JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第39页
GVシリーズ 自動ディスペンシングシステム 39 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 [System Setup]画面 [System Setup]画面 を 表示 す る に は、 [System Setup]タ ブ を ク リ ッ ク …
GVシリーズ 自動ディスペンシングシステム
38
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
ビュー2
フィー
ルド
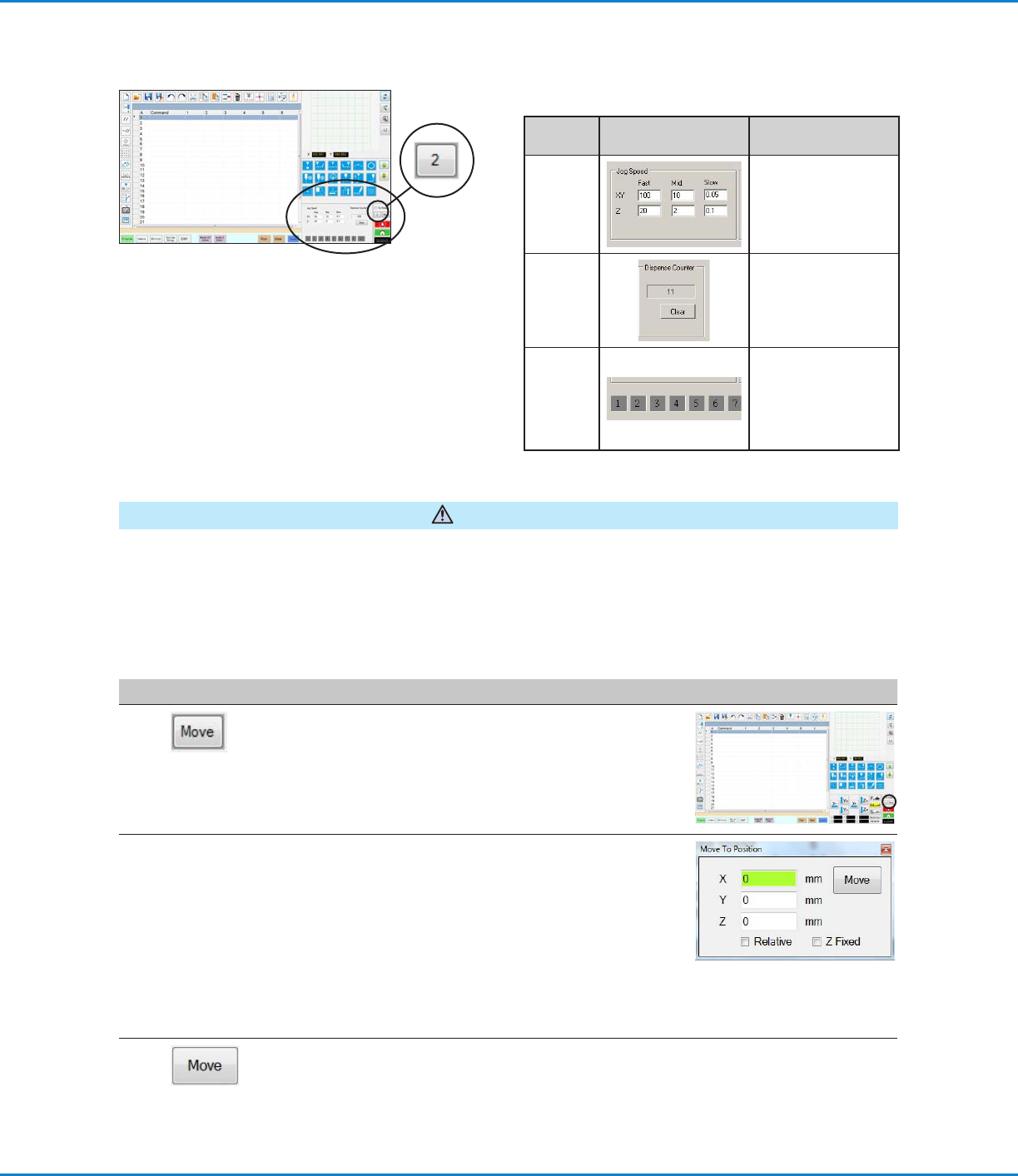
画面領域 機能
Jog
Speed
キーボードで値を入力
することで、ジョグ速
度の設定を変更でき
ます。
Dispense
Counter
吐出動作の回数を表示
します。カウンターを
ゼロ(0)にリセット
するには、[CLEAR]を
クリックします。
Output
Trigger
出力番号をクリックす
ることで、接続されて
いる出力をトリガーで
きます。赤は出力が
[ON]であることを
示します。
ナビゲーション&ジョグウィンドウ (続き)
ナビゲーション&ジョグウィンドウのビュー2
注意
機器の破損のリスク。 ノズルを特定の場所に移動するときは、特にZ軸の場合、軸の制限([System Setup] > [Axis Limits]
で指定)を超えないようにしてください。 これを行うと、ロボットが破損したり、ノズルが基板と衝突したりする可能性がありま
す。
ノズルを特定の場所に移動する方法
ジョグウィンドウの[Move]ボタンを使用すると、ノズルを特定の座標セットに移動できます。
# クリック 手順 参考画像
1
• ジョグウィンドウで、[MOVE]をクリックします。
[Move to Position]ウィンドウが開きます。
2 • 目標とする座標を入力します。 必要に応じて、次
のチェックボックスを選択または選択解除しま
す。
- Relative: 選択すると、ノズルは現在の位置を
基準にして、入力された座標に移動します。 選
択解除すると、ノズルはホーム位置(0, 0, 0)に
基づいて、入力された座 標に移 動します。
- Z Fixed: 選択すると、Z軸がロックアウトさ
れ、X座標とY座標のみを入力できるようにな
ります。
3 • [MOVE]をクリックします。
ノズルが、指定された位置に移動します。
• ウィンドウを閉じます。
GVシリーズ 自動ディスペンシングシステム
39
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
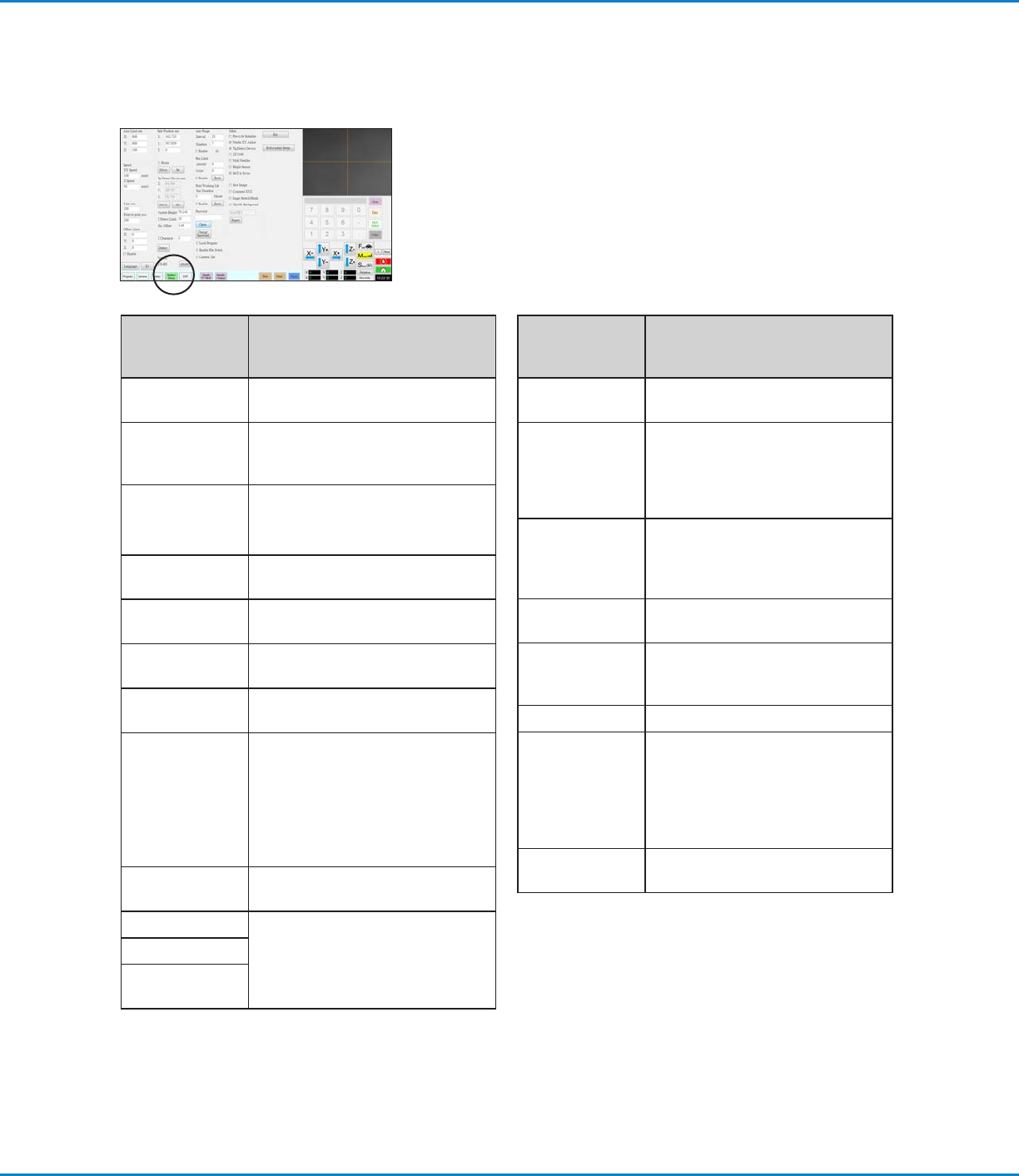
[System Setup]画面
[System Setup]画面を表示するには、[System Setup]タブをクリックします。この画面には各システム設定のフィールドが
あります。また、この画面から[Robot Initial Setup]ウィザードにアクセスできます。各フィールドの詳細については、本書の
該当するセクション(下表に記載)を参照してください。
[System
Setup]
画面の各領域
能
Axis Limit 「システムパラメーターを設 定する」
(44ページ)を参照してください。
Speed (Point
to point
speed)
「システムパラメーターを設 定する」
(44ページ)を参照してください。
Line Acc
Point to point
Acc
「システムパラメーターを設 定する」
(44ページ)を参照してください。
Oset Alarm 「システムパラメーターを設 定する」
(44ページ)を参照してください。
Language 「システムパラメーターを設 定する」
(44ページ)を参照してください。
IO 「入力/出力を設定する」(64ペー
ジ )を 参 照 し て く だ さ い 。
Park Position 「システムパラメーターを設 定する」
(44ページ)を参照してください。
Tip Detect
Device
[Robot Initial Setup]ウィザードを
使 用 せ ず に 、ノ ズ ル - ワ ー ク 間 の オ フ
セットを 手 動 で キャリブレー ションす
る必要がある場合のみ使用します。「
付録B:ウィザードを使用しない場合
の設定手順」(147ページ)を参照し
てください 。
Version ソフトウェアの現在のバージョンを
表 示します。
Auto Purge 「 自 動 パ ー ジ 、プ ロ グ ラ ム サ イ ク ル の
制限、および液剤の使用可能時間の
設定方法」(91ページ)を参照してく
ださい。
Run Limit
Fluid Working
Life
[System
Setup]
画面の各領域
能
Password 「パスワード保護を設定する」
(51ページ)を参照してください。
Lock Program
Enable File
Switch
Camera Tab
「プログラムのロック/ロック解除 方
法」(71ページ)を参照してください。
Other さまざまなシステムレベルの設定を
有効または無効にできます。 詳細に
ついては、「Other」(46ページ)を参
照してください 。
[Model]ドロップ
ダウンメニュー
ロボットの機種を指定します。
Expert 上 級ユーザー 専 用です。「エキスパー
ト設定を表示する」(48ページ)を参
照ください 。
Exit ソフトウェアを閉じます。
Robot Initial
Setup
システムの 設 定とキャリブレーショ
ンを行うウィザードを開きます。シス
テムの設定手順については、「システ
ムの設定とキャリブレーションを行
う(必須)」(52ページ)を参照してく
ださい。
Light
(ある場合)
「システムパラメーターの設定」(44
ページ)を参照してください。
GVシリーズ 自動ディスペンシングシステム
40
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
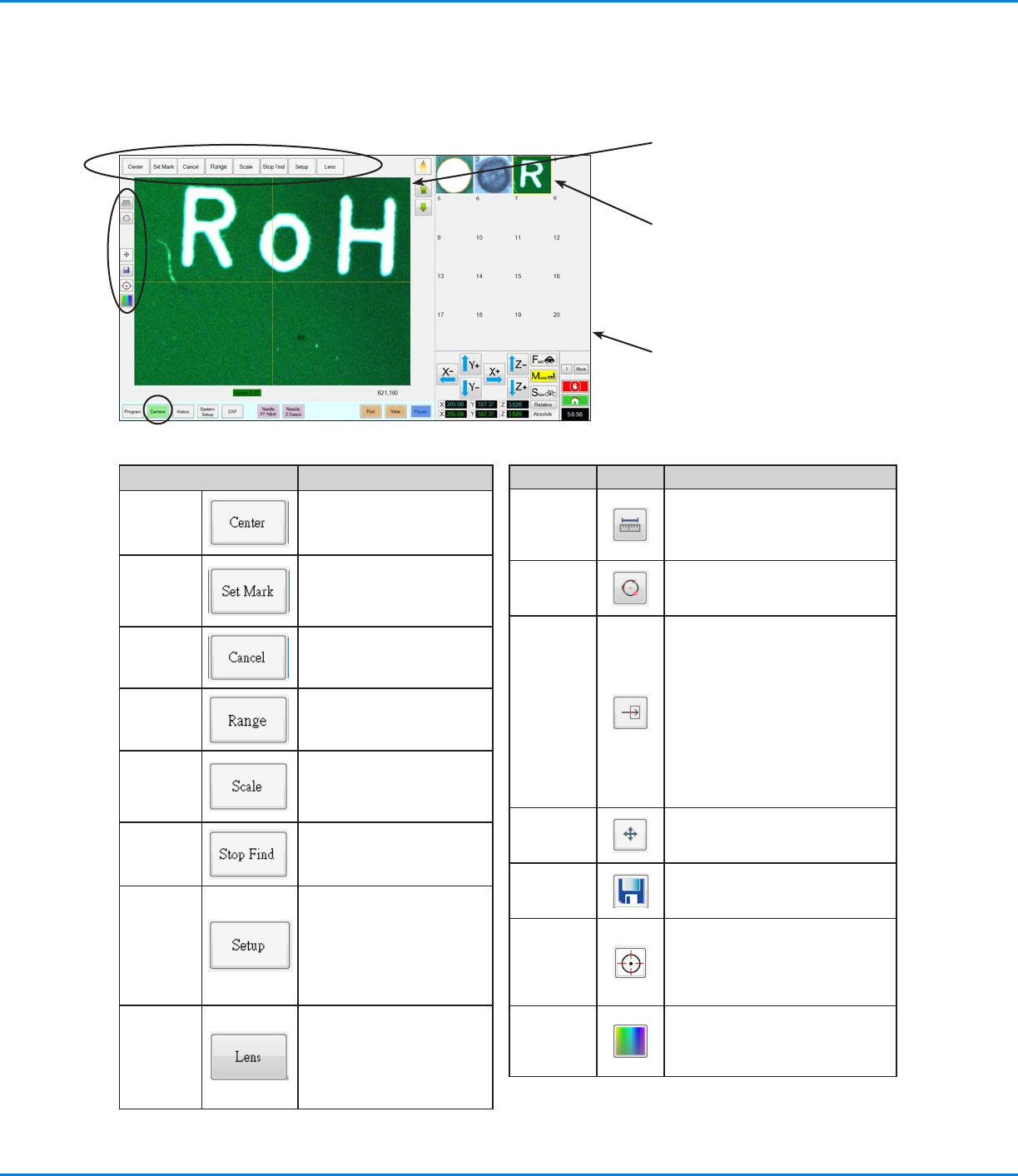
[Camera]画面、タブバー、およびアイコン
[Camera]タブをクリックすると、[Camera]画面が表示されます。[Primary View]画面にはカメラが実際に映しているもの
が表示され、[Secondary View]画面にはマークライブラリが表示されます。[Camera]画面の上部にあるタブは、カメラの
設定とマークの作成に使用します。
[Camera]画面のタブ 機能
Center
カメラの焦点を対象物の中心
に移動します。
Set Mark
マークを設定します。「マー
クについて」(28ページ)と
「マークの作成方法」(77ペ
ージ)を参照してください。
Cancel
最後に行ったカメラ関連の操
作を取り消します。
Range
システムがマークを探索する
範囲を設定します。
Scale
カメラ視野のスケールに合わ
せて画面のスケールを変更
します。(セットアップ時
のみ)
Stop Find
マークの検出を停止します。
Setup
[Camera Setup]ウィンドウ
を開きます。このウィンドウ
では、カメラ関連の重要な
設定フィールドを使用でき
ます。「[Camera Setup]画
面」(43ページ)を参照して
ください。
Lens
[Camera Properties]ウィ
ンドウを開きます。 詳細
については、「[Camera
Properties]ウィンドウ」
(41ページ)を参照してく
ださい。
アイコン名 アイコン 機能
Measure
Length
2つのポイントの間の距離を測定し
ます。「ワーク上の経路または円の
測定方法」(72ページ)を参照して
ください。
Measure
Circle
Diameter
円の直径を測定します。「ワーク上
の経路または円の測定方法」(72ペ
ージ)を参照してください。
Arrow
オプションのOptiSure
™
アドオンソ
フトウェアを使用して、塗布量を確
認するための高度な機能にアクセス
します。このアイコンは、OptiSure
アドオンのロックが解除されている
場合にのみ有効になります。
OptiSureキットのパーツ番号につい
ては、「OptiSureソフトウェア」
(108ページ)を参照してくださ
い。操作手順については、OptiSure
のマニュアルを参照してください。
Touch
Move
切り替えると、クリックしたポイン
トにカメラを移動し、表示画面の中
心に焦点を移動します。
Save
表示されているカメラ画像をビット
マップ(*.bmp)ファイルとして保
存します。
CCD Focus
ロボットの初期設定(ステップ5また
は6)で設定された、または([Oset]
の) [Camera Setup]ウィンドウで
定義されたフォーカス位置にZ軸を
自動的に移動します。
Color
Select
カメラの十字線(センタークロスラ
イン)と基準円の色を設定します。
第4角度はRVシリーズシステムにの
み適用されます。
[Camera] タブ を選 択 する と 、
[Primary View]画面にカメラが実際に映
しているものが 表 示 されます。
[Camera]タブを選択すると、[Secondary
View]画面にマークライブラリが表示され
ます。
任意の画像を右クリックし、 [PROPERTY]
を選択して[Template Match]ウィンドウ
を 開 き ま す 。こ の ウ ィ ン ド ウ の 詳 細 に つ い
ては、「[Template Match]ウィンドウと
[Area]ウィンドウ」(42ページ)を参照して
ください 。