JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第63页
GVシリーズ 自動ディスペンシングシステム 63 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 ロ ボッ トの 機 種 を 変 更 す る シ ス テ ム が正常に 動作す る た め に は、 正 し い ロ ボ ッ ト の 機種 を 選択 す …
GVシリーズ 自動ディスペンシングシステム
62
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
Needle Z DetectまたはNeedle XY Adjustへのシステムの応答
注 記:
• ニードル Z 検知またはニードル XY 調整後に、システムが自動的にオフセットを更新するかどうかを 選択できます。詳細に
ついては、67ページの「システムがオフセットを更新するかどうかの設定」を参照してください。
• オプションのノズル検知器を搭載したシステムの場合は、[Needle XY Adjust]ボタンと[Needle Z Detect]ボタンの両
方が表示されます。オプションのノズル検知器を搭載していないシステムの場合は、[Needle XY Adjust]ボタンのみ表示
されます。
[Needle Z Detect]をクリックすると、システムは以下の動作を行います。
• ノズル検知 器のセンサーの上にディスペンスノズルを移 動し、センサーに触れるまでディスペンスノズルを下げます。
• 前回の測定値と現在の測定値の差を測定し、比較します。
• ノズル-ワーク間のオフセット(Z間隔)の変更の確認を要請します。
• 現在開いているプログラムの全てのポイントを、最新のノズル-ワーク間のオフセット(Z間隔)に揃え直します。
• Needle XY Adjustシーケンスを自動的に実行します(後述)。.
[Needle XY Adjust]をクリックすると、システムは以下の動作を行います。
• ディスペンスノズルをワーク上のあらかじめ設定された位 置に移 動します。
• 液剤を一滴塗布します。
• 塗布したドットの上にカメラを移動します。
• ドットの配置をマークライブラリに保存されているマーク画像と比較します。
注記:システムがマーク画像を見つけられない場合、取るべきアクションを求めるプロンプトが表示されます: [再検索]、
[検索停止]、または[手動]。
• カメラ-ノズル間のオフセット(XYオフセット)の変更の確認を要請します。
• 現在開いているプログラムのすべてのポイントを、新しいXYオフセットに揃え直します。
(ノズル検知器非搭載のシステムのみ)システムの設定とキャリブレーションをテストする
# クリック 手順
1
ノズル検知器非搭載のシステムのみ:
• [Needle XY Adjust]をクリックして、設定をテストします。
• 確認メッセージが表示されたら、[Yes]/[OK]をクリックします。
[Needle XY Adjust]を選択した場合のシステムの応答の詳細については、
「Needle Z DetectまたはNeedle XY Adjustへのシステムの応答」(63ページ)
を参 照してください 。
以上で、システムの設定とキャリブレーションは完了です。プログラムの作成につい
ては、「プログラミング」(69ページ)を参照してください。
GVシリーズ 自動ディスペンシングシステム
63
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
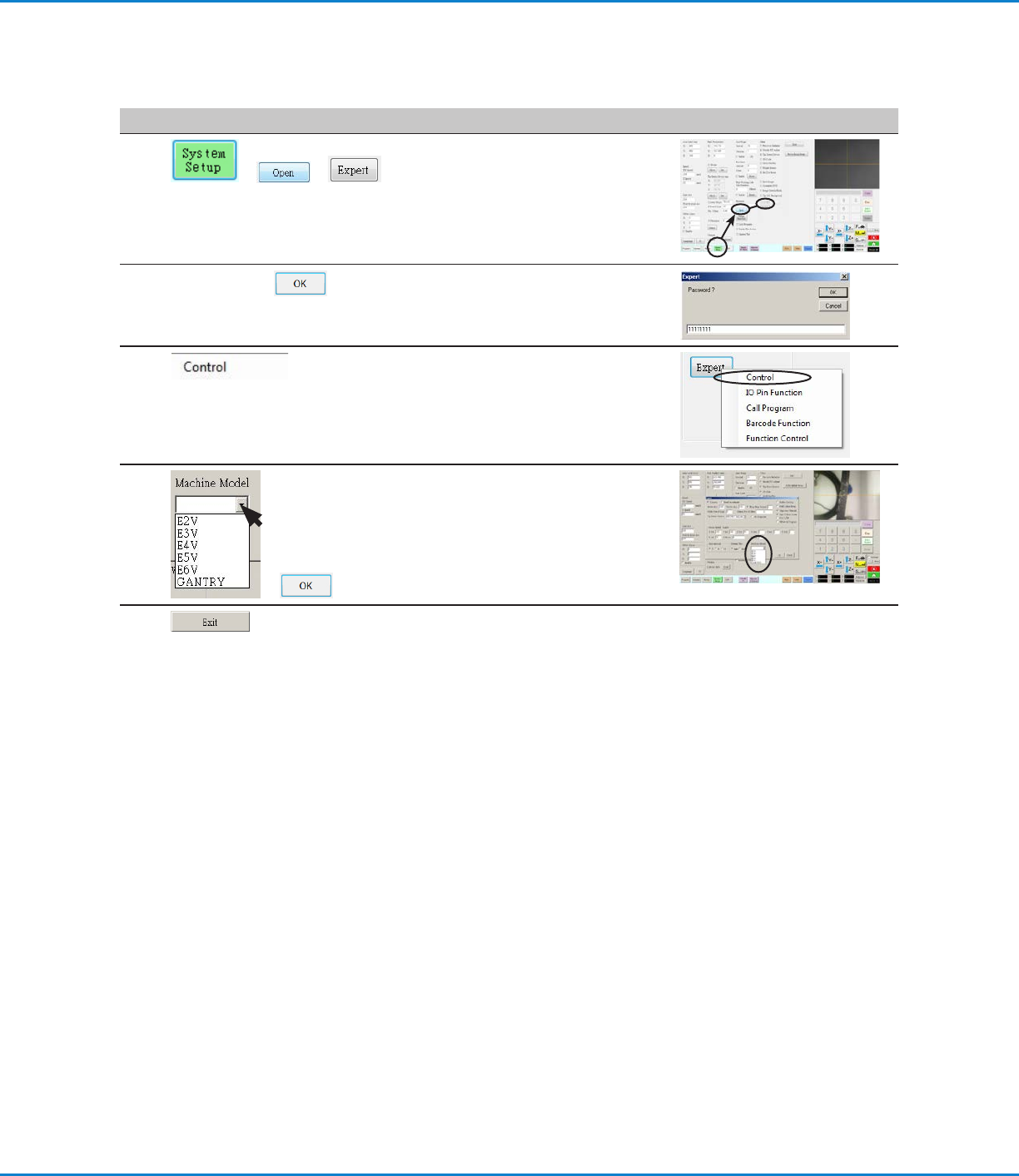
ロボットの機種を変更する
システムが正常に動作するためには、正しいロボットの機種を選択する必要があります。必要に応じて、以下の手順でロボット
の機種を変更してください。
# クリック 手順 参考画像
1
> >
• [System Setup] > [Open] >
[Expert]の順にクリックします。
2
11111111 >
• 「11111111」と入力し、[OK]をクリッ
クします。
3 • [CONTROL]をクリックします。
4
>
• [Machine Model]ドロップダウンメニ
ューから正しいロボットの機種を選択し
ます。
• [OK]をクリックして保存します。
5
• [EXIT]をクリックしてソフトウェアを閉
じます。
• ロ ボットを オフにします。
• DispenseMotionソフトウェアを再度
開き、ロボットをオンにして変更を有効
にします。

GVシリーズ 自動ディスペンシングシステム
64
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
入力/出力を設定する
ロボット背面にある I/O ポートに入出力を接続します。詳細は 「I/O ポート」(114ページ)と 「入出力接続例」(116ページ)
を参 照してください 。
エキスパート制御メニューからアクセス可能な IO ピン機能ウィンドウを使用して、各入出力を設定します。詳細は 「付録I:入
出力ピン機能の設定」(174ページ)を参照してください。
接続された入出力のステータスを表示したり、出力の ON/OFF を切り替えるには、以下の手順に従います。
注 記: 自動ディスペンシングシステムの全機種が、8つの入力端子と8つの出力端子を標準搭載しています。16 の入力と 16
の出力に拡張するキットが使用可能です。 「I/O拡張キット」(107ページ)を参照してください。
入出力のステータスを表示する
前提条件
システムが適切に設置・設定されていること。「設置」(19ページ)と「セットアップ」(44ページ)を参照してください。
入力/出力配線が適切に接続されていること。配線図については、「入出力ポート」(114ページ)を参照してください。
# クリック 手順
1
>
• [System Setup] > [IO]の順にクリックします。
2
マシン IO ウィンドウには、接続された入力 / 出力と、その ON / OFF ステータスが
表 示されます。
• オンまた はオフにする出 力をクリックし 、[ X ] をクリックしてウィンドウを閉じます。
注 記:
• 入力/出力1〜8のみを使用してください。それ以外の入力/出力は、システム用に予
約されています。
• ON / OFF できるのは出力のみです。
• 入力が ON のときは赤く点滅します。
• 入力 9, 10, 11 は X, Y, Z ホームセンサーです。
• 入力18は、ノズル検知器です。