JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第60页
GVシリーズ 自動ディスペンシングシステム 60 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 ロ ボ ッ ト の初期設定 ([Step 6] タ ブ) : ノ ズ ル- ワ ー ク 間の オ フ セ ッ ト を設定 す る # ク リッ ク 手順…
GVシリーズ 自動ディスペンシングシステム
59
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
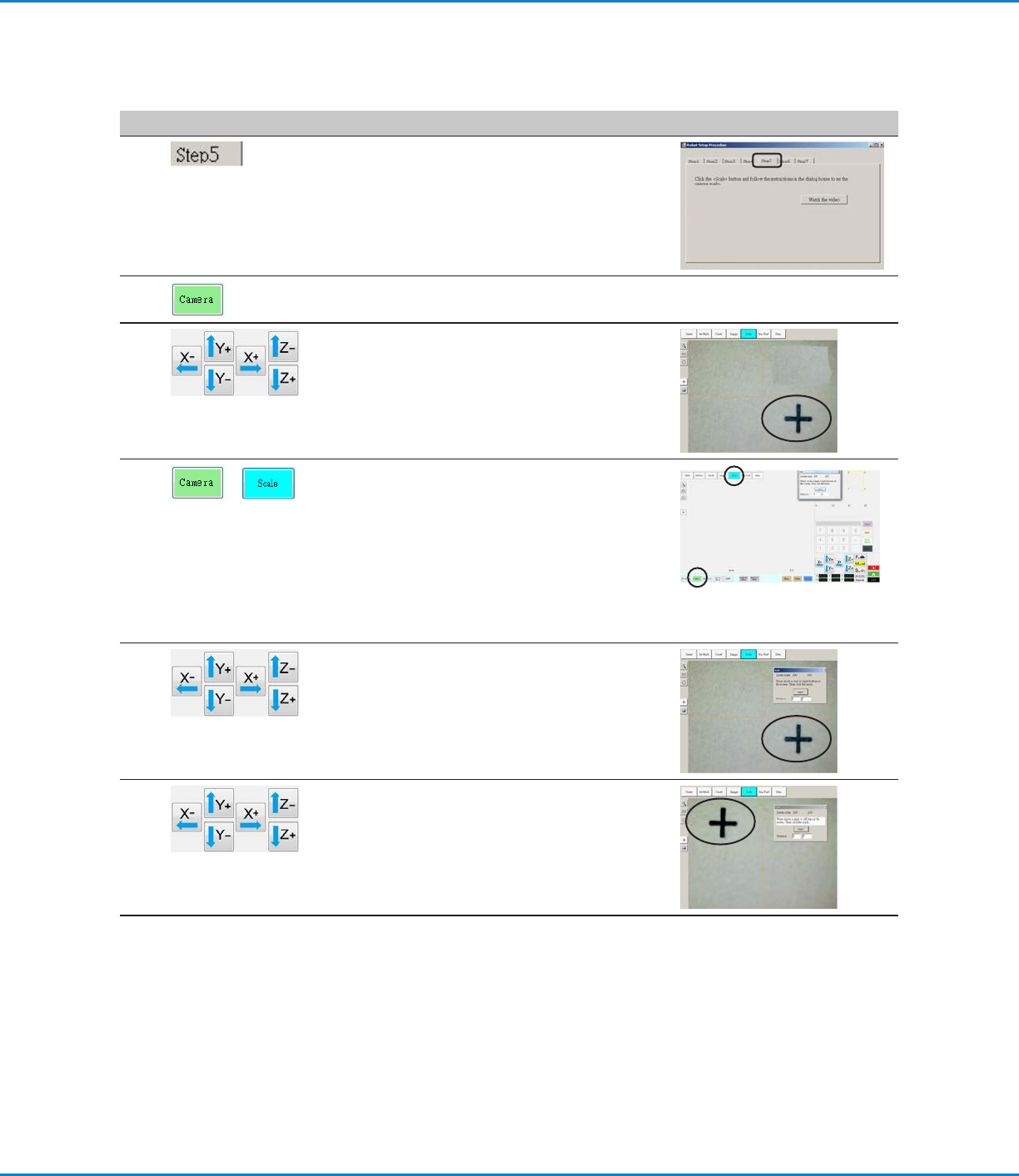
ロボットの初期設定([Step 5]タブ):カメラのスケールを設定する
# クリック 手順 参考画像
1
• [Step 5]タブをクリックします。
2
• [Camera]タブをクリックします。
3
• カメラを基準点にジョグ送りします。基準点はワ
ークの右下隅にあります。
• 基 準 点にピントを合 わせます。カメラのピントの
合わせ方については、必要に応じて「カメラ」(18
ページ)を参照してください。
4
>
• [Camera]タブをクリックしてから、[Scale]をク
リックします。
[Scale]ウィンドウが開きます。
注 記: カメラは対象物を映すときにピクセルを
実際の寸法に変換します。この変換をカメラが
正確に行えるようにするためには、カメラのスケ
ールを設定して、1インチ当たりのピクセル数と
比較した対象物のサイズをカメラに「学習させ
る 」必 要 が あ り ま す 。
5
• ワーク上の基準点を選択し、この基準点がカメ
ラ画面の右下象限に入るようにカメラをジョグ
送りして、基準点をクリックします。
6
• 次に、同じ基準点がカメラ画面の左上象限に入
るようにカメラをジョグ送りして、基準点をクリ
ックします。
以上で、カメラのスケール設定は完了です。
7
• 「ロボットの初期設定([Step 6]タブ):ノズル-
ワーク間のオフセットを設定する」(60ページ)
に進みます。
[Robot Initial Setup]ウィザードを使用してシステムを設定する (続き)
GVシリーズ 自動ディスペンシングシステム
60
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
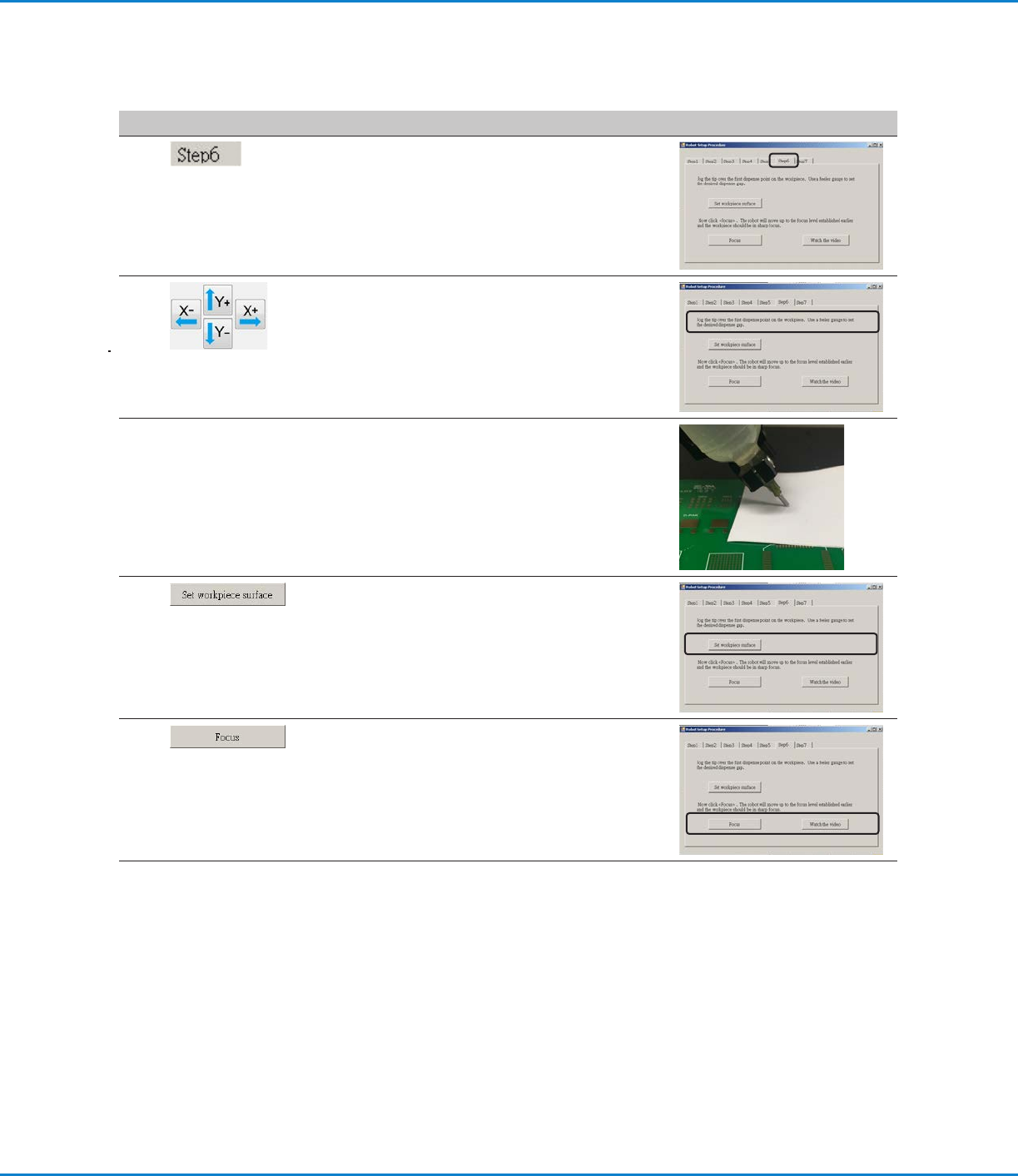
ロボットの初期設定([Step 6]タブ):ノズル-ワーク間のオフセットを設定する
# クリック 手順 参考画像
1
• [Step 6]タブをクリックします。
2
• ノズルをワーク上の適切な基準点にジョグ送り
します。
• ワークの表面に触れないように、ノズルをできる
だけワークに近い位置まで下げます。
3
• 隙間ゲージを使用して、ノズルとワークの間の距
離を設 定します。
4
• [Set Workpiece Surface]をクリックします。
5
• [Focus]をクリックします。
ノズルが正しい焦点高さに移動します。
6
• お使いのシステムがノズル検知器を搭載してい
ない場合は、「(ノズル検知器非搭載のシステム
のみ)システムの設定とキャリブレーションをテ
ストする」(62ページ)に進みます。
• お使いのシステムがノズル検知器を搭載してい
る場合は、「ロボットの初期設定([Step 7]タブ):
(ノズル検知器を搭載したGVシステムのみ)シ
ステムの設定とキャリブレーションをテストする」
(61ページ)に進みます。
[Robot Initial Setup]ウィザードを使用してシステムを設定する (続き)
GVシリーズ 自動ディスペンシングシステム
61
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
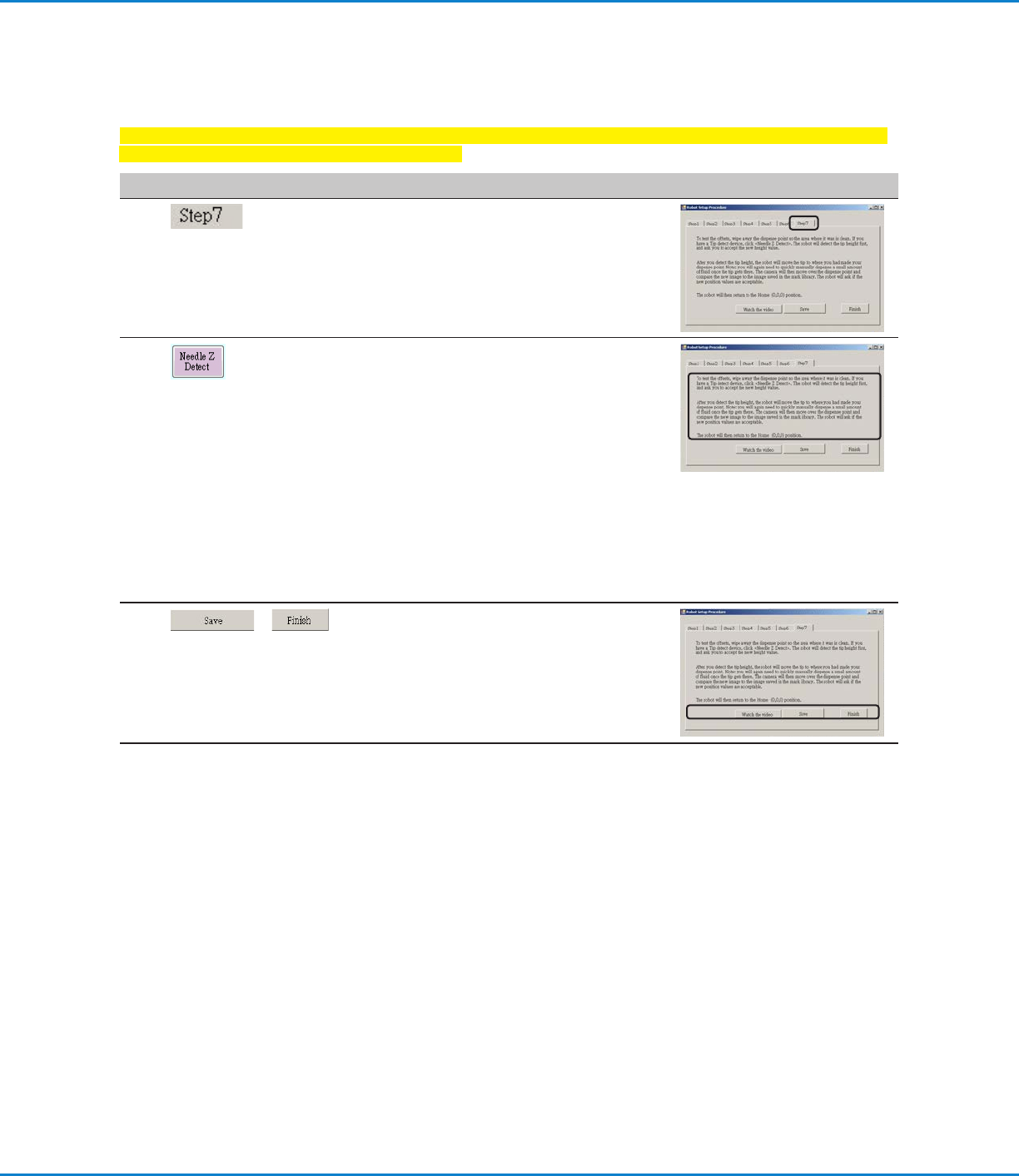
ロボットの初期設定([Step 7]タブ):(ノズル検知器を搭載したGVシステムのみ)システムの設定とキャリブ
レーションをテストする
重要:お使いのシステムがノズル検知器を搭載していない場合は、「(ノズル検知器非搭載のシステムのみ)システムの設定
とキャリブレーションをテストする」に進んでください。
# クリック 手順 参考画像
1
• [Step 7]タブをクリックします。
2
• [Needle Z Detect]をクリックして、設定をテス
トします。
• 確認メッセージが表示されたら、[Yes]/[OK]を
クリックします。
注 記:
- Needle Z Detectが実行されると、Needle
Z Detectの完了直後にNeedle XY Adjust
が自動的に実行されます。
- [Needle Z Detect]を選択した場合のシス
テムの応答の詳細については、「Needle Z
DetectまたはNeedle XY Adjustへのシス
テムの応答」(62ページ)を参照してください
3
>
• [Save]をクリックします。
• [Finish]をクリックします。
以上で、システムの設定とキャリブレーションは完
了です。プログラムの作成については、「プログラミ
ング」(69ページ)を参照してください。
[Robot Initial Setup]ウィザードを使用してシステムを設定する (続き)