JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第35页
GVシリーズ 自動ディスペンシングシステム 35 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 水 平 ツ ールバ ー と垂 直ツ ールバ ー のア イ コン フ ァ イ ル の 管理や 特定の コ マ ン ド の 挿入な ど 、 下表 の機能 を…
GVシリーズ 自動ディスペンシングシステム
34
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
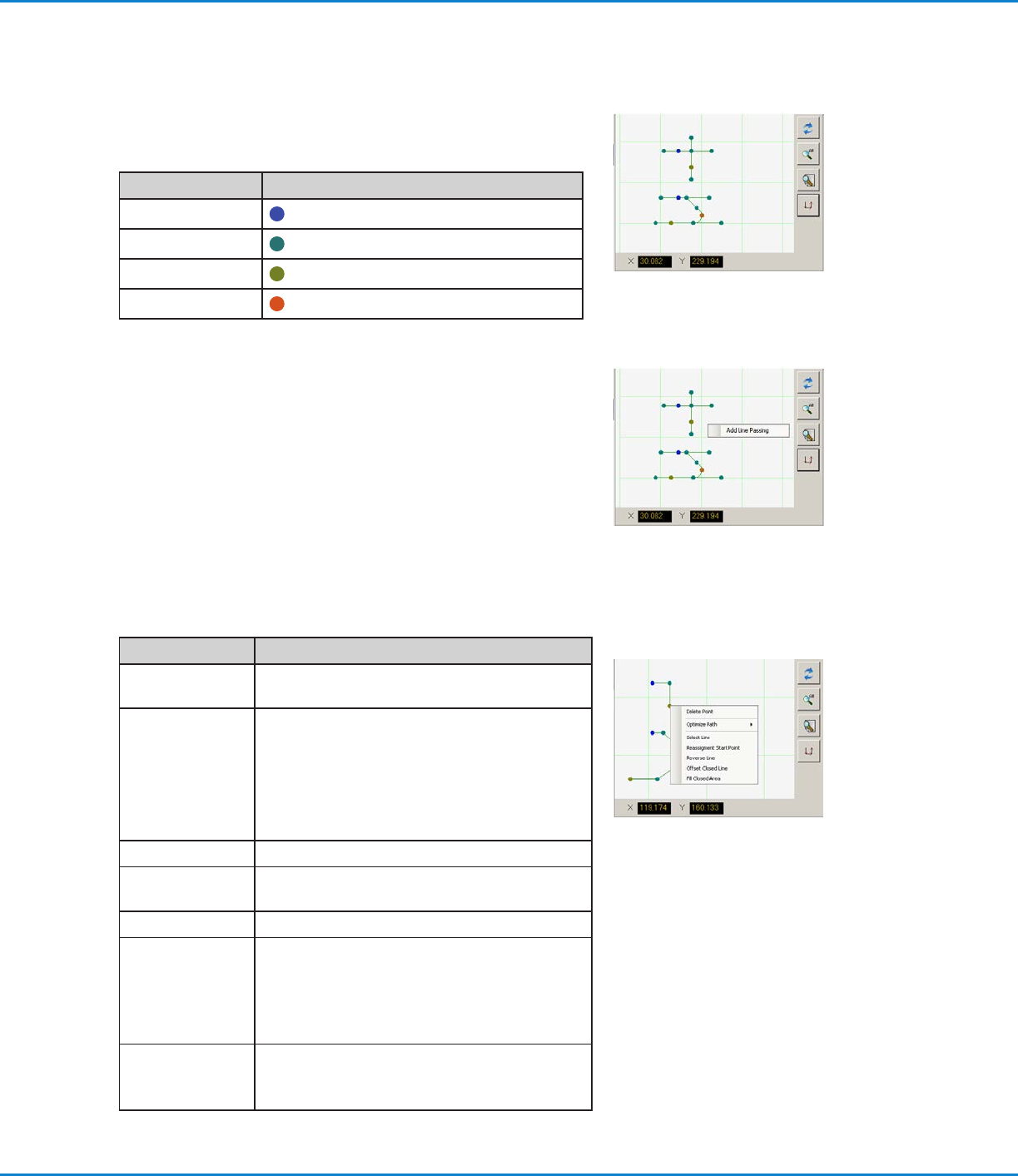
パスビューの[Secondary View]画面
パスビュー のポイントの色
[Secondary View]画面がパスビューにある場合([Path]アイコンが[ON]
に切り替えられている)、プログラムされたパターンが視覚的に表示されま
す。 ポイントの 色は、プログラムされたポイントコマンドを表します。
ポイントコマンド パスビュー画面の色
Line Start
青
Line Passing
緑
Line End
オリーブ
Arc Point
オレンジ
パスビューの右クリック機 能
パスビュー画面で、任意のポイント(コマンド)を右クリックして右クリックメ
ニューを開きます。 選択したポイントでは、以下の機能を利用できます。
パスビューの線とポイントの色
任意のポイントを右クリックして右ク
リックメニュー を開 きます
項目 機能
Delete Point 選 択したポイントを削 除し、前のコマンドを次のコ
マンドに接 続します。
Optimize Path 編集用のパスを開きます。
• [Line Path Start]と[Line Path End]を選択
し、パターンのLine StartポイントとLine Endポ
イントを編 集します。
• [Arc Path Start]と[Arc Path End]を選択
し、Arc Pointの開始点と終点を編集します。
Select Line パターン全体を選択します。
Reassignment
Start Point
Line Startポイントを選択したポイントに再割り当
てします(パスを閉じる必要があります)。
Reverse Line パターンを反 転します。
Oset Closed
Line
Line StartからLine Endに線を追加し、Line
StartとLine Endを同じ場所に再割り当てて、パタ
ーンを閉じます。
• [Oset Length (mm)]は、元のパターンを基準
にしてパターンを 拡 大します。
Fill Closed Area パターンの領域を塗りつぶします。
• Brush Width (mm): 各塗りつぶし領域のらせ
ん間の距離。
Line Passingの追加
パスビューグリッドの任意の場所(ポイントではない)を右クリックして、Line
Passingポイント(コマンド)を既存のポイントにステッチします。 追加できる
のは、水平線または垂直線のみです。
右クリックして、Line Passingポイン
トを既存のポイントにステッチします
GVシリーズ 自動ディスペンシングシステム
35
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
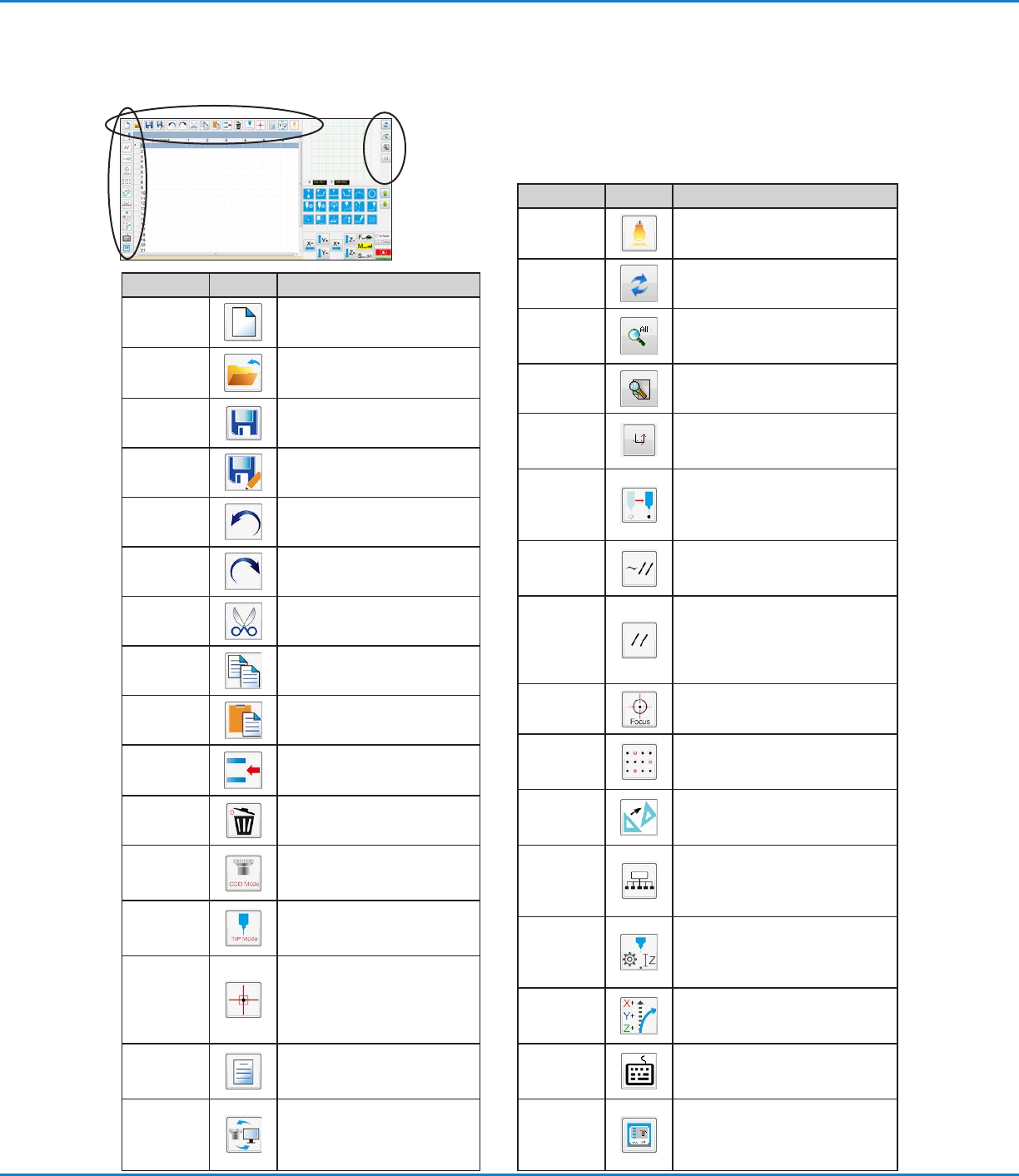
水平ツールバーと垂直ツールバーのアイコン
ファイルの管理や特定のコマンドの挿入など、下表の機能を実行するには、水平ツールバーと垂直ツールバーのアイコンを使
用します。
アイコン名 アイコン 機能
A New File
新しいファイルを作成します
Open a File
ファイルを開きます
Save
開いているファイルを保存し
ます
Save As
開いているファイルに名前を付
けて保存します
Undo
最後のコマンドを取り消します
Redo
最後のUndoアクションを復元
します
Cut
選択範囲を切り取ります
Copy
選択範囲をコピーします
Paste 選択範囲を貼り付けます
Insert
メモリアドレスを挿入します
Delete
現在のメモリアドレスを削除
します
CCD Mode
システムのモードをカメラモー
ドとノズルモードの間で切り
替えます
Tip Mode
システムのモードをカメラモー
ドとノズルモードの間で切り
替えます
Match
マークライブラリで選択された
マークにカメラの中心を合わせ
ます(カメラは塗布対象基材上
のマークの近くになければなり
ません)
Example
プログラムの作成に使用できる
コマンドの例を含むサンプルプ
ログラムを提供します
Path
[Secondary View]画面を
[Camera]ビューから[Grid]ビ
ューに切り替えます(パスモ
ード)
アイコン名 アイコン 機能
Light
(表示されている場合) Light設定を
一時的に無効にできます
Refresh
(パスモードのみ)[Secondary
View]画面を更新します
See All
(パスモードのみ)プログラムされて
いるポイントをすべて[Secondary
View]画面に表示します
Magnify
(パスモードのみ)[Secondary
View]画面のエリアを拡大します
Path
Direction
(パスモードのみ) ロボットアーム
が移動する方向を示す矢印を提供
します
Move
ノズルまたはカメラを選択された
アドレスのXYZ位置に移動しま
す(アドレスに位置の値がある場
合)
Enable
Address
以前、[Disable Address]を使って
無効化されたアドレスを再度有効
化します
Disable
Address
プログラムのコマンドを無効化し
ます(コマンドを再度有効化する
には、アドレスを選択した状態で
[Enable Address]をクリックし
ます)
Focus
初期設定に基づいて、Z位置をフォ
ーカス位置に自動的に移動します
Step &
Repeat
Block
Step & Repeatコマンドで、配列
内の選択された位置にある対象基
材が塗布されないようにします
Transform
アップロードされたDXF図面のプ
ログラムポイントを、塗布対象基
材上の実際の位置と揃えます
Extend
Step &
Repeat
Step & Repeatコマンドのすべて
のコマンドを展開します(これを
取り消すには[Undo]アイコンを使
用する必要があります)
Change Z
Value
プログラム内のコマンドまたは選
択されたコマンドリストのZ値を変
更します(主に塗布ギャップの微
調整や調整に使用されます)
Point
Oset
塗布対象基材の配置が変更された
場合に、プログラムポイントをす
べて変更または移動します
Joystick
接続されている場合、オプション
の制御方法(ジョイスティックなど)
のオンとオフを切り替えます
Pico Touch
Pico Touch リモートコント
ロール、UltimusPlus、または
7197PCP コントローラー ウィン
ドウを開きます。
GVシリーズ 自動ディスペンシングシステム
36
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
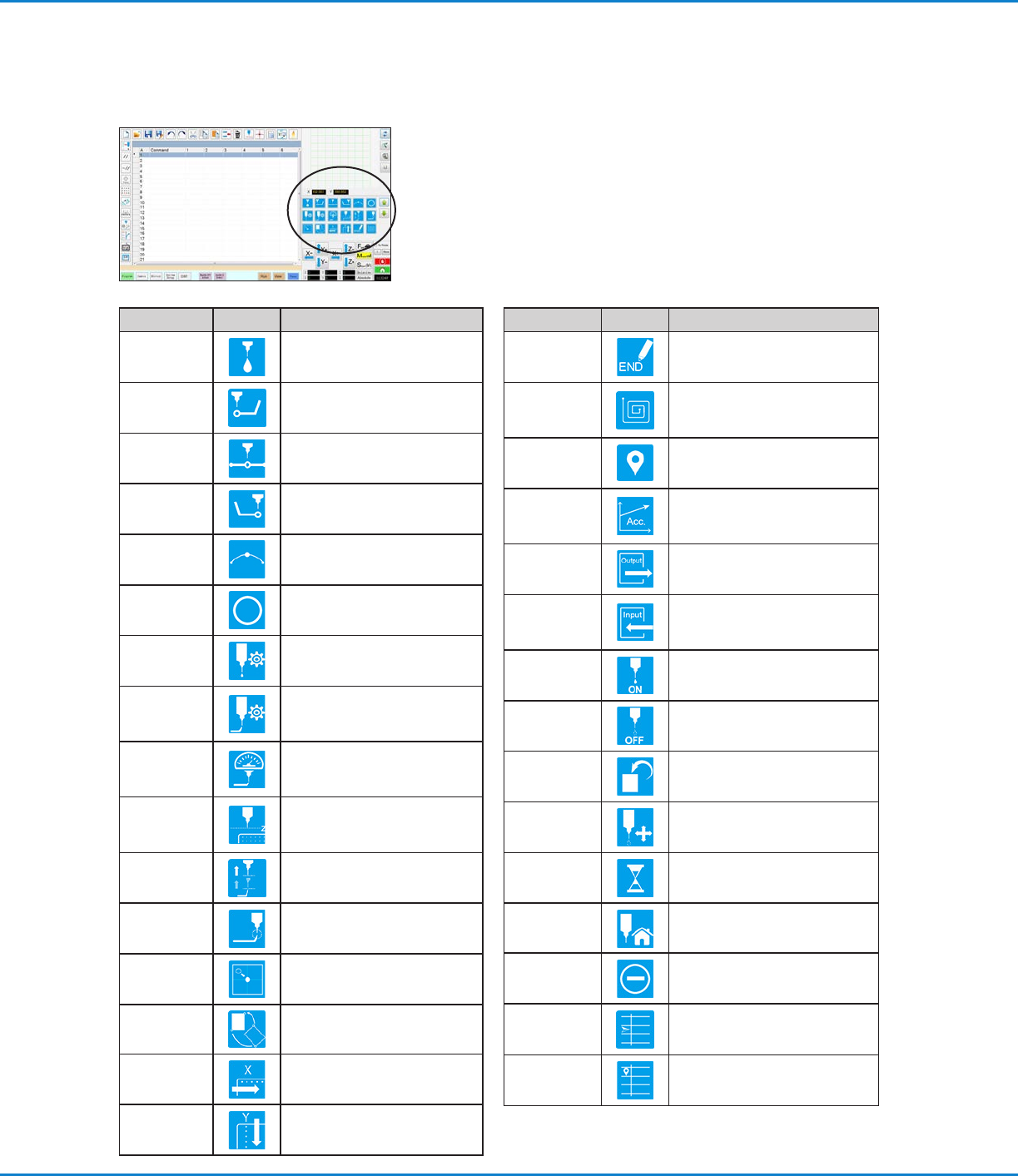
セットアップコマンドアイコンと塗布コマンドアイコン
プログラムの番号付きアドレスに関連するコマンドを入力するには、塗布コマンドとセットアップコマンドのアイコンをクリック
します。アイコンリストを上または下に移動するには、緑色の矢印を使用します。すべてのコマンドに関する詳細については、「
付録A:コマンド機能リファレンス」(117ページ)を参照してください。
アイコン名 アイコン 機能
End
Program
プログラムを終了します
Fill Area
[Fill Area]パラメータの設定に
従って、特定のエリアに塗布し
ます
Label
プログラムの指定された位置の
ラベルを登録します
Acceleration
ポイントからポイントへ、また
は連続する軌道に沿ってロボッ
トを加速する方法を変更します
Output
選択した出力信号をロボットか
ら送信します
Input
選択した入力チャネルからの入
力信号をチェックするようロボ
ットに指示します
Dispenser
On
塗布を有効化します
Dispenser
O
ラインコマンドのみディスペン
サーを無効にする
Initialize
保存された訂正データをリセッ
トします
Dummy
Point
現在の位置をダミーポイントと
して登録します
Wait Point
現在の位置を待機ポイントとし
て登録します
Park
ロボットを一時停止位置に送り
ます
Stop Point
現在の位置を停止ポイントとし
て登録します
Goto
Address
プログラム内の指定したアドレ
ス番号までスキップします
Goto Label
プログラム内の指定したラベル
までスキップします
アイコン名 アイコン 機能
Dispense
Dot
現在の位置を、Dispense Dot
ポイントとして登録します
Line Start
現在の位置をLine Startポイン
トとして登録します
Line
Passing
現在の位置をLine Passingポイ
ントとして登録します
Line End
現在の位置をLine Endポイン
トとして登録します
Arc Point
現在の位置をArc Pointとして
登録します
Circle
現在の位置をCircleとして登録
します
Dispense
Dot Setup
Dispense Dotパラメータを設
定します
Line
Dispense
Setup
線状塗布パラメータを設定し
ます
Line Speed
線の速度を設定します(デフ
ォルトの速度設定は上書きさ
れます)
Z Clearance
Setup
Z間隔を設定します(デフォル
トのZ間隔設定は上書きされ
ます)
Dispense
End Setup
塗布後のノズル上昇の速度と高
さを設定します
Backtrack
Setup
塗布後にノズルを元の位置に戻
す方法を設定します
Find Mark
検索マークを登録します
Fiducial
Mark
フィデューシャルマークを登録
します(2個必要です)
Step &
Repeat X
Step & Repeat Xパラメータ
を設定します
Step &
Repeat Y
Step & Repeat Yパラメータ
を設定します