寸。
X ∶基板传送方向的尺寸
Y ∶放置基板时传送宽度方向的尺寸
X [mm]
Y [mm]
基板
基板
基板传送方向
基板外形
传送轨
25201-P2-00
C: 基板厚度 Z(mm)
输入基板的厚度。
D: 备注
记录有关基板的备注事项,也可以不输入。
E: 目前生产张数
记录已完成生产的基板张数。默认值为 0。
F: 预定生产张数
输入需生产的基板张数。
输入 0 时,只要供给基板,生产就会持续。
输入 0 以外的数据时,生产完所输入的基板张数后,运行停止。不再继续供给基板。
G: 1 张基板的拼板数
输入 1 张基板中拼板的数量。
H: 目前下料张数
记录已传入收板机的基板张数。默认值为 0。
I: 预定下料张数
指定收板机的 1 个载料箱可以容纳的基板张数。完成设定张数的基板生产后,机器会中断传出基板,直到收板机更换载料箱。
如果输入 0,即使基板张数已经达到收板机可容纳的最大张数,生产也会继续进行。符合下列条件的情况,可以输入 0。
· 使用的是可以发出载料箱更换信号的收板机。
· 排列在回流焊机之前的贴片机。
J: 基板固定方法
一般选择“外形基准”。外形基准与顶板连动夹住基板进行固定。
K: 固定开始时间
基板通过安装在主挡板前的基板检测传感器后,机器开始固定基板的动作。
基板尺寸和传送速度不同,开始固定的最佳时机也会不同。通过此参数,可以延迟开始固定的最佳时机。
数值输入范围为 0.0 〜 1.9 秒。
L: 传出开始高度
贴装后,顶板一下降便开始向传送部出口传送基板。如果基板背面已贴有元件,顶板不完全下降会造成元件与顶针发生碰撞。
通过该参数可以分别对各种基板指定顶板的下降高度。如果将固定基板后的顶针高度作为 0mm,则输入从该位置下降几 mm
为传送开始高度。可以在 5 〜 50mm 的范围内输入。
M: 传送空转时间
通常形状的基板设置为 0 秒。
特殊形状的基板 ( 切口、中间镂空等 ),传送部出口传感器在传出基板时容易误识别。此时,如果设置了传送空转时间,基
板检测传感器 OFF 之后,传送带还会按指定的时间继续运转传出基板。在 0.0〜 9.9 秒的范围内输入。