JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第43页
GVシリーズ 自動ディスペンシングシステム 43 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 [Camera Setup]画面 [Camera] > [Setup] タ ブを ク リ ッ ク す る と 、 カ メ ラ 設定 フ ィ ー ル…
GVシリーズ 自動ディスペンシングシステム
42
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
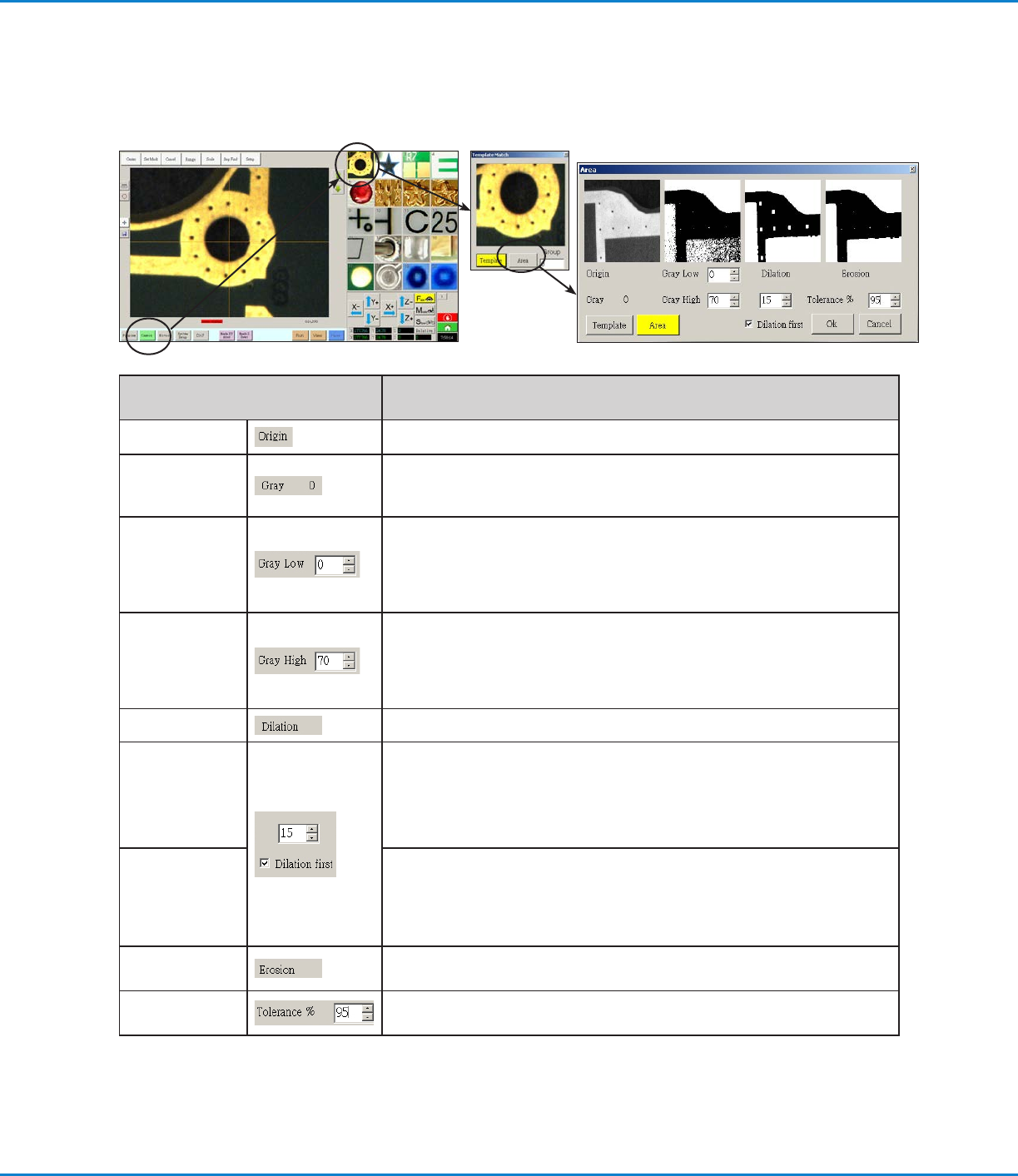
[Template Match]ウィンドウと[Area]ウィンドウ
マークが[Mark Library]に保存されたら、マーク画像のセルを右クリックし、[PROPERTY]を選択して[Template Match]
ウィンドウを開くことができます。[Template Match]ウィンドウから、さらに[Area]ウィンドウを開くことができます。このウィ
ンドウでは、カメラによるマークの評価方法を微調整できます。
[Template Match] > [Area]ウィ
ンドウの各 部
機能
Origin
開いたマーク画像を表示します。
Gray
元画像で選択したポイントのグレーレベルを表示します。あるポイントを選択す
ると、そのポイントのグレーレベルが値に反映されます。この値を把握すること
で、最適な Gray Low 値と Gray High 値を容易に特定できます。
Gray Low
グレー低許容値を調整します。値が低くなるほど、画像内の白色の許容範囲が広
くなります。値が高くなるほど、画像内の白色の許容範囲が狭くなります。
注 記: 通常、Gray Low 値は Gray High 値よりも低い値になります。
範囲:0–255
Gray High
グレー高許容値を調整します。値が低くなるほど、画像内の白色の許容範囲が狭
くなります。値が高くなるほど、画像内の白色の許容範囲が広くなります。
注 記: 通常、Gray High 値は Gray Low 値よりも高い値になります。
範囲:0–255
Dilation
膨張(Dilation)計算後の画像を表示します。
[Dilation rst]
カウンター
[Dilation rst]にチェックを入れると、[Dilation rst]チェックボックスの上の
カウンターで画像のズームを制御できます。[Dilation rst]のチェックを外すと、
同カウンターで画像内のグレー以外の領域をどの程度無視するかを制御できま
す。
範囲:0–20
[Dilation rst]
チェックボックス
膨張(Dilation)計算および収縮(Erosion)計算を実行する順序を設定しま
す。[Dilation rst]チェックボックスがオンの場合は、最初に膨張計算が実
行されます。チェックボックスがオフの場合は、最初に収縮計算が実行されま
す。[Dilation rst]のチェックを外すと、[Dilation]ラベルと[Erosion]ラベルの
位 置が 入れ替わります。
Erosion
[Erosion]の上の画像は、画像から白色がどの程度フィルタリングされたかを示
します。
Tolerance
他のマーク画像と選択画像との類似性をどの程度許容するかを設定します。これ
により、類似するマークを除去できます。
GVシリーズ 自動ディスペンシングシステム
43
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
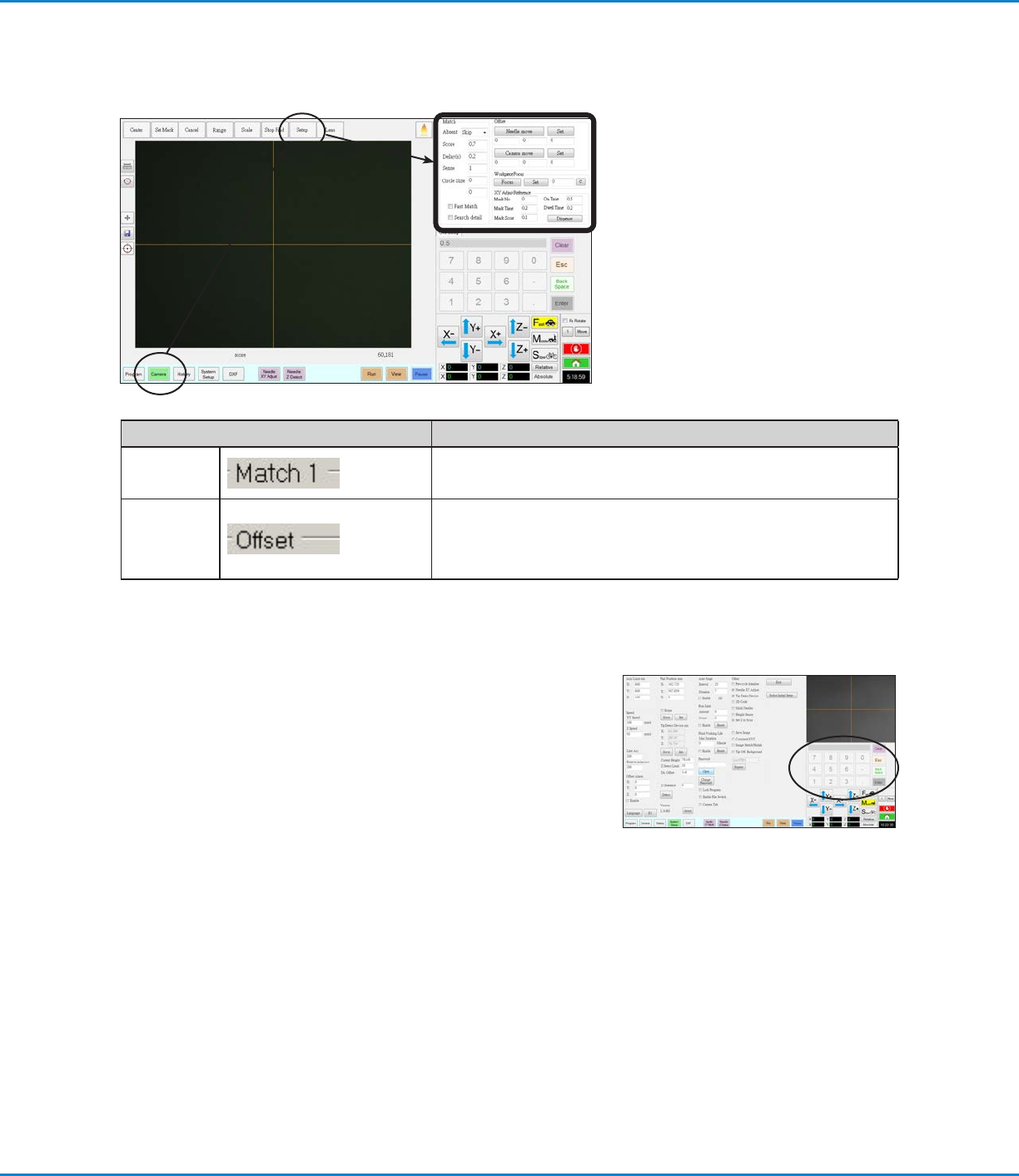
[Camera Setup]画面
[Camera] > [Setup]タブをクリックすると、カメラ設定フィールドが表示されます。カメラが実際に映しているものは
[Primary View]画面に表示され、各カメラ設定フィールドは[Secondary View]画面に表示されます。
[Camera]画面の設定ウィンドウの各部 機能
Match
カメラによるマークの探索方法に関係する設定です。「マークの検出方法
を設定する(任意)」(65ページ)を参照してください。
Oset
[Robot Initial Setup]ウィザードを使用せずに、ノズルカメラ間のオフ
セットを手動でキャリブレーションする必要がある場合のみ使用します。
「付録B:ウィザードを使用しない場合の設定手順」(147ページ)を参
照してください 。
キ ー パッド
データ入力フィールドがあるときには、数値キーパッド(テンキー)が表示さ
れます。キーボードの数字キーを使用する代わりに、キーパッドをマウスでク
リックして、数値を入力することができます。数字の入力方法に関係なく、シス
テムで入力を受け入れるには、(キーパッドまたはキーボードの) Enterキー
を使 用してください 。
GVシリーズ 自動ディスペンシングシステム
44
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
セットアップ
設置後、プログラムの作成を開始する前に、以下の必須および任意の設定手順を、ご使用の自動ディスペンシングシステムに
応じて実行してください。
[System Setup]画面のフィールド
注 記: デフォルト値は、選択したロボットモデルによって異なる場 合があります。
項目 画面キャプチャ 説明
Axis Limit
ロボットが移動できる範囲制限を設定します。 デフォルト設定より高い値を入
力することはできません。
Speed (Point
to point
speed)
ポイントからポイントへの軸の移動速度を設定します。最高速度の仕様につい
ては、「仕様」(13ページ)を参照してください。
注 記: ナビゲーション&ジョグウィンドウの横にある[2]をクリックして、ジョグ
速度の設定値を変更することもできます。詳細については、「ナビゲーション&
ジョグウィンドウ」(37ページ)を参照してください。
注意
ロボットは、パターンの複雑さに応じて速度を自動的に調整します。ロボットを
無理に高速で稼働させると、精度が下がり、システムの運用に支障をきたすおそ
れがあります。
次ページに続く
システムパラメーターを設 定する
工場出荷時に、ほとんどの用途に適したシステム設定が行われています。以下の手順は、必要に応じてシステム設定を表示し
たり、変更したりするときに実行してください。重要なシステム設定項目には、以下のものがあります。
• Speed:ノズルがポイントからポイントへ移動する速度を設定する方法。
• Line Acc:あるポイントから別のポイントへロボットを加速する方法。
ポイント間の移動におけるロボットの加速方法
#
クリック 手順 参考画像
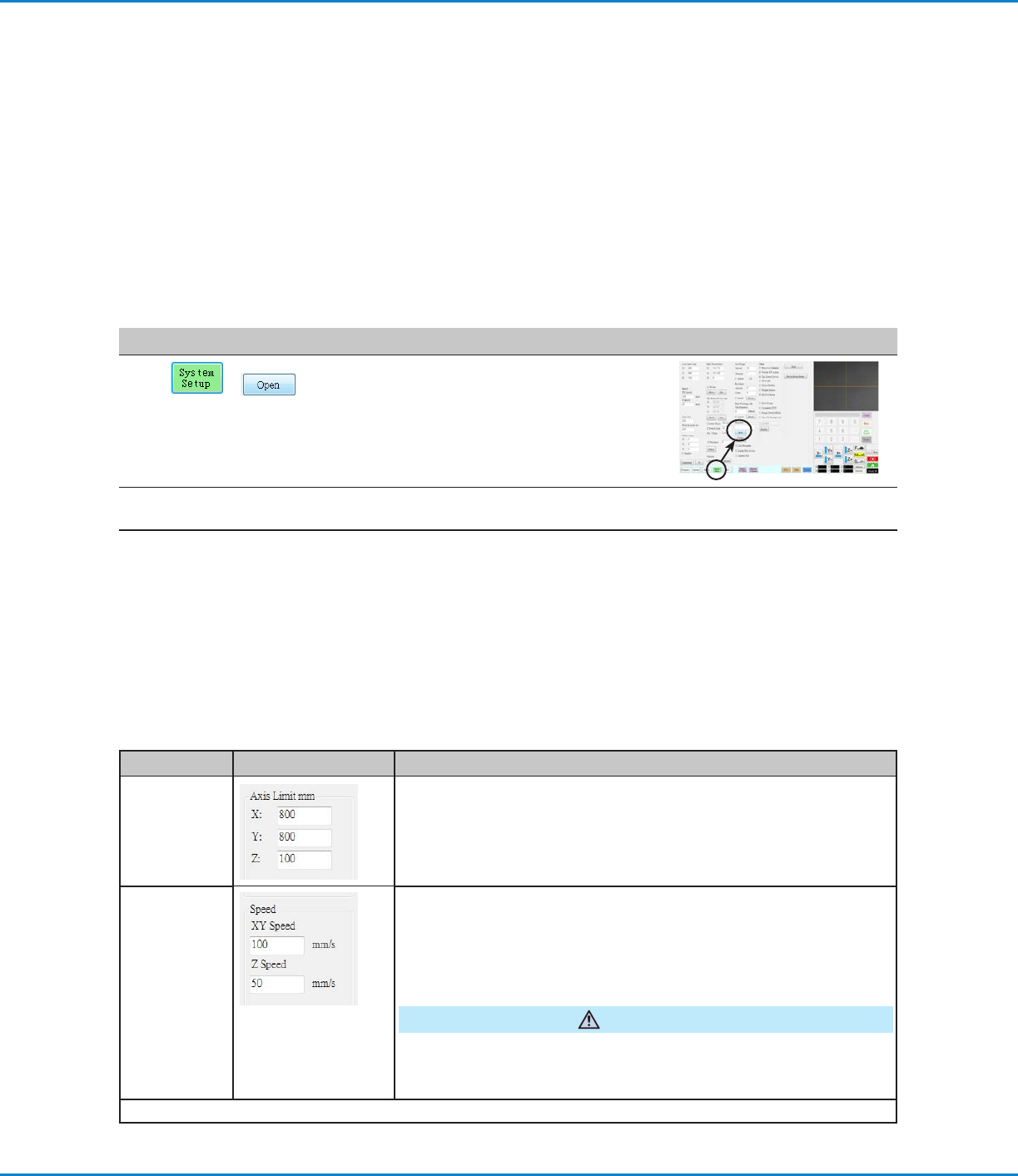
1
>
• [System Setup]タブをクリックしてか
ら、[Open]をクリックします。
2
• パラメーターを確認するか、用途に合わせて変更します。システムレベルのパラメー
ターについては、以下の「[System Setup]画面のフィールド」を参照してください。
3
• 他のタブをクリックして[System Setup]画面を閉じます。
注 記: [Model]と[Language]の選択内容を除き、設定は自動的に保存されま
す。[Model]と[Language] の変更は、DispenseMotion ソフトウェアを閉じ、再度
開いたときに有 効になります。