JP-Nordson-EFD-GV-Series-Operating-Manual.pdf - 第48页
GVシリーズ 自動ディスペンシングシステム 48 www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノ ー ド ソ ンEFD は、 世界中 で液剤塗布装置 の販売 ・ サー ビ ス を 行な っ て お り ま す 。 注意 エ キ ス パー ト ウ ィ ン ド ウ の設定 は、 本 マ ニ ュ ア ルの 該当 す る 手順 で説明 さ れ て い る、 高度な シ ス…
GVシリーズ 自動ディスペンシングシステム
47
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
システムパラメーターを設定する(続き)
[System Setup]画面のフィールド(続き)
項目 画面キャプチャ 説明
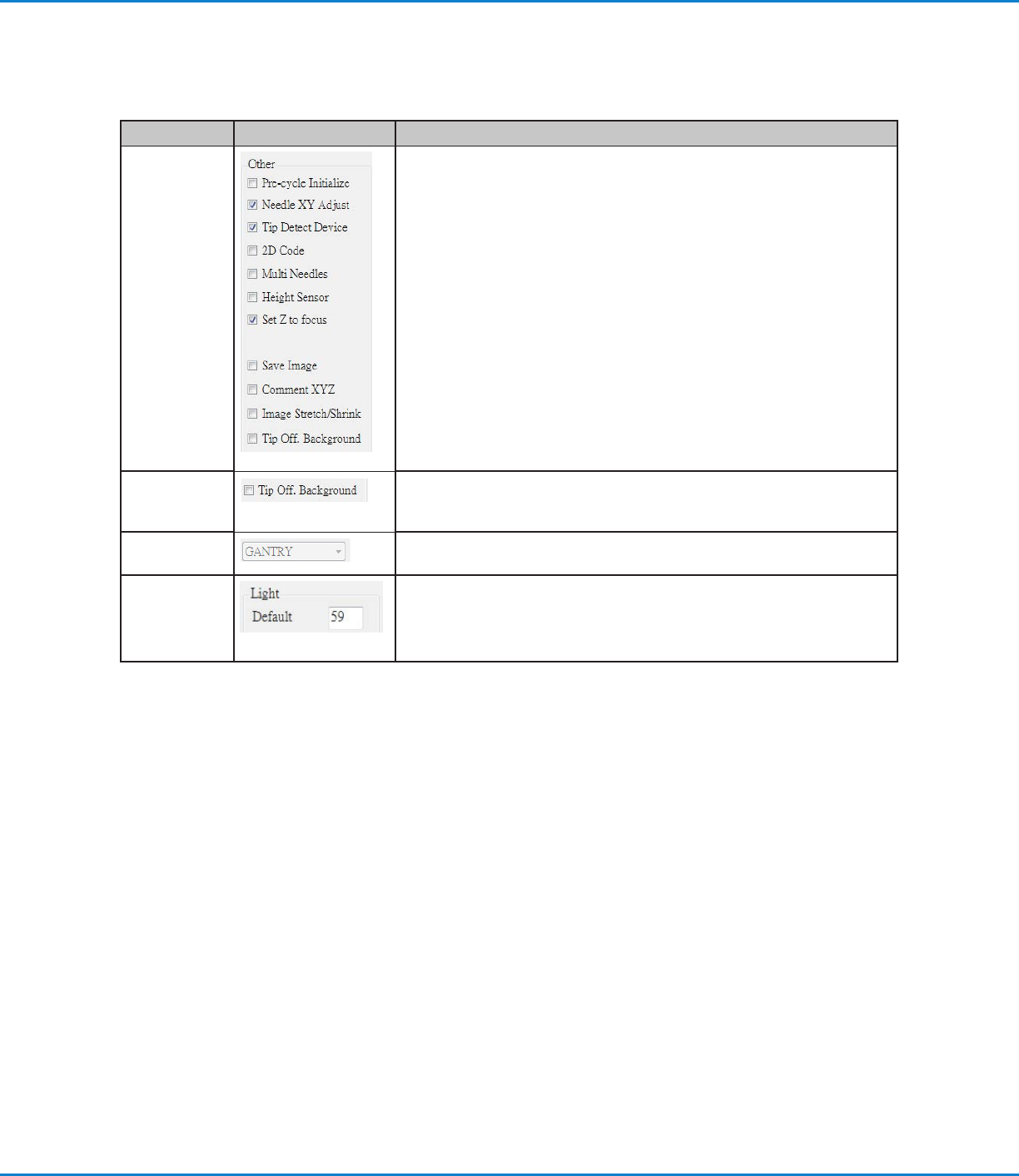
Other (続き)
• Save Image (OptiSure AOI のみ): チェックすると、システムは該当す
るOptiSure AOI機能の画像ファイルを自動的に保存します。
• Comment XYZ: チェックすると、コマンドが 無 効になっている場 合でも、
チップの高さ([Tip Detect Device]または[System Setup]画面の[Z
Clearance]設定)に加えられた変更はコマンドに影響します。
• Image Stretch/Shrink: このシステム設定は長時間の使用、またはプロ
セスステップ(ベーキングなど)の後にワークのサイズが拡大または縮 小し
た場合に役立ちます。 この設定にチェックを入れると、ワークが伸びたり縮
んだりした場合に、それに応じた基準マークの調整をすることができます。
注 記: 基準マークはカメラの視野内に収まる必要があります。つまり、システ
ムが対応できる伸縮には制限があります。
• Tip O. Background: チェックされていない場合、システムはニードル
Z検知またはニードルXY調整後にオフセットを自動的に更新します。チェッ
クした場合は、ニードルZ検知またはニードルXY調整後にオフセットを更新
するかどうかを選 択できます。詳 細については、「システムがオフセットを更
新するかどうかの設定」(67ページ)を参照してください。
[Model]ドロ
ップダウンメニ
ュー
塗布ソフトウェアの設定を行います。この設定は、システム設定(機種)と一致
している必要があります。どのような変更も、ソフトウェア再起動後に反映され
ます。
Expert
上級ユーザー専用です。「エキスパート設定を表示する」(48ページ)を参照く
ださい。
Light
(ある場合)
初 期 値: 照明の制御に外部スイッチが使用されている場合に、光量を制御で
きます。
注 記: [Light]設定は、オプションのライトアクセサリーが取り付けられている
場合のみ表示されます。
GVシリーズ 自動ディスペンシングシステム
48
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
注意
エキスパートウィンドウの設定は、本マニュアルの該当する手順で説明されている、高度なシステム設定用です。ここに記載
されている情報は、参考用です。本マニュアルで指定されている以外のエキスパート設定を変更する場合は、ノードソンEFD
の担当者までお問い合わせください。
システムパラメーターを設定する(続き)
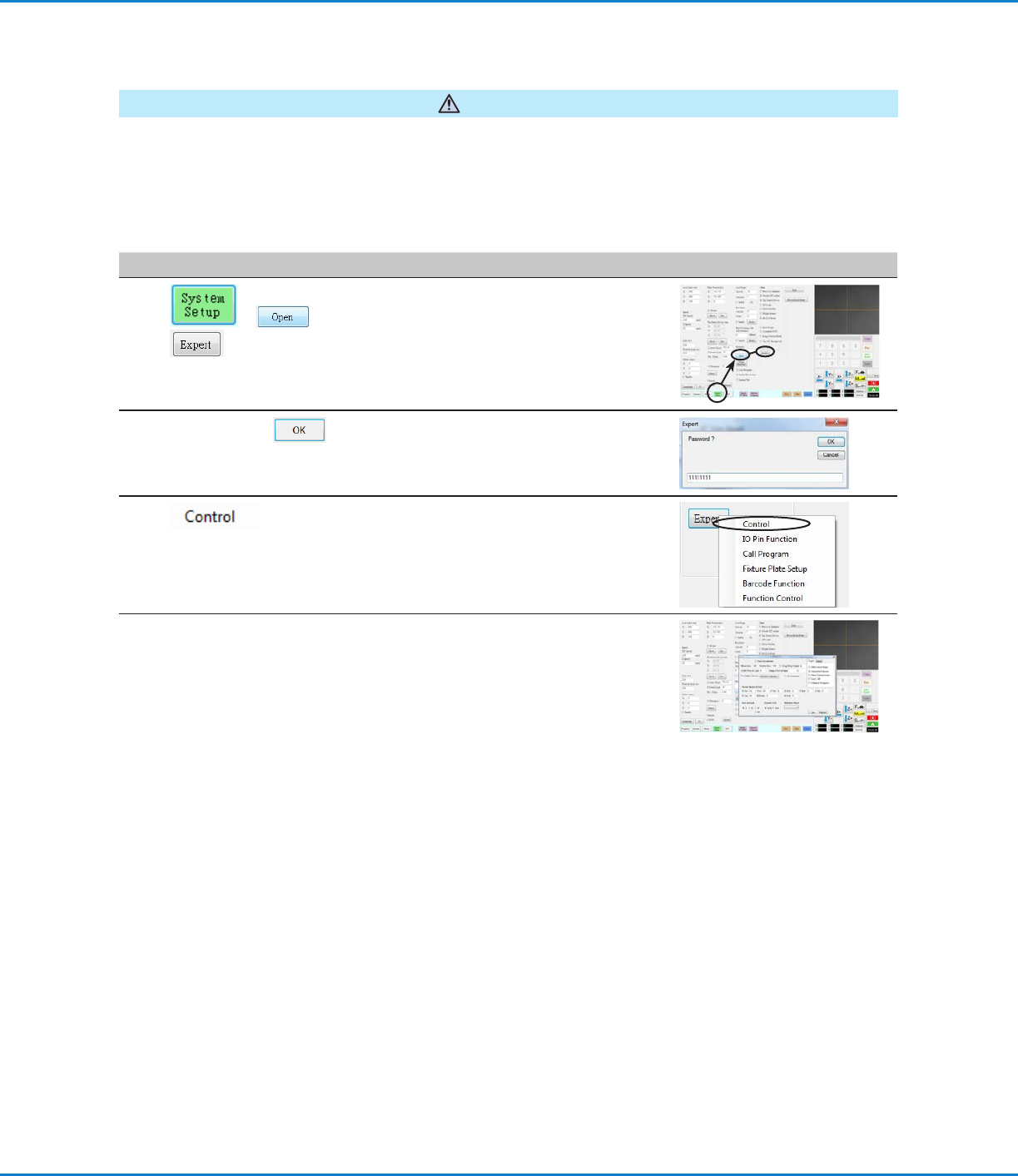
エキスパート設定を見る方法
# クリック 手順 参考画像
1
> >
• [SYSTEM SETUP] > [OPEN] > [EXPERT]
の 順 にクリックします。
2
11111111 >
• 「11111111」と入力し、[OK]をクリックしま
す。
3 • [CONTROL]をクリックします。
4 エキスパートウィンドウが開きます。
• エキスパートウィンドウの設 定については、「エ
キスパートウィンドウのフィールド」( 4 9ページ )
を参 照してください 。
GVシリーズ 自動ディスペンシングシステム
49
www.nordsonefd.com/jp japan@nordsonefd.com +81-3-5762-2760 ノードソンEFDは、世界中で液剤塗布装置の販売・サービスを行なっております。
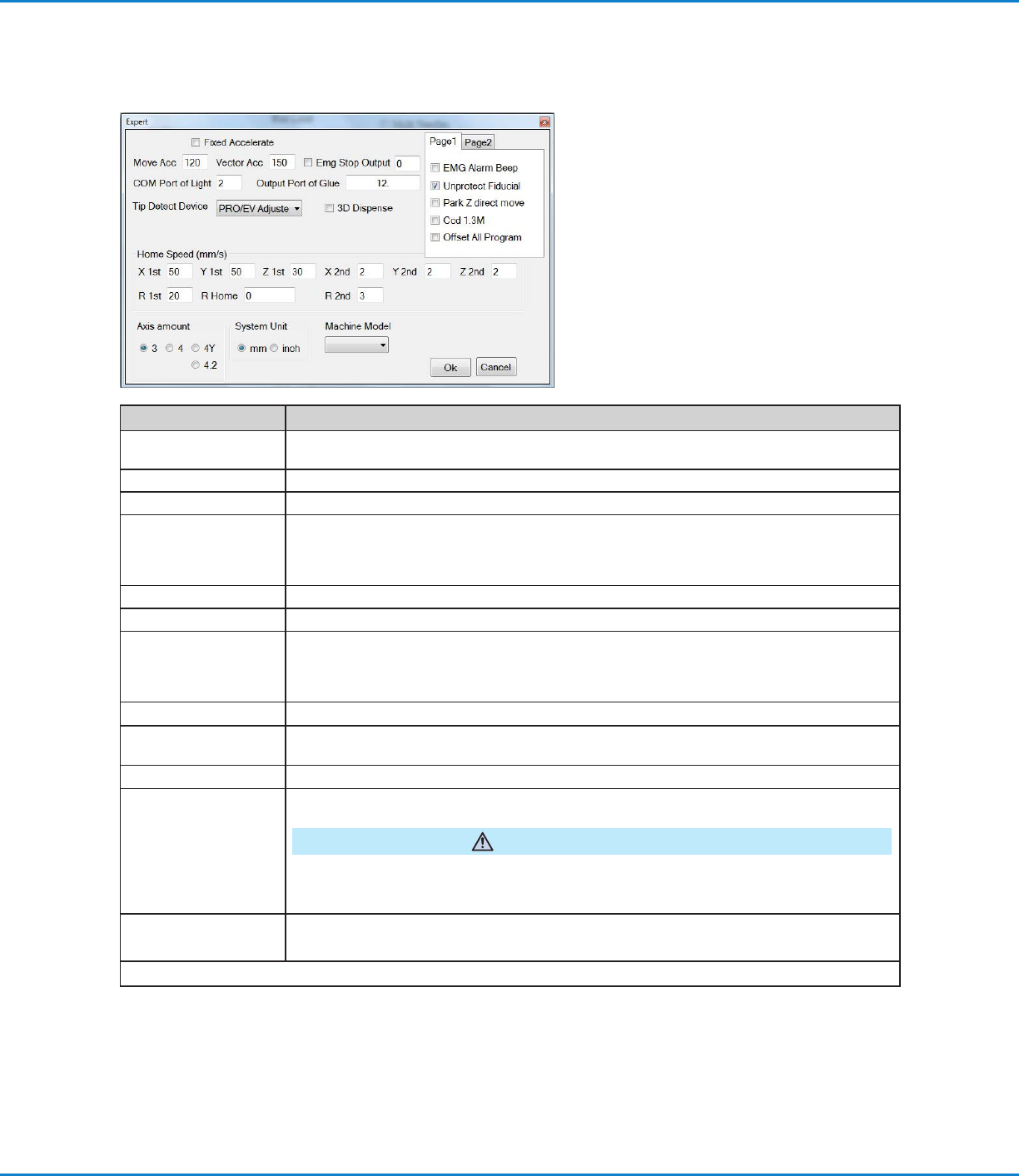
項目 説明
Fixed Accelerate チェックを外すと、加減速でロボットが揺れます。チェックを入れると、ロボットがよりスムーズに
動くようになります。
Move Acc ポイント間Accの最小値を設定します。
Vector Acc ラインAccの最小値を設定します。
Emg Stop Output ディスペンスプログラムが実行中で、[EMERGENCY STOP] ( 緊急停止 ) ボタンが押されたとき
に、指定された出力を[ON]にします。これはバイナリフィールドです: 4 を入力すると、出力 3
がオンになります。8 を入力すると、出力 4 がオンになります。これは、出力 1、2、3、および 4
の結合値が 1、2、4、および 8 であるためです。
COM Port of Light ライトコントローラーポートのため、常に2に設定します。
Output Port of Glue システムが塗布のトリガーに必要となる出力を指定します。
Tip Detect Device
ロボットに取り付けられているノズル検知装置のタイプを指定します:
• PRO/EVアジャスター - PROPlus、PRO、EV、GVシリーズシステムで使用されるノズル検知装置
• Rアライナー - Rシリーズシステムに使用されるノズルアライナー
3D Dispense
未使用
Home Speed (mm/s)
最初の行の値は、ロボットがホームポジションに移動する速度を設定します。2行目の値は、ロボッ
トがホームセンサーから離れるときの移動速度を設定します。
Axis amount
ロボット軸数の設定
System Unit
測定単位をミリメートルまたはインチに設定します。
注意
すべてのロボットは工場出荷時、推奨システム単位としてミリメートル(mm)に設定されていま
す。インチに変更することは推奨されず、既存のプログラムはすべて使用できなくなります。さら
に、いくつかのコマンドはインチシステム単位と互換性がありません。
Machine Model
ロボットモデルを指定します。
注記:詳細は「ロボットモデルの選択を変更する」(63ページ)を参照してください。
次のページに続く
システムパラメーターを設定する(続き)
エキスパートウィンドウのフィールド