JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第27页
GVシリーズ 自動ディスペンシングシステム 27 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 オ フ セ ット に つ い て オフ セッ ト は 、 2 つ の コ ン ポ ー ネ ントの 距 離 を 指 し ま す。 プ ロ グ ラム を 作…
GVシリーズ 自動ディスペンシングシステム
26
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
プログラミングの概要
プログラムの作成を始める前に、本セクションで説明する概要をよく理解してください。
プログラムとコマンドについて
プログラムとは 、ファイルとして保 存されたコマンドの 集まりです。各コマンドは 、番 号 付きアドレスとしてファイルに保 存されま
す。コマンドは、さらに以 下 のコマンドタイプに分けられます。
• セットアップコマンド - XYZ 座標や Z 間隔の高さなど、プログラムレベルのパラメーターを設定します。
• 塗布コマンド - XYZ 座標と関係するコマンドであり、塗布コマンドを実行するための信号を塗布システムに自動送信し
ます。
ロボットはプログラムを実行するときに、各アドレスを順番に読み込み、そのアドレスに含まれるコマンドを実行しま す。アドレ
スにセットアップコマンドが含まれている場合、システムはそのコマンドを登録します。アドレスに塗布コマンドが含まれている
場合は、ロボットはそのコマンドが指定する位置に X 軸、Y 軸、および Z 軸を移動し、塗布コマンドを実行します。
塗布コマンドはパターンの構成要素です。塗布コマンドをプログラムするには、ディスペンスノズルを目的の XYZ 位置に移動
し、その位置で塗布コマンドを登録します。この作業を、目的の塗布パターンが完成するまで繰り返します。下表で例をいくつ
か紹 介します。
セットアップコマンドは、塗布コマンドの実行方法を指定します。プログラムの先頭にセットアップコマンドを挿入することをお
勧めします。最も一般的に使用されるセットアップコマンドは、Backtrack Setup、Dispense Dot Setup、Dispense End
Setup、Line Dispense Setup、Line Speed、およびZ Clearance Setupです。
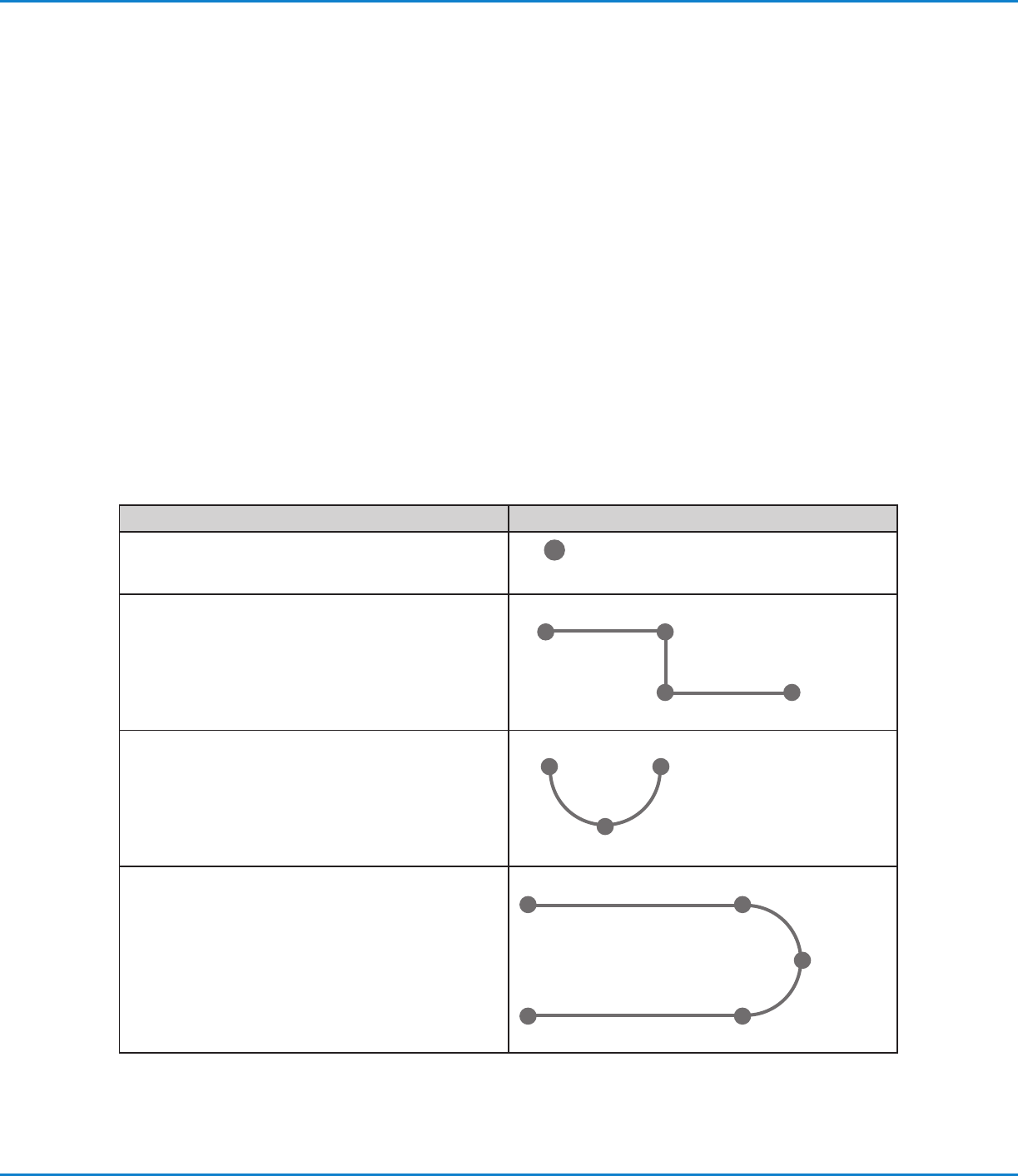
塗布コマンドの例
コマンド 結果として得られるパターン(上から見た図)
液剤を点状に塗布するようにロボットをプログラムする場
合、XYZ 位置を DISPENSE DOT コマンドとして登録し
ます。
Dispense Dot
液剤を直線状に塗布するようにロボットをプログラムする
場合、直線の始点の XYZ 位置をLINE START コマンドと
して登録します。ノズルが進行方向を変える位置は、LINE
PASSING コマンドとして登録します。液剤の塗布を終了す
る位置は、LINE END コマンドとして登録します。
Line Start
Line EndLine Passing
Line Passing
液剤を円弧状に塗布する場合、塗布の始点の XYZ 位置
をLINE START コマンドとして登録します。円弧の頂点
は、ARC POINT コマンドとして登録します。円弧の終点
は、LINE END コマンドとして登録します。
Arc Point
Line Start
Line End
直線と円弧を組み合わせて、複雑な経路に沿って液剤を塗
布することもできます。
Line Start
Line End
Arc Point
Line Passing
Line Passing
GVシリーズ 自動ディスペンシングシステム
27
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
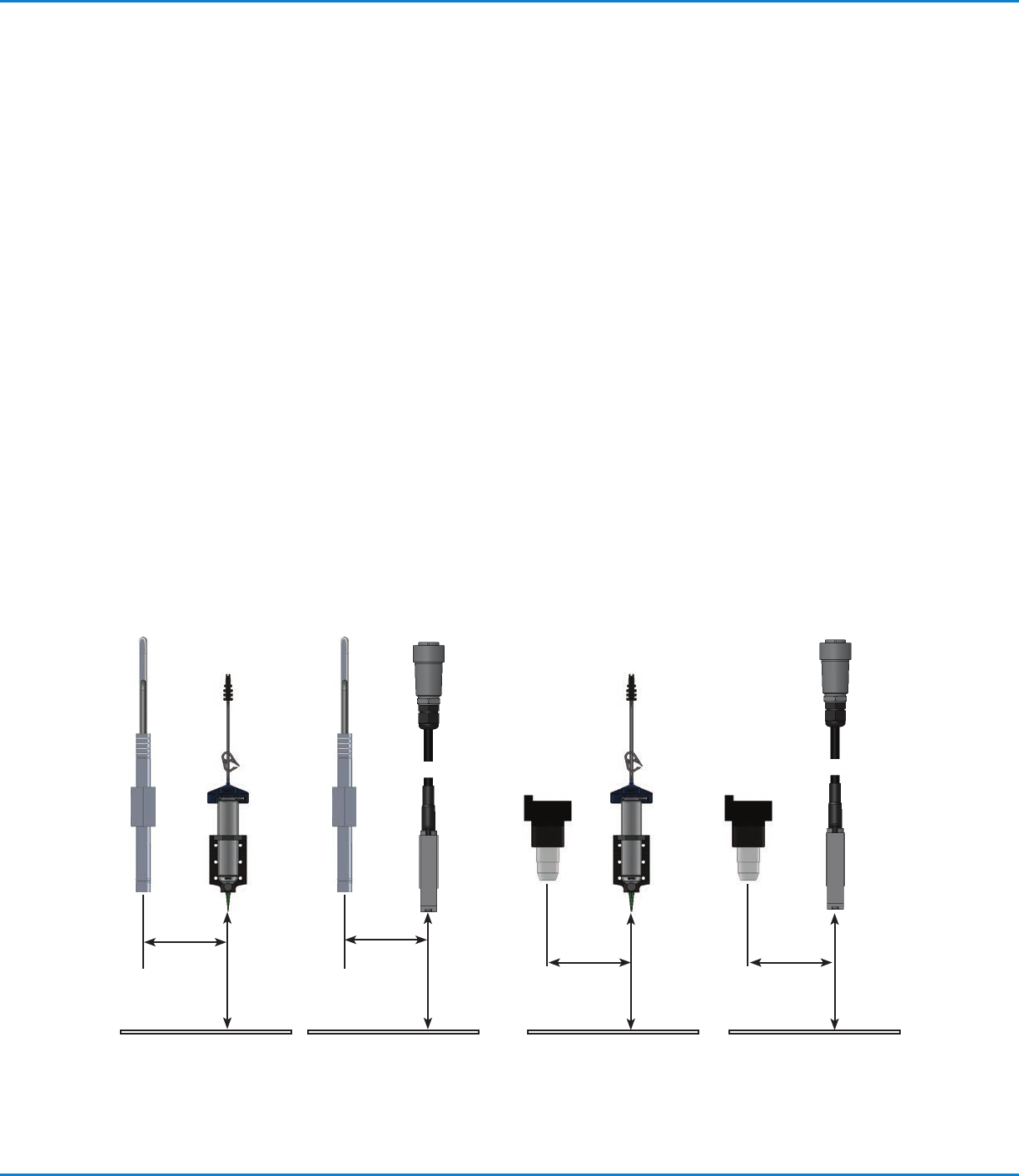
オフセットにつ いて
オフセットは、2 つのコンポーネントの距 離を指します。プログラムを作 成する前に、システムに以 下のオフセットを
「学習させる」必要があります。
• カメラ-ノズル間のオフセット:カメラ視野の中心とディスペンスノズルの中心の間の距離(XY オフセット)。
• ノズル-ワーク間のオフセット:(1)接触塗布では、ノズル先端とワークの間の距離。(2)非接触塗布では、ノズル先端とワ
ークの間の距離(Z 高さ間隔)。
上記のオフセットを適切にキャリブレーションすることにより、ディスペンスノズルがカメラと同じ経路に沿って移動するように
したり、ディスペンスノズルまたは吐出ノズルを交 換したときに生じるわずかな高さの差を補正したりする必要があります。
オフセットは、Robot Initial Setup ウィザードの設定およびキャリブレーションのプロセス中にロボットに通知されます。こ
のプロセスは初回起動時とシステムの変更後にも実行する必要があります。システムの変更例には、以下のものがあります。
• Z 軸に取り付けられたコンポーネント(シリンジバレルやカメラなど)の移動時
• ディスペンスノズルまたは吐出ノズルの交 換時
プ ロ グ ラ ム と コ マ ン ド に つ い て( 続 き )
推奨されるプログラミング方法
• プログラムの先頭に塗布セットアップコマンドを挿入します。
• 塗布コマンドを挿入する前に、まずマークコマンドを挿入します。
• セットアップコマンドとマークコマンドを挿 入してから、塗 布コマンドを挿 入します。
• すべてのプログラムの末尾に End Program コマンドを挿入します。
カメラ-ノズル間のオフセット(XY オフセット)、ノズルワーク間のオフセット(ノズル高さまたは Z 間隔)の図
カメラ-ノズ
ル間 XYオフ
セット
ノズルワーク
間 オフセット
(Z間隔)
ノズルワーク間
オフセット
(Z間隔)
ノズルワーク間
オフセット
(Z間隔)
ノズルワーク間
オフセット
(Z間隔)
カメラ-ノズ
ル間 XYオフ
セット
カメラ-ノズ
ル間 XYオフ
セット
カメラ-ノズ
ル間 XYオフ
セット
ペンシル
カメラ
CCD
camera
シリンジ
バレル
ジェットバ
ルブ
CCD
camera
ペンシル
カメラ
シリンジ
バレル
ジェットバ
ルブ

GVシリーズ 自動ディスペンシングシステム
28
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
マークについて
ワークが存在することを認識したり、ワーク表面上の向きを決めるために、システムはマークやフィデューシャルマークを使用
します。マークは、カメラによって撮影されてマークライブラリと呼ばれる場所に保存された基準画像(ワーク上の狭いエリア
の画像)です。マークライブラリは、[Camera]タブを選択することにより[Secondary View]画面に表示されます。保存され
ている画像は、マークライブラリの「ソケット」に表示されます。画像が保存されていない画像ソケットは空白となります。
マークは、ワーク上の特定の位置を発見するためにシステムが使用する画像です。基準マークは、2 枚 1 組のマーク画像です。
(1)ワークが適切な XY 位置にあるか判定し、(2)回転角度を把握し、その角度に合わせてプログラムを自動調整するため
に使用されます。
DispenseMotion コントローラー上のマーク画像ファイルの保存場所
マーク画像を選択する際の推奨事項
• システムは塗布対象基材の位置に合わせるため、選択は実際の塗布対象基材上(治具用プレート上になし)で行います。
• 単独の部位を選択します。カメラの視野内に同一種類の部位が複数ある場合は、選択しないでください。たとえば、カメラの
視野内に小さな円が複数ある場合は、その円を選択しないでください。
• はっきりした部位が最適です。たとえば、有限直線のない円の中心よりも、大文字の T にある 2 本の線の交点の方がマー
ク画 像 に適しています。
• 壊れた回路基板パレットのエッジよりも実際の塗布位置(シルクスクリーン印刷されたはんだパッドの角など)の方が、製造
時の精度に差があるため、効果的です。
• 基準マーク間の距離が大きいほど、ワーク上で基準マークを検出する精度が高まります。
マーク画 像ファイル
マークライブラリのソケットには、マーク画像を最大 240 枚まで保存できます。マークライブラリは、[Secondary
View]画面に表示されます(詳細は、「[Secondary View]画面」(33ページ)を参照してください)。これらのマーク
は、DispenseMotion コントローラー上の「D:\ever_sr\mark」にファイルとして保存されます。
[Primary View]画面に表示される[Camera]画面と、[Secondary View]画面に表示されるマークライブラリ
画像ソケット(マーク画像が保存されている状態)
空の画像ソケット(画像が保存されていない状態)
マークライブラリ