JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第174页
GVシリーズ 自動ディスペンシングシステム 174 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 入 出 力を 設 定 するに は 前提条件 シ ス テ ム が適切に 設定 さ れ て い る 。 「 シ ス テ ム の 設定 と キ ャ リ …
GVシリーズ 自動ディスペンシングシステム
173
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
付録H:治具用プレートの高さのセットアップと使用 (続き)
プログラムで治 具用プレートコマンドを使うには
# クリック 手順 参考画像
1
> FIXTURE
PLATE
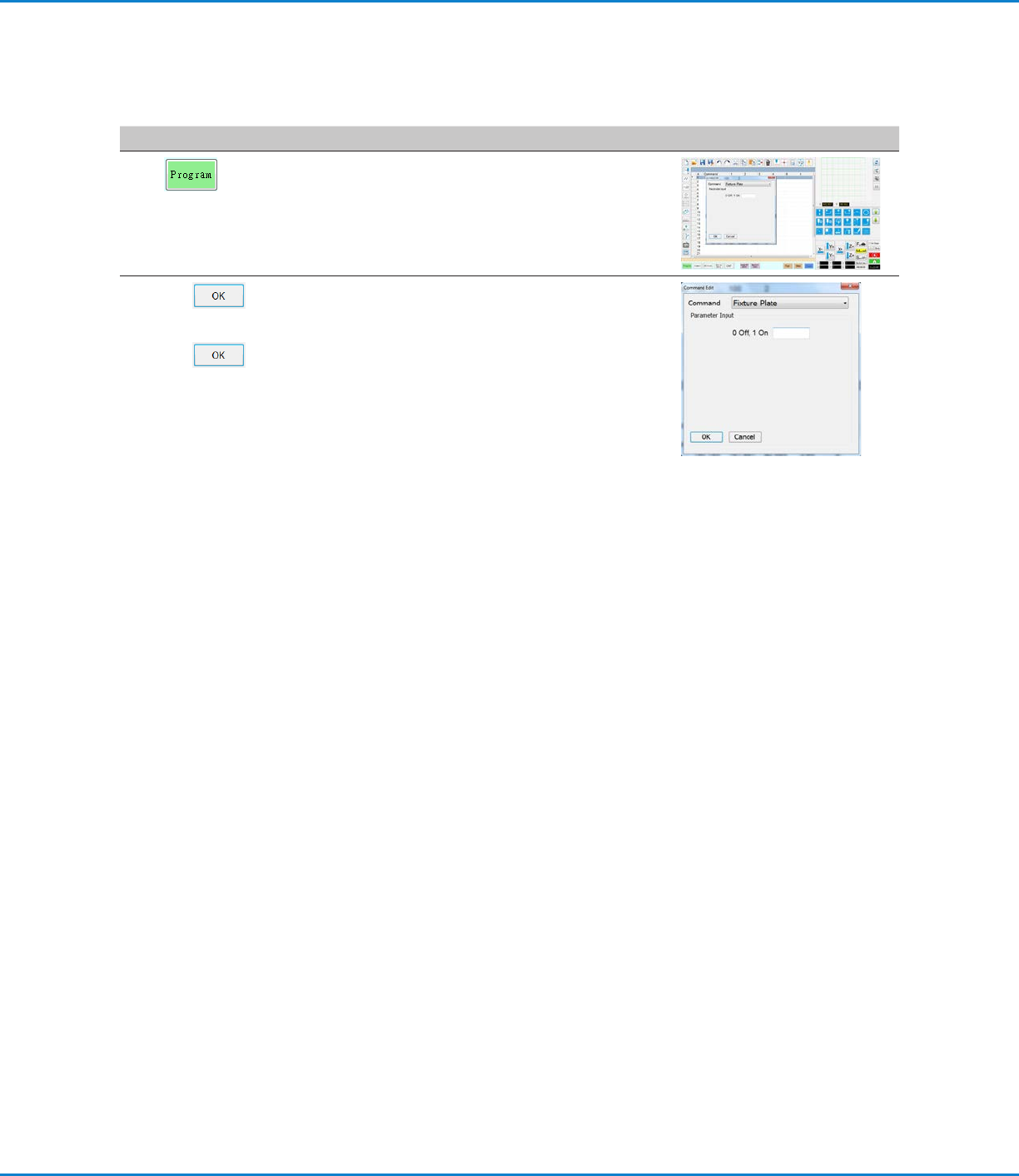
• [PROGRAM] タブをクリックします。
• 最 初 の デ ィ ス ペ ン ス パ タ ー ン コ マ ン ド の 前 に 、ア ド
レス行をダブルクリックし、[FIXTURE PLATE]
を選 択します。
2
1 >
>
FIXTURE PLATE >
0 >
• 最初の治具用プレート コマンドを 1 (ON) に設
定してください 。
• [OK] をクリックしてください。
• 最 後 の ディスペ ンス パ タ ーンコ マンドの 後 に 、
アドレス行をダブルクリックして、[FIXTURE
PLATE] を選択します。
• 最後のディスペンスパターンコマンドの後に、0
(OFF) に設定した治具用プレートコマンドを挿
入します。
• [OK] をクリックします。
GVシリーズ 自動ディスペンシングシステム
174
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
入出力を設定するには
前提条件
システムが適切に設定されている。「システムの設定とキャリブレーションを行う(必須)」(52ページ)を参照してください。
# クリック 手順 参考画像
1
• 信号配線を、GV操作ボックスのI/Oポート
に接 続します。
I/Oポートの位置については、
「GV操作ボックス」(17ページ)
を参 照してください 。
2
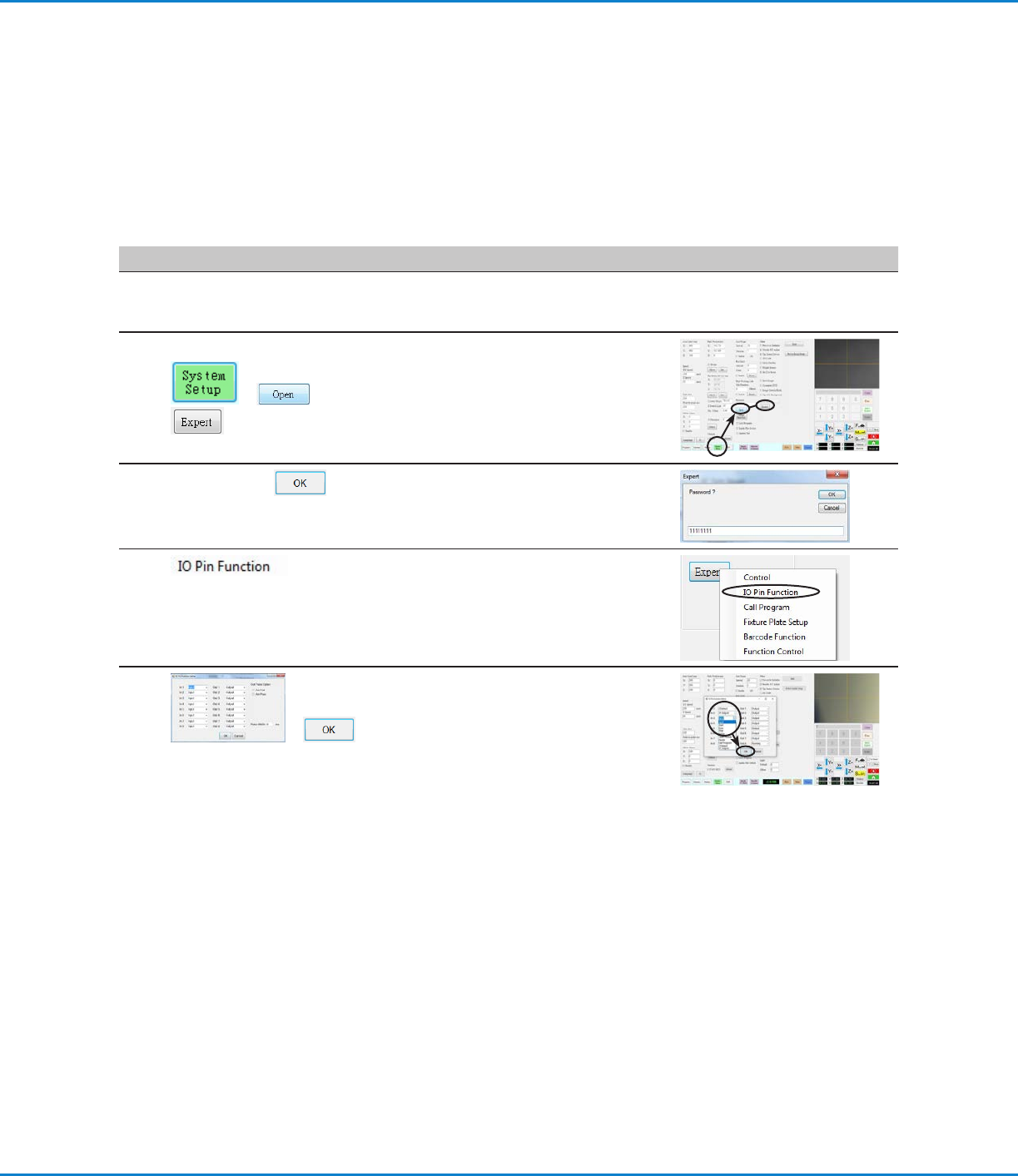
> >
• [System Setup] > [Open] > [Expert]
の 順 にクリックします。
3
11111111 >
• 「11111111」と入力し、[OK]をクリック
します。
4
• [IO PIN FUNCTION]をクリックします。
5
>
• 設定する入力または出力をクリックし、ド
ロップダウンメニューから設 定を選択し
ま す 。コ ン フ ィ ギ ュ レ ー シ ョ ン の 選 択 に つ
い て は 、「 入 力 コ ン フ ィ ギ ュ レ ー シ ョ ン 設
定」(175ページ)と「出力コンフィギュレ
ーション設定」(175ページ)を参照してく
ださい。
• [OK]をクリックします。
付録I:I/Oピン機能の設定
I/Oピン機能は、[System Setup]画面の[Expert]メニューから使用できる機能で、ユーザーはI/O Port(入出力ポート)の各
入出力端子に条件を割り当てることができます。割り当てた条件により、ロボットの動作が変化します。
GVシリーズ 自動ディスペンシングシステム
175
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
付録I:I/Oピン機能の設定(続き)
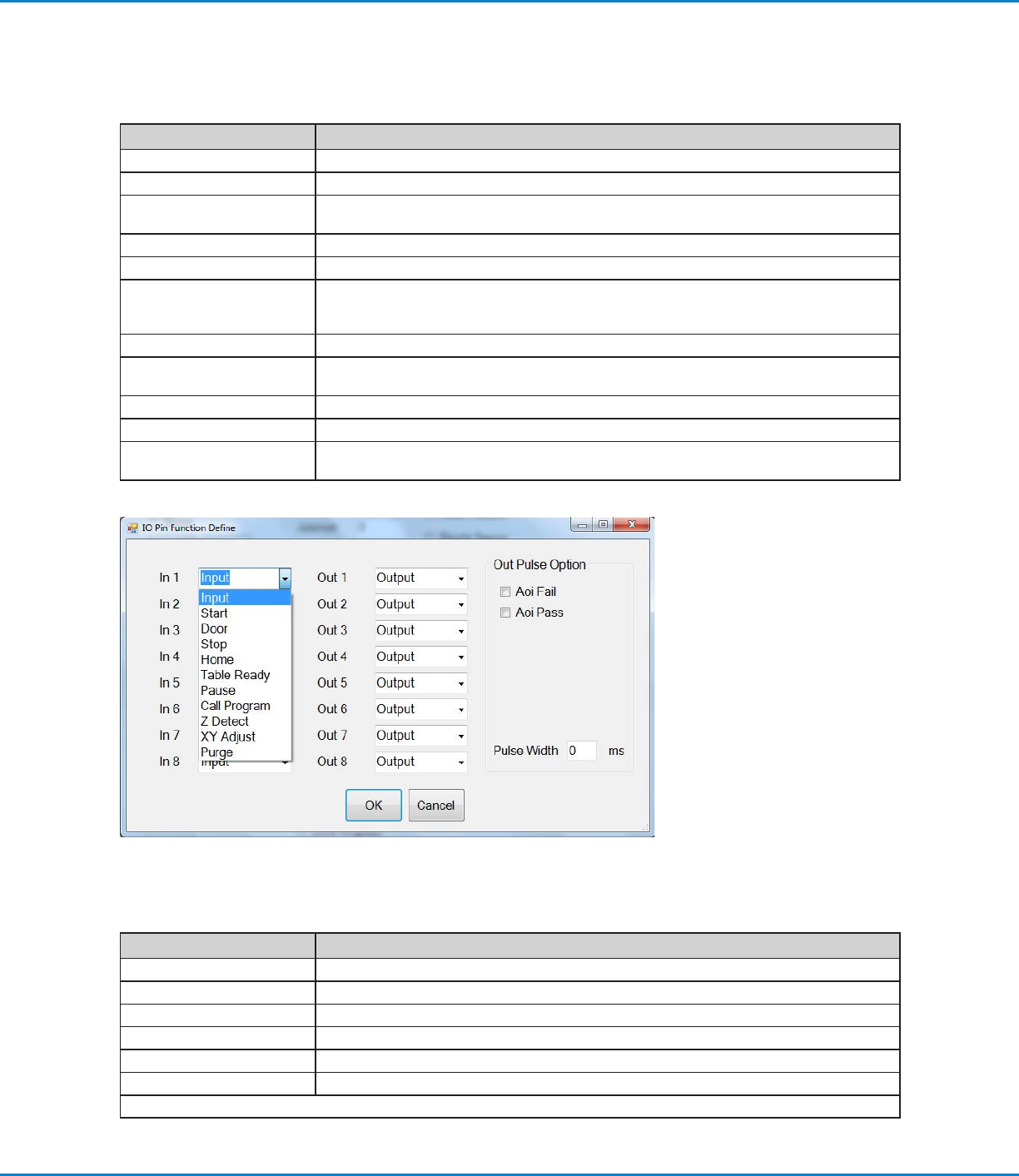
入力コンフィギュレーションの設定
入力 説明
Input デフォルト設定。
Start 塗布プログラムの実行を開始する信号。
Door 塗布プログラムの実行を停止する信号。この設定は、DOOR OPEN出力設定と共に使用する必
要があります。
Stop 塗布プログラムの実行を停止する信号。
Home 塗布プログラムの停止後、ロボットをホームに戻し、再初期化する信号。
Table Ready システムで塗布プログラムを実行する準備ができていることを示す信号。塗布プログラムは、
この入力信号がオフの場合、実行されません。この設定は、TABLE READY出力設定と共に使
用する必要があります。
Pause 塗布プログラムの実行を一時停止する信号。
Call Program 指定されたプログラムを開始するための信号です。この機能を使用するには、「付録J:コール
プログラムのセットアップと使用」(177ページ)を参照してください。
XY Adjust [Needle XY Adjust]を開始する信号。
Z Detect [Needle Z Detect]を開始する信号。
Purge パージを開始する信号です。すべての密閉されたシステムでは、入力 8 (In 8) をパージに設定
する必要があります。
出力コンフィギュレーションの設定
出力 説明
Output デフォルト設定。
Emergency ロボットが停止していることを示す信号。
EMG-B ロボットの[Emergency Stop]ボタンが押されたことを示す信号。
Running 塗布プログラムが実行中であることを示す信号。
Homing ロボットが初期化中で、ホーム位置に戻っている途中であることを示す信号。
Standby ロボットがスタンバイ(アイドル)位置あることを示す信号。
次のページに続く
入力コンフィギュレーションのドロップダウンメニュー