JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第54页
GVシリーズ 自動ディスペンシングシステム 54 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 [Robot Initial Setup] ウ ィ ザー ド を使 用 し て シ ス テ ム を 設定す る [Robot Initial Setup…
GVシリーズ 自動ディスペンシングシステム
53
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
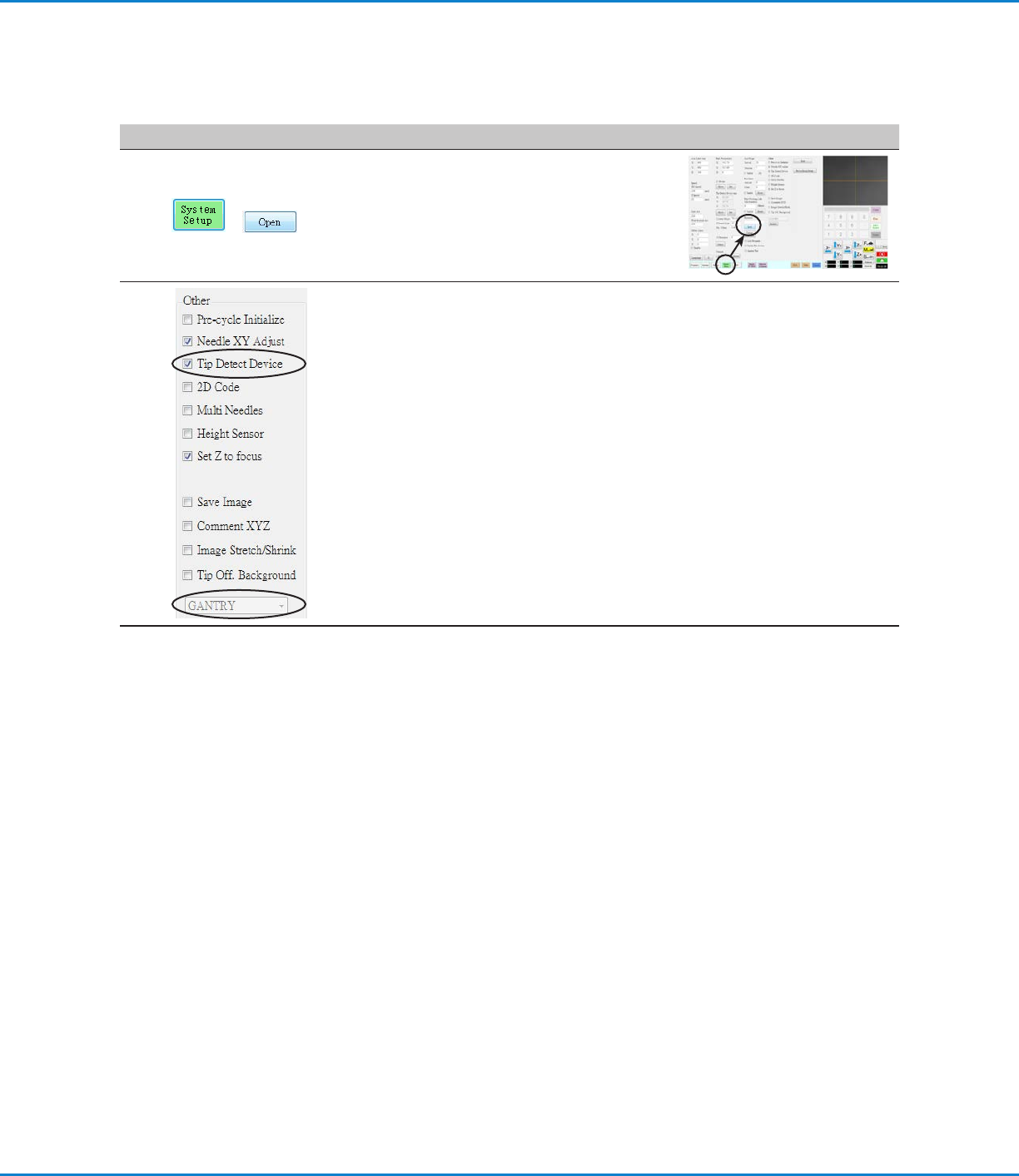
ロボットの機種とノズル検知器の選択を確認する
# クリック 手順 参考画像
1
>
• [System Setup] > [Open]の順にクリックし
ます。
2
• [Other]で以下を確認します。
- 正しいロボットの機種が表示されているか確
認します。ロボットの機種が正しくない場合は、
「ロボットの機種を変更する」(63ページ)を
参照して、正しい機種を選択してください。完
了したら、引き続き以下の手順を行います。
- お使いのシステムがノズル検知器を搭載して
いる場合は、[Tip Detect Device]にチェッ
クが入っているか 確 認します。
• 設定を変更した場合は、変更を有効にするた
め、DispenseMotion ソフトウェアをいったん
閉じて、再度開いてください。
3
• 「[Robot Initial Setup]ウィザードを使用して
システムを設定する」(54ページ)に進みます。
システムの設定とキャリブレーションを行う(必須)
GVシリーズ 自動ディスペンシングシステム
54
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
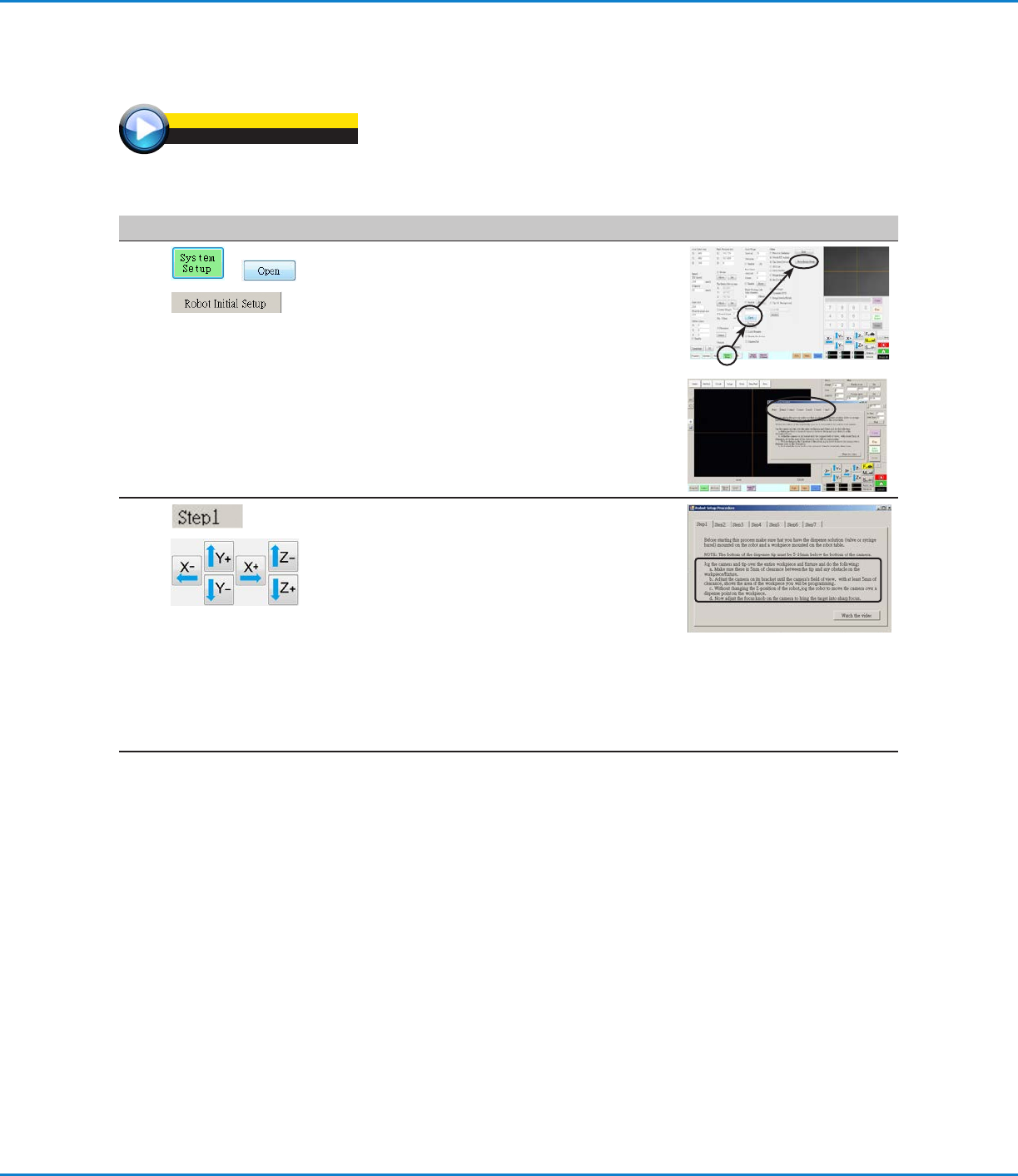
[Robot Initial Setup]ウィザードを使用してシステムを設定する
[Robot Initial Setup]ウィザードは、システムを正しく設定するために必要なすべての手順(オフセットの設定やキャリブレー
ションなど)を案内してくれます。このプロセスのビデオは、以下のリンクで見ることができます。
セットアップ動画をみる
www.nordsonefd.com/RobotInitialSetup
ロボットの初期設定([Step 1]タブ):[Robot Initial Setup]ウィザードを開いて、カメラの焦点を合わせる
# クリック 手順 参考画像
1
> >
• [System Setup] > [Open] > [Robot Initial
Setup]の順にクリックします。
[Robot Initial Setup]ウィザードが開きます。
• タブ1〜6の操作を1つずつ実行します。操作内
容は、必要に応じて参照できるように、本書にも
記載しています(下記の手順から)。
2
>
• [Step 1]タブをクリックします。
• ワーク全体の上でノズルをジョグ 送りし、ノズ
ルの下端とワークの最も高い部分との間に 5
mm 以上の間隔があることを確認します。
• 設定またはプログラミングを行うワークの領域
がカメラの視野に収まるまで、ブラケット上のカ
メラを調 整します。
• 試しドット塗布に適した位置までノズルをジョ
グ 送りします。
• 画面上の画像のピントを合わせます。カメラのピ
ントの合わせ方については、必要に応じて「カメ
ラ」(18ページ)を参照してください。
3
• 「ロボットの初期設定([Step 2]タブ):(ノズル
検知器を搭載した GV システムのみ)ノズル検
知器を設定する」(55ページ)に進みます。
GVシリーズ 自動ディスペンシングシステム
55
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
ロボットの初期設定([Step 2]タブ):(ノズル検知器を搭載したGVシステムのみ)ノズル検知器を設定する
重要:お使いのシステムがノズル検知器を搭載していない場合は、「ロボットの初期設定([Step 3]タブ):カメラ-ノズル間
のオフセットを設定する」(56ページ)に進んでください。
# クリック 手順 参考画像
1
• [Step 2]タブをクリックします。
2
>
• ノズル検知器のセンサーから約 2 mm 上の位
置までノズルをジョグ送りします。
• [Set Tip Detect Position]をクリックします。
3
• [Detect]をクリックします。
ノズルがセンサーに触れ、ノズルの位 置が 検 知
され、ノズルのオフセット値が[Detect]ボタンの
横に表 示されます。
4
• [Detect]を再度クリックします。
ノズルのオフセット設 定が 確定します。
5
• 「ロボットの初期設定([Step 3]タブ):カメラ-
ノズル間のオフセットを設定する」(56ページ)
に進みます。
[Robot Initial Setup]ウィザードを使用してシステムを設定する (続き)