JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第37页
GVシリーズ 自動ディスペンシングシステム 37 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 ナ ビゲ ー シ ョンと ジ ョ グ ウィン ドウ ナビゲ ー ションお よび ジョグ ウィ ンドウの ア イコンを 使 用 し て、 ノズ ル を 移…
GVシリーズ 自動ディスペンシングシステム
36
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
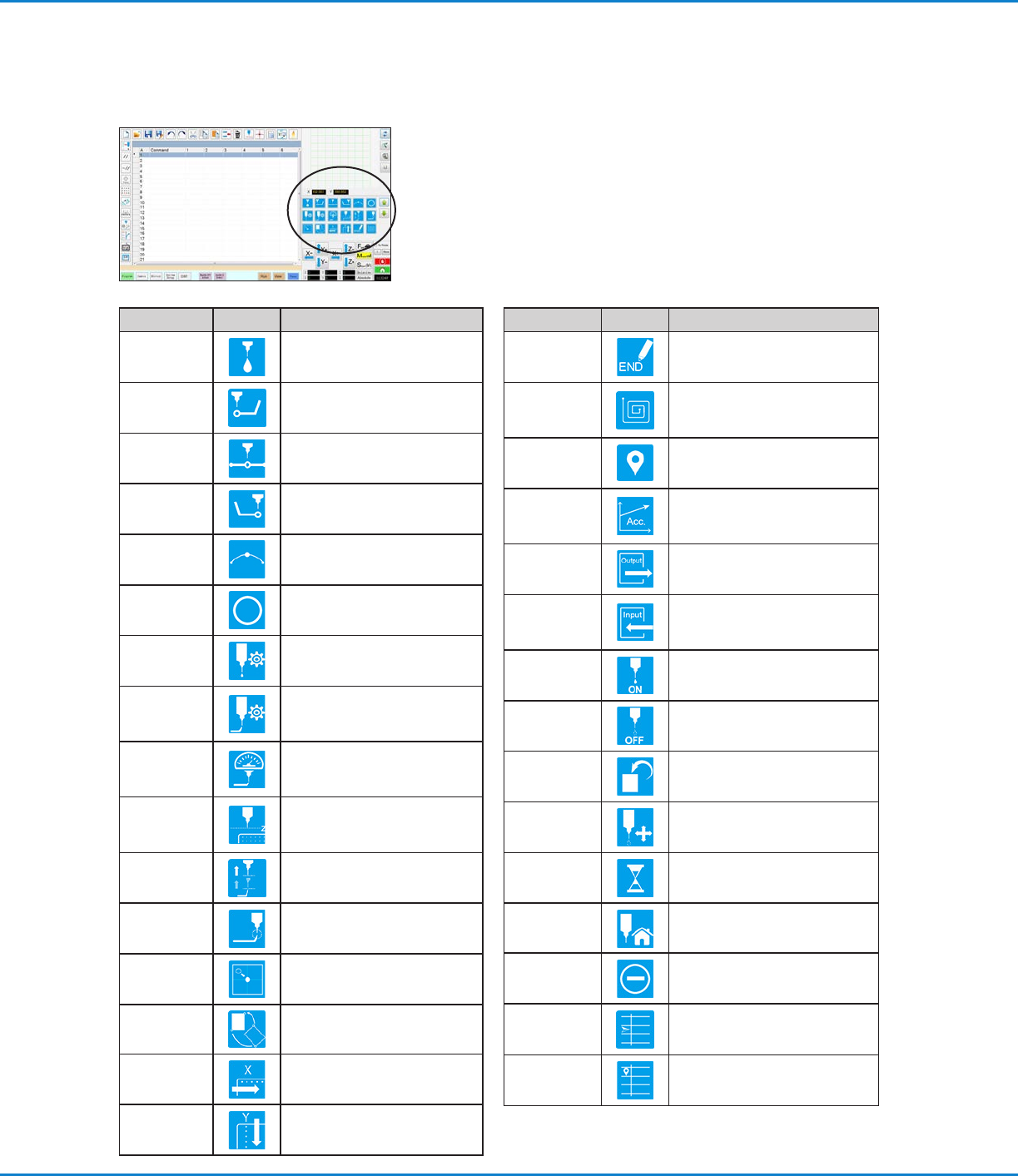
セットアップコマンドアイコンと塗布コマンドアイコン
プログラムの番号付きアドレスに関連するコマンドを入力するには、塗布コマンドとセットアップコマンドのアイコンをクリック
します。アイコンリストを上または下に移動するには、緑色の矢印を使用します。すべてのコマンドに関する詳細については、「
付録A:コマンド機能リファレンス」(117ページ)を参照してください。
アイコン名 アイコン 機能
End
Program
プログラムを終了します
Fill Area
[Fill Area]パラメータの設定に
従って、特定のエリアに塗布し
ます
Label
プログラムの指定された位置の
ラベルを登録します
Acceleration
ポイントからポイントへ、また
は連続する軌道に沿ってロボッ
トを加速する方法を変更します
Output
選択した出力信号をロボットか
ら送信します
Input
選択した入力チャネルからの入
力信号をチェックするようロボ
ットに指示します
Dispenser
On
塗布を有効化します
Dispenser
O
ラインコマンドのみディスペン
サーを無効にする
Initialize
保存された訂正データをリセッ
トします
Dummy
Point
現在の位置をダミーポイントと
して登録します
Wait Point
現在の位置を待機ポイントとし
て登録します
Park
ロボットを一時停止位置に送り
ます
Stop Point
現在の位置を停止ポイントとし
て登録します
Goto
Address
プログラム内の指定したアドレ
ス番号までスキップします
Goto Label
プログラム内の指定したラベル
までスキップします
アイコン名 アイコン 機能
Dispense
Dot
現在の位置を、Dispense Dot
ポイントとして登録します
Line Start
現在の位置をLine Startポイン
トとして登録します
Line
Passing
現在の位置をLine Passingポイ
ントとして登録します
Line End
現在の位置をLine Endポイン
トとして登録します
Arc Point
現在の位置をArc Pointとして
登録します
Circle
現在の位置をCircleとして登録
します
Dispense
Dot Setup
Dispense Dotパラメータを設
定します
Line
Dispense
Setup
線状塗布パラメータを設定し
ます
Line Speed
線の速度を設定します(デフ
ォルトの速度設定は上書きさ
れます)
Z Clearance
Setup
Z間隔を設定します(デフォル
トのZ間隔設定は上書きされ
ます)
Dispense
End Setup
塗布後のノズル上昇の速度と高
さを設定します
Backtrack
Setup
塗布後にノズルを元の位置に戻
す方法を設定します
Find Mark
検索マークを登録します
Fiducial
Mark
フィデューシャルマークを登録
します(2個必要です)
Step &
Repeat X
Step & Repeat Xパラメータ
を設定します
Step &
Repeat Y
Step & Repeat Yパラメータ
を設定します
GVシリーズ 自動ディスペンシングシステム
37
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
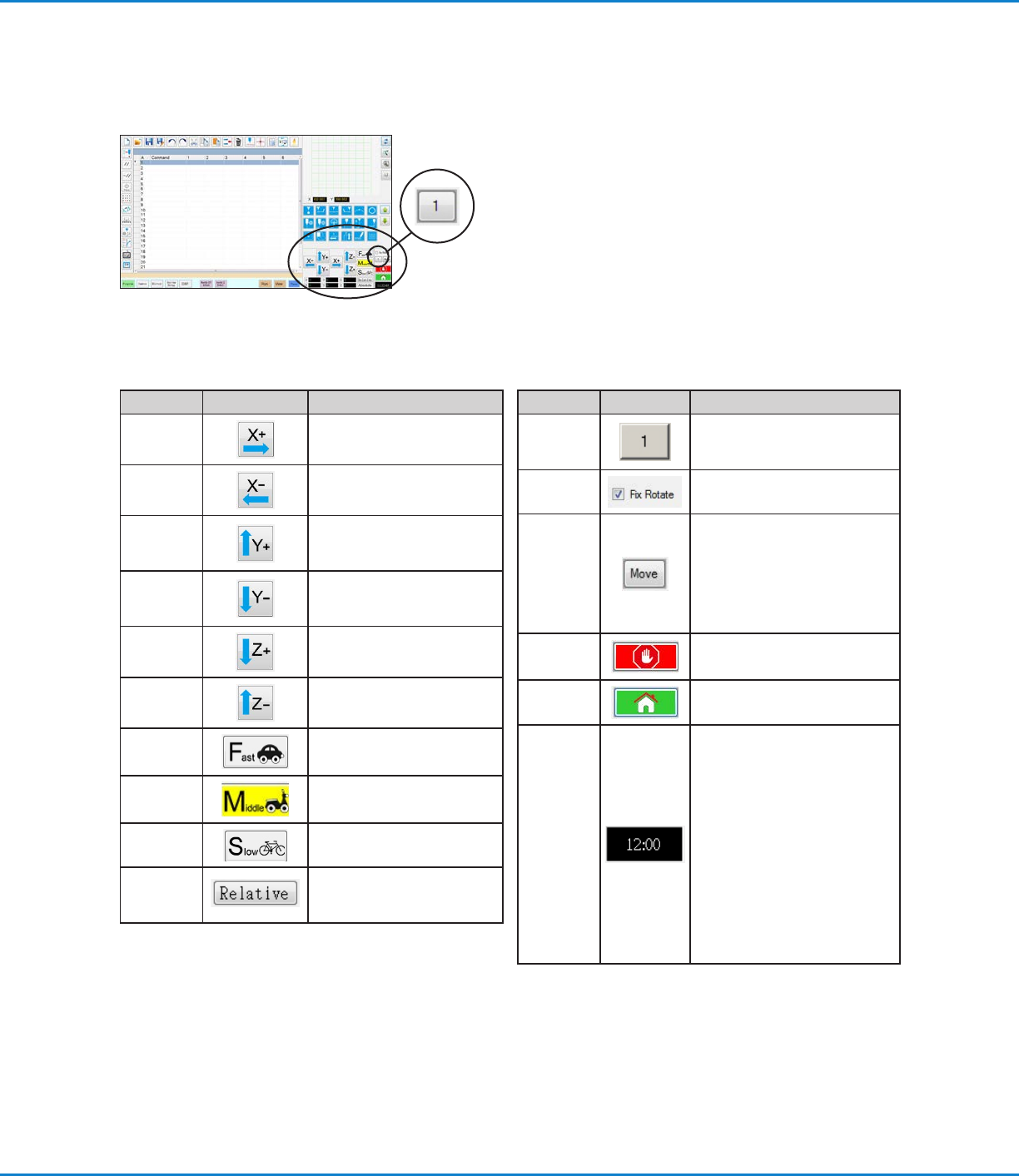
ナビゲーションとジョグウィンドウ
ナビゲーションおよびジョグウィンドウのアイコンを使用して、ノズルを移動します。 ボタン1をクリックして、ジョグ速 度の値を
変更できる別のビューのウィンドウに変更します。 これらのウィンドウには実際の、時間/サイクルタイム、ディスペンス作動カ
ウンター、および座標値を表示するウィンドウも含まれています。
ビュー1
アイコン名 アイコン 機能
X+
X 軸を右方向にジョグ送りし
ます。
X-
X 軸を左方向にジョグ送りし
ます。
Y+
Y軸を後方にジョグします(
治具用プレートを前方に移動
させる)
Y-
Y軸を前方にジョグします(
治具用プレートを後方に移動
させる)
Z+
Z 軸を下方向にジョグ送りし
ます。
Z-
Z 軸を上方向にジョグ送りし
ます。
Fast
最も速い移動速度
Middle 中間の移動速度
Slow 最も遅い移動速度
Relative
塗布対象基材の座標と相対的
に原点を設定します。ボタン
の横に座標が表示されます。
両方のビュー
アイコン名 アイコン 機能
ジョグボ
タン切り
替え
ナビゲーション&ジョグウィン
ドウのビュー1 とビュー2 を切
り替えます。
Fix rotate
なし
Move
[Move to Position]ウィンドウ
を開きます。このウィンドウで
は、ノズルを特定の座標に移動
できます。 詳細については、「
ノズルを特定の場所に移動する
方法」(38ページ)を参照して
ください。
Stop
(停止)
ロボットを停止します。
Home
(ホーム)
ロボットをホーム位置(0,0,0)
に送ります。
時計/スト
ップウォ
ッチ
(ボックスをクリックして表示を
切り替えます) DispenseMotion
コントローラーのオペレーティ
ングシステムで選択されたタイ
ムゾーンの時刻を表示するか、
プログラムの実行時間を計るス
トップウォッチとして機能しま
す。
ストップウォッチに切り替える
と、時刻は0:0:0にリセットされ
ます。 [Run]を選択すると、ス
トップウォッチはカウントを開
始し、プログラムが終了すると
カウントを停止します。
ナビゲーション&ジョグウィンドウのビュー1
GVシリーズ 自動ディスペンシングシステム
38
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
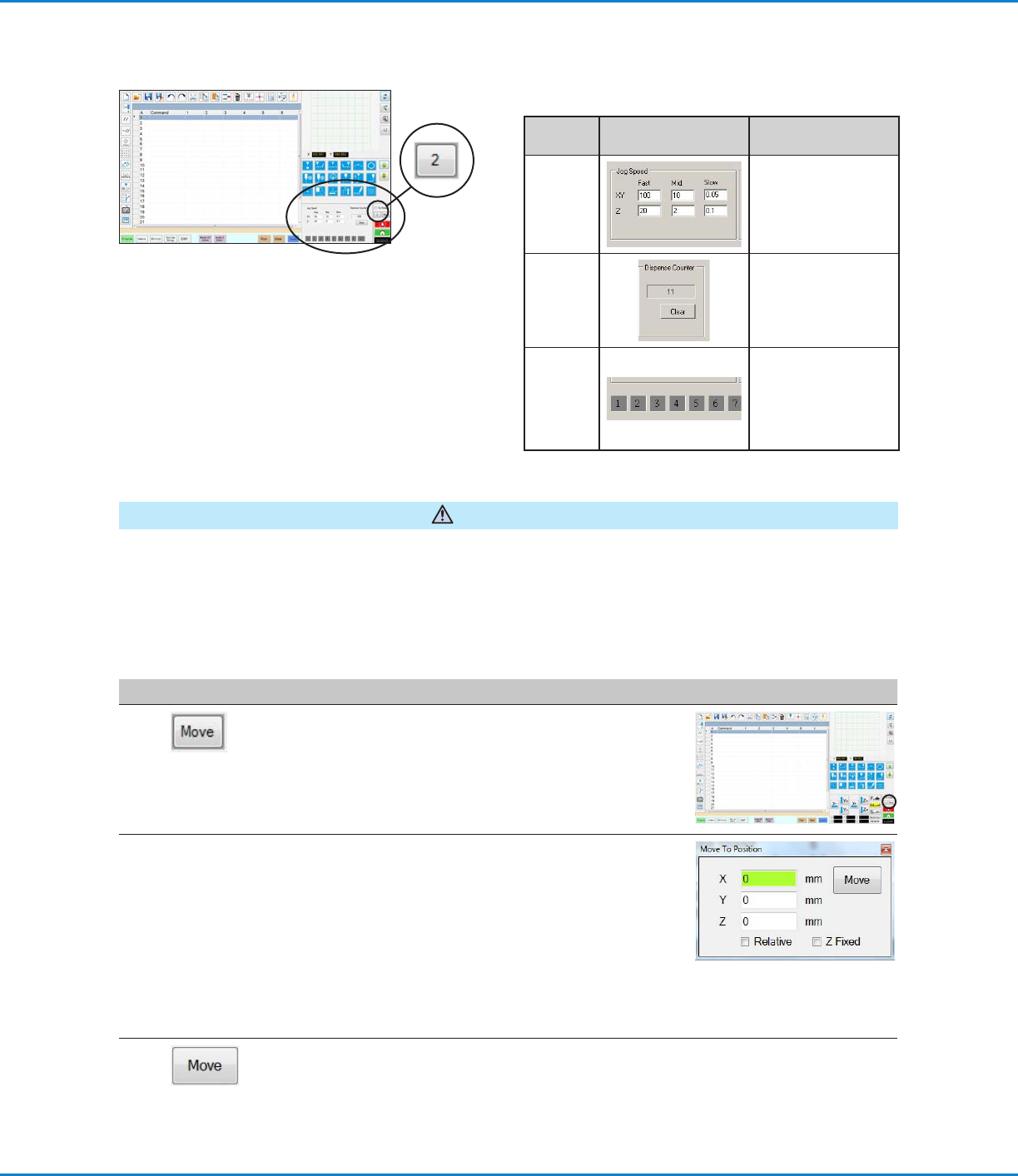
ビュー2
フィー
ルド
画面領域 機能
Jog
Speed
キーボードで値を入力
することで、ジョグ速
度の設定を変更でき
ます。
Dispense
Counter
吐出動作の回数を表示
します。カウンターを
ゼロ(0)にリセット
するには、[CLEAR]を
クリックします。
Output
Trigger
出力番号をクリックす
ることで、接続されて
いる出力をトリガーで
きます。赤は出力が
[ON]であることを
示します。
ナビゲーション&ジョグウィンドウ (続き)
ナビゲーション&ジョグウィンドウのビュー2
注意
機器の破損のリスク。 ノズルを特定の場所に移動するときは、特にZ軸の場合、軸の制限([System Setup] > [Axis Limits]
で指定)を超えないようにしてください。 これを行うと、ロボットが破損したり、ノズルが基板と衝突したりする可能性がありま
す。
ノズルを特定の場所に移動する方法
ジョグウィンドウの[Move]ボタンを使用すると、ノズルを特定の座標セットに移動できます。
# クリック 手順 参考画像
1
• ジョグウィンドウで、[MOVE]をクリックします。
[Move to Position]ウィンドウが開きます。
2 • 目標とする座標を入力します。 必要に応じて、次
のチェックボックスを選択または選択解除しま
す。
- Relative: 選択すると、ノズルは現在の位置を
基準にして、入力された座標に移動します。 選
択解除すると、ノズルはホーム位置(0, 0, 0)に
基づいて、入力された座 標に移 動します。
- Z Fixed: 選択すると、Z軸がロックアウトさ
れ、X座標とY座標のみを入力できるようにな
ります。
3 • [MOVE]をクリックします。
ノズルが、指定された位置に移動します。
• ウィンドウを閉じます。