JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第58页
GVシリーズ 自動ディスペンシングシステム 58 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 ロ ボ ッ ト の初期設定 ([Step 4] タ ブ) : マ ー ク を 設定す る # クリッ ク 手順 参考画像 1 • [Step 4] タ …
GVシリーズ 自動ディスペンシングシステム
57
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
ロボットの初期設定([Step 3]タブ):カメラ-ノズル間のオフセットを設定する(続き)
# クリック 手順 参考画像
7
>
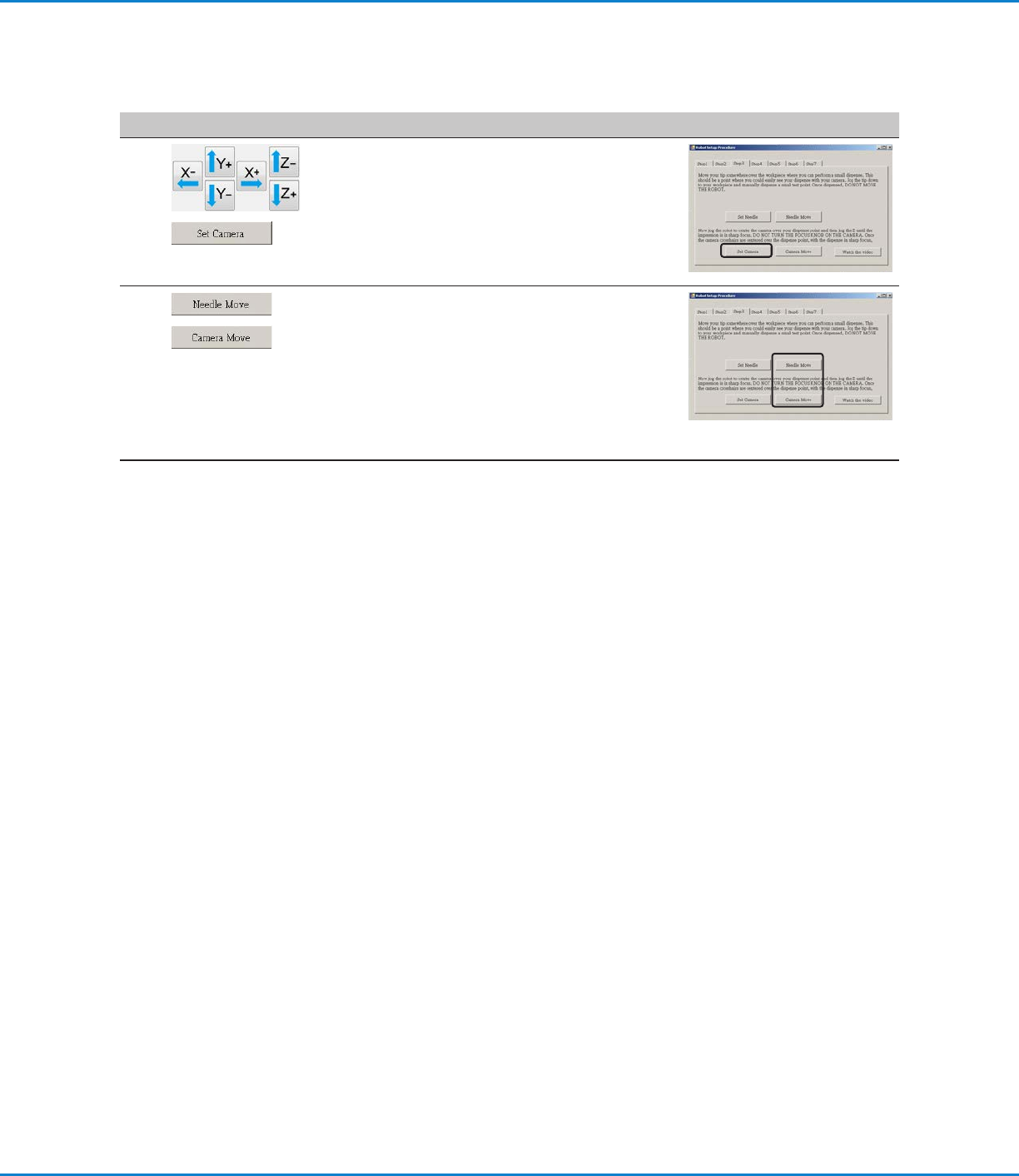
• カメラの十字線がドットの中心に来るまでカメ
ラをジョグ送りします。
• ド ッ ト の 画 像 が は っ き り 見 え る よ う に 、カ メ ラ の
ピントを調 整します。カメラのピントの合 わせ 方
については、必要に応じて「カメラ」(18ページ)
を参 照してください 。
• [Set Camera]をクリックします。
8
>
• [Needle move]をクリックして、設定をテスト
します。
ステップ 5 で試し塗布されたドットの中心にノ
ズルが移動すれば問題ありません。
• [Camera Move]をクリックして、さらに設定を
テストします。
ステップ 5 で試し塗布されたドットの中心にカ
メラの十字線が合えば問題ありません。
9
• 「ロボットの初期設定([Step 4]タブ):マーク
を設定する」(58ページ)に進みます。
[Robot Initial Setup]ウィザードを使用してシステムを設定する (続き)
GVシリーズ 自動ディスペンシングシステム
58
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
ロボットの初期設定([Step 4]タブ):マークを設定する
# クリック 手順 参考画像
1
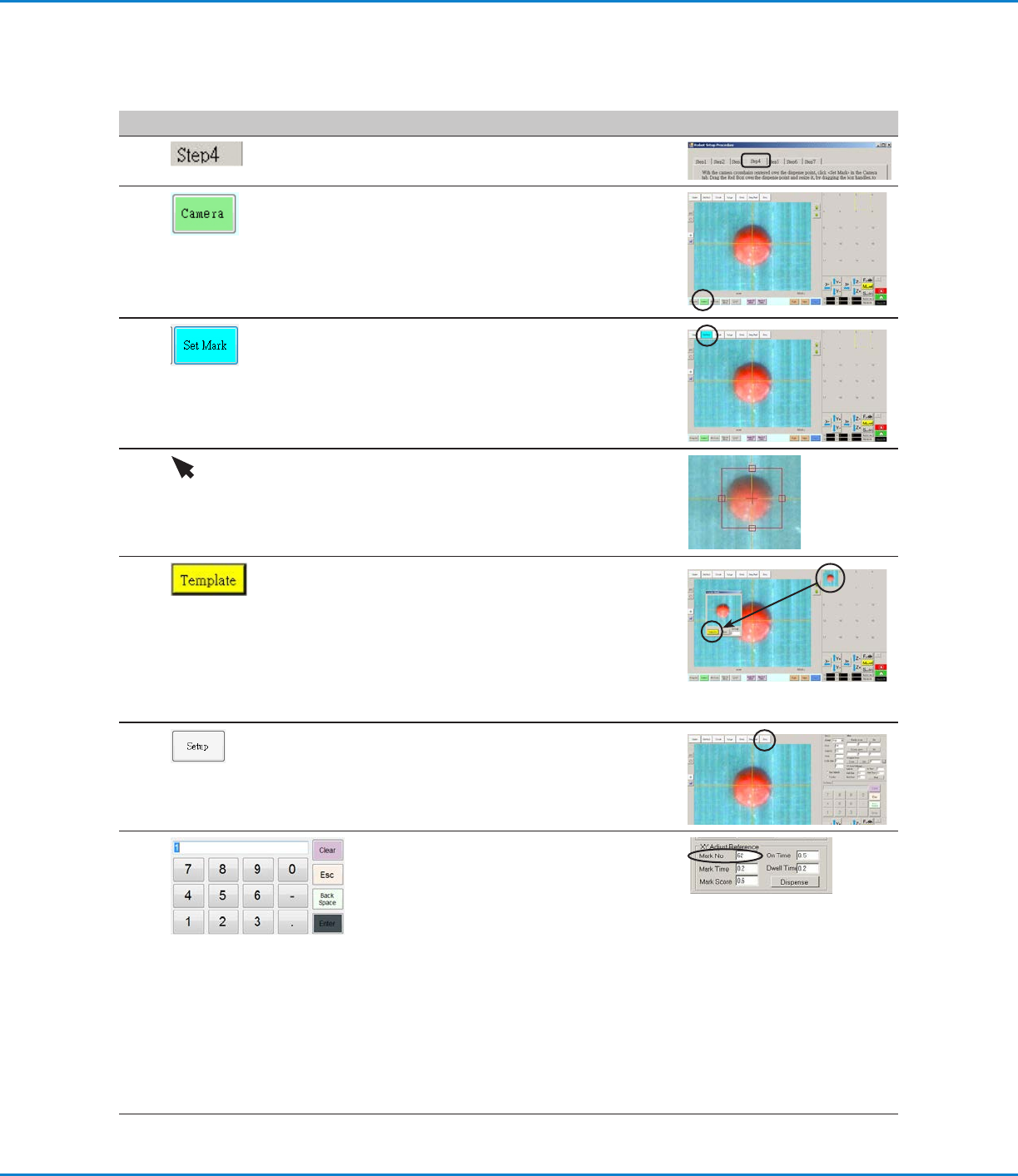
• [Step 4]タブをクリックします。
2
• [Camera]タブをクリックします。
カメラが実際に映しているものが[Primary
View]画面に表示され、マークライブラリが
[Secondary View]画面に表示されます。
3
• [Set Mark]をクリックします。
赤枠が表示されます。
4 • 赤 枠の中 心 をクリックしてドットの上 にドラッグ
し、ドットの輪 郭 に合 わせて赤 枠の 4 つのハンド
ルをドラッグします。
5
マーク番号でマークを保存するため、マーク
ライブラリの 任 意 のソケットをクリックしま
す。[Template Match]ウィンドウが表示された
ら、[Template]をクリックします。
これにより、画像がマークライブラリに保存さ
れます。
注 記: マー ク番 号 を忘 れ ないようにしてくださ
い。
6
• [Setup]をクリックして[Camera]ウィンドウの
[Oset]フィールドに戻ります。
7
• キーパッドを使用して、[XY Adjust
Reference]部の[Mark No]フィールドにマー
ク番 号を入力します。
注 記:
- マーク番号を入力するには、必ずキーパッド
の[Enter]をクリックしてください。
- [Mark Time]には、システムがマークの検出
に使用できる時間を設定します。
- [Mark Score]は、カメラが0.1から1までの
値に基づいてマークをどれだけ正確に検出す
るかを指定します。値が高いほど、より正確な
マッチングが得られます。 値を低くすると、マ
ッチングの精度が低下します。
8
• 「ロボットの初期設定([Step 5]タブ):カメラの
スケールを設定する」(59ページ)に進みます。
[Robot Initial Setup]ウィザードを使用してシステムを設定する (続き)
GVシリーズ 自動ディスペンシングシステム
59
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
ロボットの初期設定([Step 5]タブ):カメラのスケールを設定する
# クリック 手順 参考画像
1
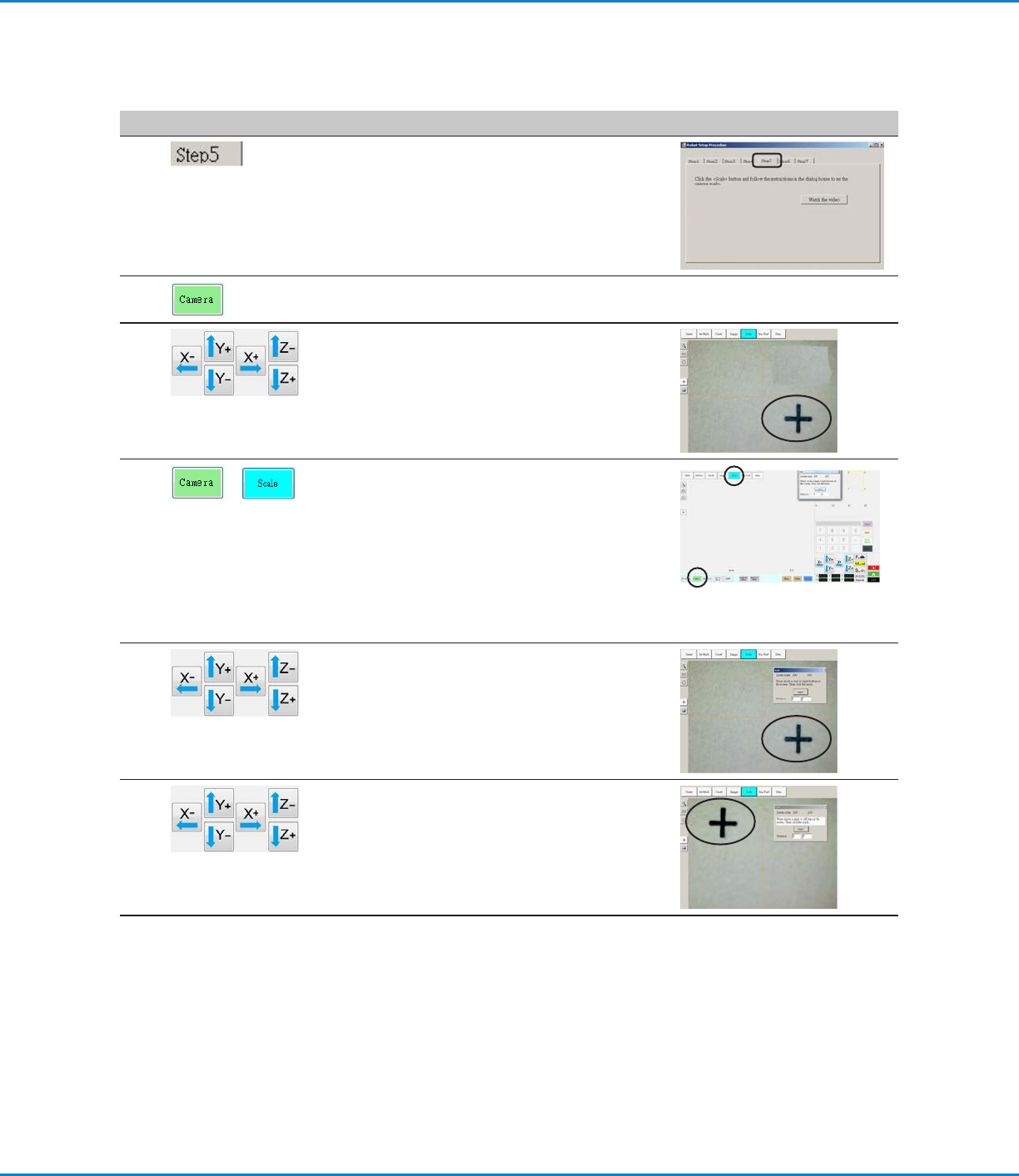
• [Step 5]タブをクリックします。
2
• [Camera]タブをクリックします。
3
• カメラを基準点にジョグ送りします。基準点はワ
ークの右下隅にあります。
• 基 準 点にピントを合 わせます。カメラのピントの
合わせ方については、必要に応じて「カメラ」(18
ページ)を参照してください。
4
>
• [Camera]タブをクリックしてから、[Scale]をク
リックします。
[Scale]ウィンドウが開きます。
注 記: カメラは対象物を映すときにピクセルを
実際の寸法に変換します。この変換をカメラが
正確に行えるようにするためには、カメラのスケ
ールを設定して、1インチ当たりのピクセル数と
比較した対象物のサイズをカメラに「学習させ
る 」必 要 が あ り ま す 。
5
• ワーク上の基準点を選択し、この基準点がカメ
ラ画面の右下象限に入るようにカメラをジョグ
送りして、基準点をクリックします。
6
• 次に、同じ基準点がカメラ画面の左上象限に入
るようにカメラをジョグ送りして、基準点をクリ
ックします。
以上で、カメラのスケール設定は完了です。
7
• 「ロボットの初期設定([Step 6]タブ):ノズル-
ワーク間のオフセットを設定する」(60ページ)
に進みます。
[Robot Initial Setup]ウィザードを使用してシステムを設定する (続き)