JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第44页
GVシリーズ 自動ディスペンシングシステム 44 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 セ ット ア ッ プ 設置後、 プ ロ グ ラ ム の作成 を 開始 す る 前に 、 以下 の 必須お よ び任意 の設定手順 を 、 ご使 用 の …
GVシリーズ 自動ディスペンシングシステム
43
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
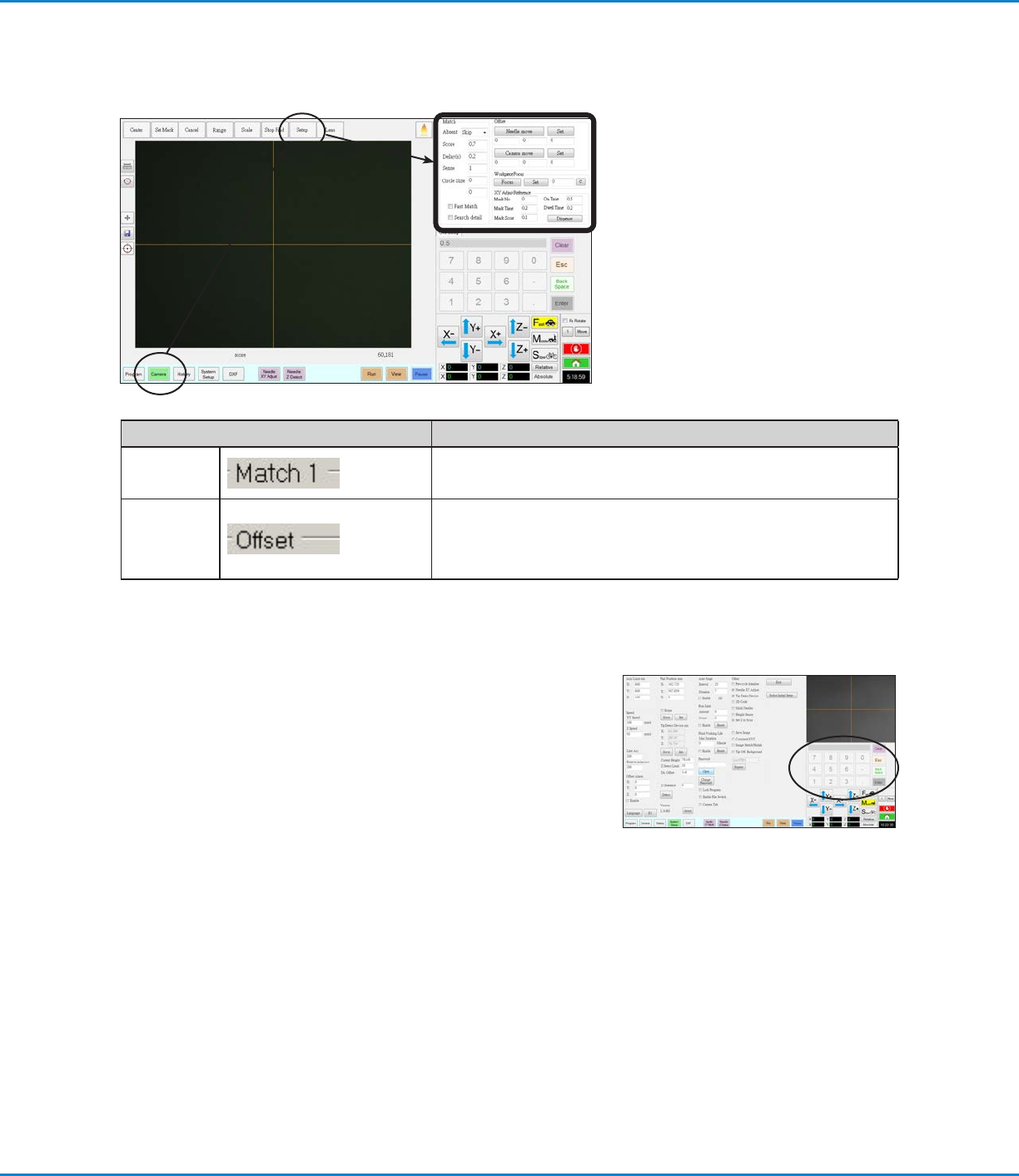
[Camera Setup]画面
[Camera] > [Setup]タブをクリックすると、カメラ設定フィールドが表示されます。カメラが実際に映しているものは
[Primary View]画面に表示され、各カメラ設定フィールドは[Secondary View]画面に表示されます。
[Camera]画面の設定ウィンドウの各部 機能
Match
カメラによるマークの探索方法に関係する設定です。「マークの検出方法
を設定する(任意)」(65ページ)を参照してください。
Oset
[Robot Initial Setup]ウィザードを使用せずに、ノズルカメラ間のオフ
セットを手動でキャリブレーションする必要がある場合のみ使用します。
「付録B:ウィザードを使用しない場合の設定手順」(147ページ)を参
照してください 。
キ ー パッド
データ入力フィールドがあるときには、数値キーパッド(テンキー)が表示さ
れます。キーボードの数字キーを使用する代わりに、キーパッドをマウスでク
リックして、数値を入力することができます。数字の入力方法に関係なく、シス
テムで入力を受け入れるには、(キーパッドまたはキーボードの) Enterキー
を使 用してください 。
GVシリーズ 自動ディスペンシングシステム
44
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
セットアップ
設置後、プログラムの作成を開始する前に、以下の必須および任意の設定手順を、ご使用の自動ディスペンシングシステムに
応じて実行してください。
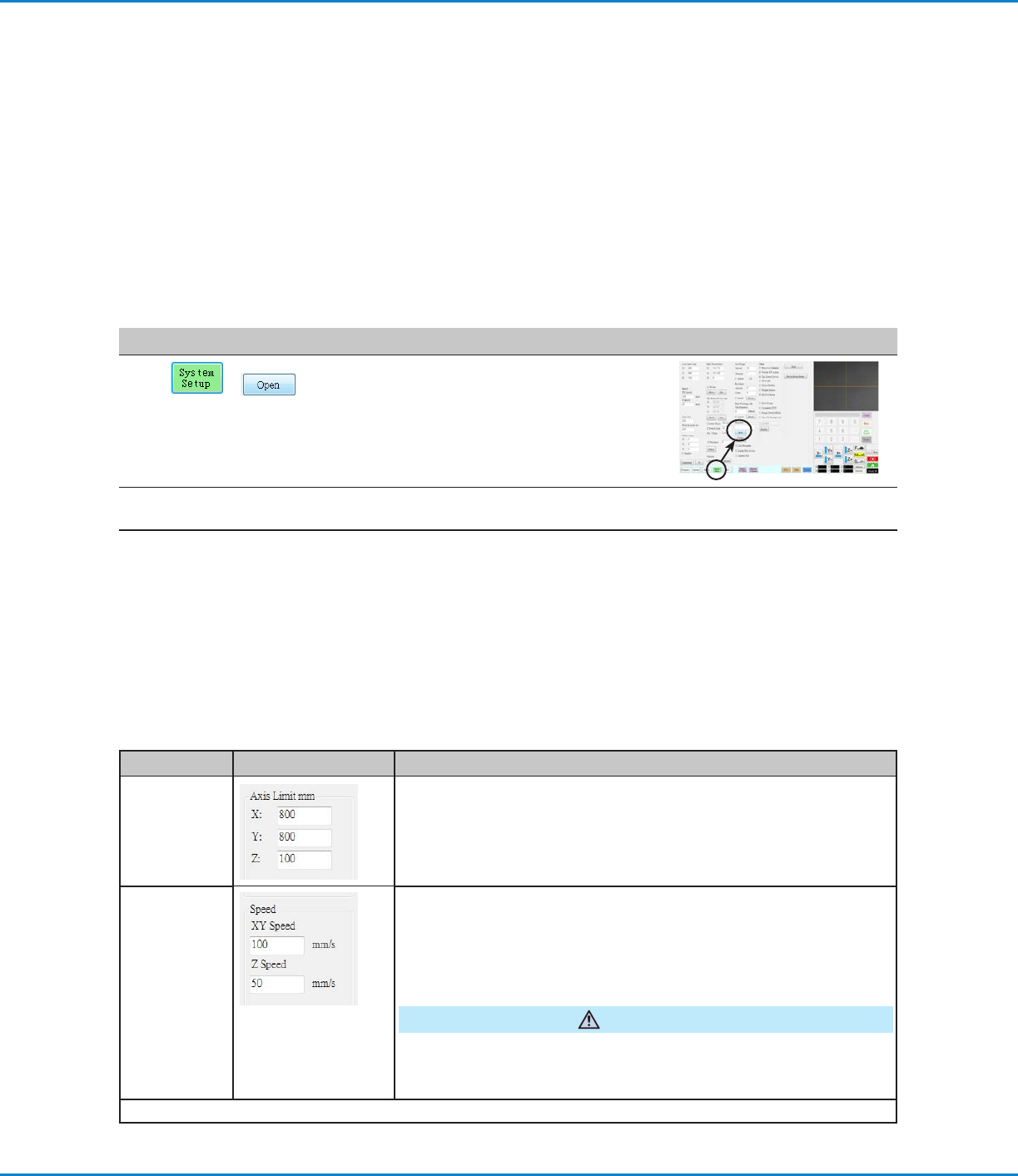
[System Setup]画面のフィールド
注 記: デフォルト値は、選択したロボットモデルによって異なる場 合があります。
項目 画面キャプチャ 説明
Axis Limit
ロボットが移動できる範囲制限を設定します。 デフォルト設定より高い値を入
力することはできません。
Speed (Point
to point
speed)
ポイントからポイントへの軸の移動速度を設定します。最高速度の仕様につい
ては、「仕様」(13ページ)を参照してください。
注 記: ナビゲーション&ジョグウィンドウの横にある[2]をクリックして、ジョグ
速度の設定値を変更することもできます。詳細については、「ナビゲーション&
ジョグウィンドウ」(37ページ)を参照してください。
注意
ロボットは、パターンの複雑さに応じて速度を自動的に調整します。ロボットを
無理に高速で稼働させると、精度が下がり、システムの運用に支障をきたすおそ
れがあります。
次ページに続く
システムパラメーターを設 定する
工場出荷時に、ほとんどの用途に適したシステム設定が行われています。以下の手順は、必要に応じてシステム設定を表示し
たり、変更したりするときに実行してください。重要なシステム設定項目には、以下のものがあります。
• Speed:ノズルがポイントからポイントへ移動する速度を設定する方法。
• Line Acc:あるポイントから別のポイントへロボットを加速する方法。
ポイント間の移動におけるロボットの加速方法
#
クリック 手順 参考画像
1
>
• [System Setup]タブをクリックしてか
ら、[Open]をクリックします。
2
• パラメーターを確認するか、用途に合わせて変更します。システムレベルのパラメー
ターについては、以下の「[System Setup]画面のフィールド」を参照してください。
3
• 他のタブをクリックして[System Setup]画面を閉じます。
注 記: [Model]と[Language]の選択内容を除き、設定は自動的に保存されま
す。[Model]と[Language] の変更は、DispenseMotion ソフトウェアを閉じ、再度
開いたときに有 効になります。
GVシリーズ 自動ディスペンシングシステム
45
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
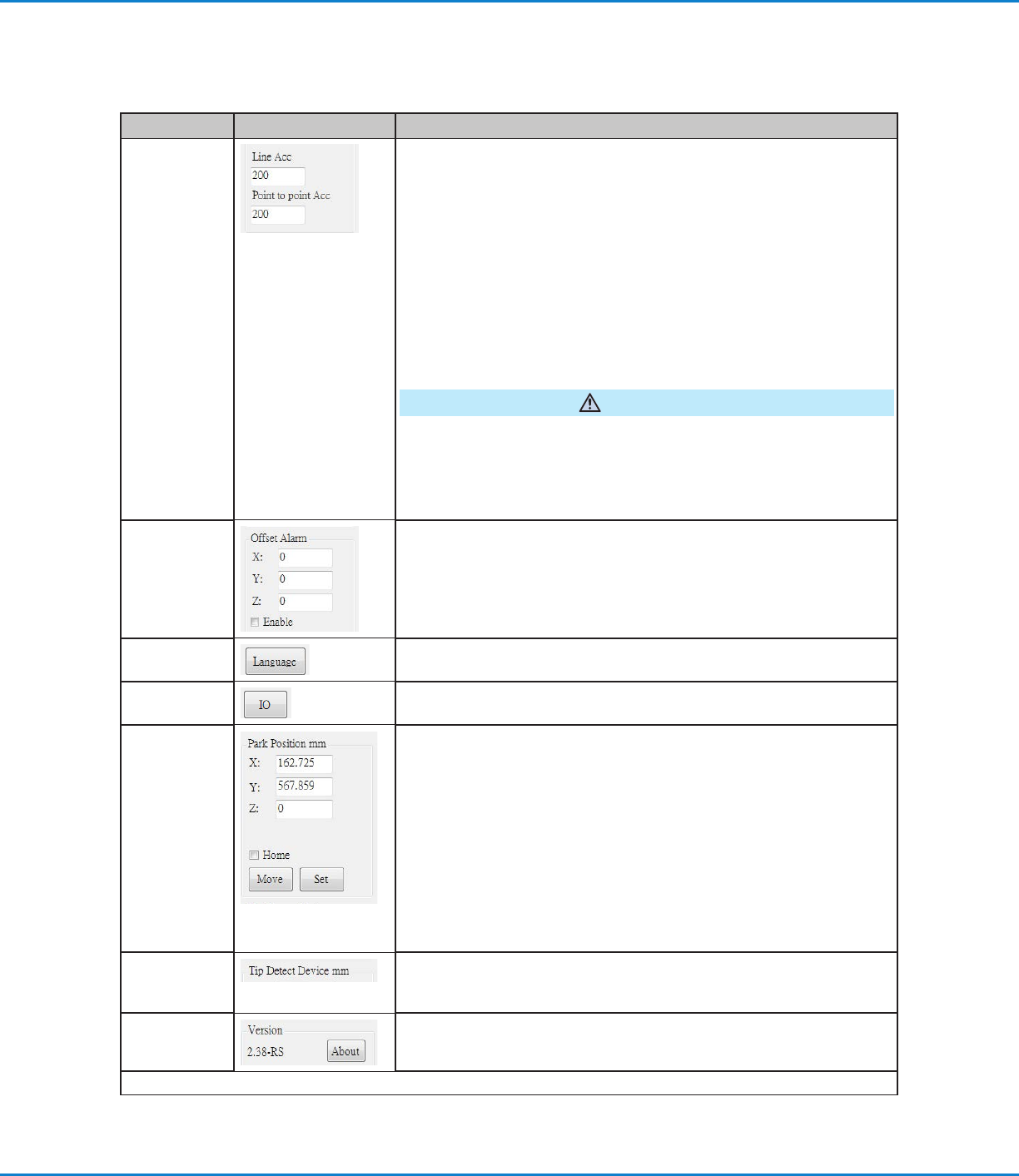
項目 画面キャプチャ 説明
Line Acc
Point to
point Acc
線状塗布(Line Acc)またはポイント間の移動(Point to point Acc)の加速
度を設 定します。
• Line Acc は、ラインコマンド内での開始点から中間点、開始点から終点、
中間点から中間点、または中間点から終点の間の塗布速度です。
• Point to point Acc は、2つの塗布ポイントの間をロボットが移動する
速 度です。
初期値: 200 (mm/s
2
)
範囲: 20–600 (mm/s
2
)
注 記: 加速度が大きければ大きいほど、プログラムの実行速度が速くなりま
す。ただし、加速度の設定値を大きくすると、パターンの品質が低下する可能性
もあります。
注意
ラインAccおよびポイント間Accは、各ロボットモデルおよびサイズごとに工場
出荷時に設定されています。ノードソンEFDは、これらの値を変更しないことを
強く推奨します。代わりに、EFDは、サイクルタイムを増加/減少させるために、ラ
インスピード(プログラムタブ)またはポイント間スピード(システムセットアップ
タブの「スピード」)を調整することを推奨します。
Oset Alarm
オフセットからどの程度逸脱できるかを設定します。デフォルト設定は画面キャ
プチャのとおりです。
例: [Oset Alarm]が有効の状態で、[Needle Z Detect]または[Needle
XYAdjust]をクリックして実行した自動オフセットの結果が[Oset Alarm]
で指定された XYZ 値の範囲外になった場合、アラームが表示されます。
Language
ユーザーインターフェースの言語を設定します。システムを再起動すると、変更
が有 効になります。
IO
「入力/出力を設定する」(64ページ)を参照してください。
Park Position (1)液剤をパージするとき、または(2)プログラムで Park Position コマンド
が実行されたときに、ディスペンスノズルを移動する位置を設定します。
[Move]をクリックすると、[Park Position]で設定した表示座標にノズルが
移動します。設定を変更するには、ノズルを新しい位置にジョグ送りしてから
[SET] をクリックすることで、その位置を新しいパーク位置として設定します。
ホームがチェックされており、プレサイクルイニシャライズ(その他の項目)がチ
ェックされていない場合、ロボットは[HOME]をクリックするたびにホーム位
置に移動し、その後パーク位置に移動します。
ホームとプレサイクルイニシャライズの両方がチェックされている場合、ロボッ
トはディスペンスプログラムの開始時にホーム位置に移動し、ディスペンスプロ
グラムの終了時にパーク位置に移動します。
Tip Detect
Device
[Robot Initial Setup]ウィザードを使用せずに、ノズル-ワーク間のオフセット
を手動でキャリブレーションする必要がある場合のみ使用します。「付録B:ウ
ィザードを使用しない場合の設定手順」(147ページ)を参照してください。
Version
ソフトウェアの現 在のバージョンを表 示します。
次ページに続く
システムパラメーターを設定する(続き)
[System Setup]画面のフィールド(続き)