JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第25页
GVシリーズ 自動ディスペンシングシステム 25 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 シス テム の 電 源 を 入 れ る 塗 布 シ ス テム の コン ポ ー ネ ントを 含 め 、 シス テム の 設 置 が 完 了し た ら 、…

GVシリーズ 自動ディスペンシングシステム
24
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
作業面を準備する
ワークをしっかり固定できるように、ロボットの作業面を準備します。治具用プレートに直接基板を置くことも、カスタマイズし
たフィクスチャープレートを追加することもできます。治具用プレートの詳細については、「治具用プレートの寸法」(111ペー
ジ )を ご 参 照 く だ さ い 。
入力/出力端子を接続する(オプション)
自動ディスペンシングシステムの全機種が、8 つの入力端子と 8 つの出力端子を標準搭載しています。入力/出力配線を、GV
操作ボックスの背面にある I/O Port(入出力ポート)に接続してください。配線図については、「I/O ポート」(114ページ)を
参照してください本システムの入力/出力端子には、複数の使用方法があります。入力/出力の詳細については、「入力/出力を
設定する」(64ページ)を参照してください。

GVシリーズ 自動ディスペンシングシステム
25
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
システムの電源を入れる
塗 布システムのコンポーネントを含め、システムの 設 置が 完了したら、システムの
電源を入れて、設置内容を確認してください。
1. 以下の設置作業が完了していることを確認します。
• 必要なシステムコンポーネントがすべて設置されている(「設 置」
(19ページ)を参照)。
• すべてのシステムコンポーネントが、クイックスタートガイドの 内容
に従って適切に接続されている。
2. DispenseMotion コントローラー、モニター、および GV 操作ボック
スの電 源を入れます。
3. スタート/ストップボックスで:
a. EMERGENCY STOP ボタンが押されていないことを確認します。
b. RUN/TEACH キーを TEACH 位置に回します(プログラムを作
成する際に推奨)。
注記: RUN/TEACH スイッチが TEACH 位置にある場合、システム
は吐出サイクルを実行しますが、液 剤を吐出しません。
4. DispenseMotion アイコンをダブルクリックして、塗布ソフトウェアを
開きます。
5. HOME ボタンをクリックします。
ロボットがカメラをホーム位置(0,0,0)に移動します。これでシステムの準備
は完了です。
6. 塗布システム(バルブコントローラーを含む)を有効にします。必要に応じて、
塗布装置の取扱説明書を参照してください。
7. 以下のセクションを参照してシステムを設定し、用途に応じたプログラムを作
成します。
• 「プログラミングの概要」(26ページ)
• 「DispenseMotion ソフトウェアの概要」(29ページ)
• 「セットアップ」(44ページ)
• 「プログラミング」(69ページ)
スタート/ストップボックス
EMERGENCY
STOP ボタン
START ボタン
RESET ボタン
RUN / TEACH キー
GVシリーズ 自動ディスペンシングシステム
26
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
プログラミングの概要
プログラムの作成を始める前に、本セクションで説明する概要をよく理解してください。
プログラムとコマンドについて
プログラムとは 、ファイルとして保 存されたコマンドの 集まりです。各コマンドは 、番 号 付きアドレスとしてファイルに保 存されま
す。コマンドは、さらに以 下 のコマンドタイプに分けられます。
• セットアップコマンド - XYZ 座標や Z 間隔の高さなど、プログラムレベルのパラメーターを設定します。
• 塗布コマンド - XYZ 座標と関係するコマンドであり、塗布コマンドを実行するための信号を塗布システムに自動送信し
ます。
ロボットはプログラムを実行するときに、各アドレスを順番に読み込み、そのアドレスに含まれるコマンドを実行しま す。アドレ
スにセットアップコマンドが含まれている場合、システムはそのコマンドを登録します。アドレスに塗布コマンドが含まれている
場合は、ロボットはそのコマンドが指定する位置に X 軸、Y 軸、および Z 軸を移動し、塗布コマンドを実行します。
塗布コマンドはパターンの構成要素です。塗布コマンドをプログラムするには、ディスペンスノズルを目的の XYZ 位置に移動
し、その位置で塗布コマンドを登録します。この作業を、目的の塗布パターンが完成するまで繰り返します。下表で例をいくつ
か紹 介します。
セットアップコマンドは、塗布コマンドの実行方法を指定します。プログラムの先頭にセットアップコマンドを挿入することをお
勧めします。最も一般的に使用されるセットアップコマンドは、Backtrack Setup、Dispense Dot Setup、Dispense End
Setup、Line Dispense Setup、Line Speed、およびZ Clearance Setupです。
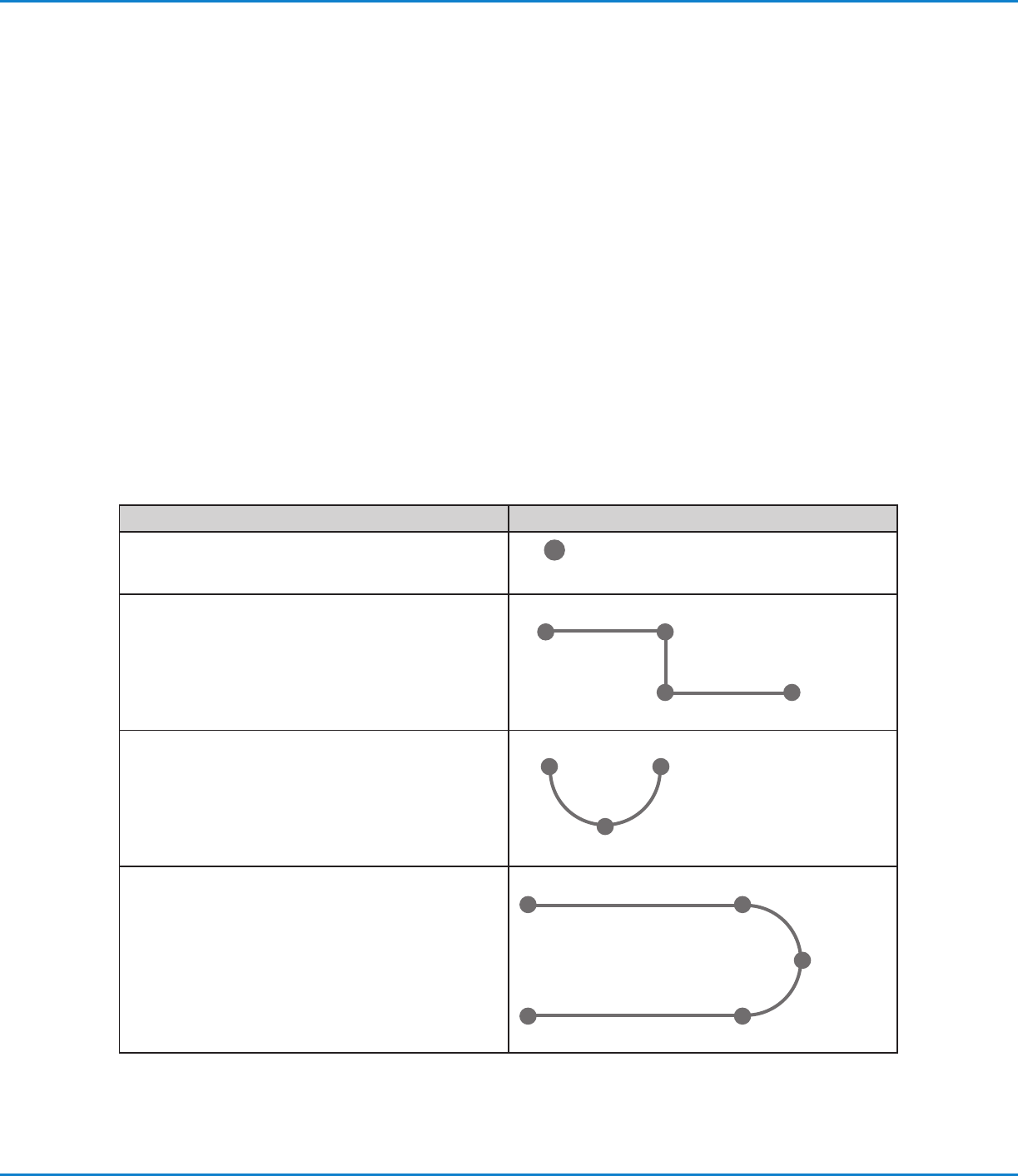
塗布コマンドの例
コマンド 結果として得られるパターン(上から見た図)
液剤を点状に塗布するようにロボットをプログラムする場
合、XYZ 位置を DISPENSE DOT コマンドとして登録し
ます。
Dispense Dot
液剤を直線状に塗布するようにロボットをプログラムする
場合、直線の始点の XYZ 位置をLINE START コマンドと
して登録します。ノズルが進行方向を変える位置は、LINE
PASSING コマンドとして登録します。液剤の塗布を終了す
る位置は、LINE END コマンドとして登録します。
Line Start
Line EndLine Passing
Line Passing
液剤を円弧状に塗布する場合、塗布の始点の XYZ 位置
をLINE START コマンドとして登録します。円弧の頂点
は、ARC POINT コマンドとして登録します。円弧の終点
は、LINE END コマンドとして登録します。
Arc Point
Line Start
Line End
直線と円弧を組み合わせて、複雑な経路に沿って液剤を塗
布することもできます。
Line Start
Line End
Arc Point
Line Passing
Line Passing