NXT系列编程手册NEXIM编.pdf - 第217页
PRG-NXTSN-006S0 3. 元件数据 NXT 系列 编程手册 Nexim 编 203 Low tackiness assist mode 设定元件贴装时的模式。 Mode 设定贴装元件时的元件分类。 动作设定步骤-选项-详细设定 Feeder Indexing Priority(from W12f) 设定 W12F 以上的 F 类型供料器的送料速度。 (Stab ility: 标准送料速度,Spe ed: 高速送料速度) MT…
3. 元件数据 PRG-NXTSN-006S0
202 NXT 系列 编程手册 Nexim 编
Soft place mode
对指定 Z 轴贴装元件用的下降速度和元件贴装后上升速度的模式进行设定。
Soft place down speed
对 Z 轴贴装元件用的下降速度,以相对 Z 轴的最高速度的比例 (%) 进行设定。[Soft place mode] 设定为
“Use speed for down only” 或者 “Use separate speeds for up and down” 时,以此设定值动作。
此速度太快时,元件可能被反弹并导致贴装偏移。
Soft place down Height
设定 Z 轴以 “Soft place down speed” 的设定速度开始下降时的高度。[Soft place mode] 设定为
“Use speed for down only” 或者 “Use separate speeds for up and down” 时,以此设定值动作。
Soft place up speed
对 Z 轴贴装元件后的上升速度,以相对 Z 轴的最高速度的比例 (%) 进行设定。[Soft place mode] 设定为
“Use speed for up only” 或者 “Use separate speeds for up and down” 时,以此设定值动作。此
速度太快时,元件可能被反弹并导致贴装偏移。
Soft place up Height
设定 Z 轴以 “Soft place up speed” 的设定速度结束上升时的高度。[Soft place mode] 设定为 “Use
speed for up only” 或者 “Use separate speeds for up and down” 时,以此设定值动作。
Low tackiness assist Control
设定是否使用低粘着力对应模式进行贴装。
备注
低粘着力是指元件和电路板之间的接合力较低的状态。
设定值 说明
Use Soft Place Speed for up and down 对 Z 轴的下降速度和上升速度进行一次性设定时选择。
Use speed for down only 仅对 Z 轴的下降速度进行设定时选择。
Use speed for up only 仅对 Z 轴的上升速度进行设定时选择。
Use separate speeds for up and down 分别对 Z 轴的下降速度和上升速度进行设定时选择。
设定值 说明
No 通常动作时的设定
Auto 使用推荐设定,并以低粘着力对应模式进行贴装。
PRG-NXTSN-006S0 3. 元件数据
NXT 系列 编程手册 Nexim 编
203
Low tackiness assist mode
设定元件贴装时的模式。
Mode
设定贴装元件时的元件分类。
动作设定步骤-选项-详细设定
Feeder
Indexing Priority(from W12f)
设定 W12F 以上的 F 类型供料器的送料速度。
(Stability: 标准送料速度,Speed: 高速送料速度)
MTU
Shuttle Speed
设定将料盘单元上的料盘装载到机器上时的往复臂速度。料盘单元 -L 的最大速度是 4。料盘单元 -LT、
LTC 的最大速度是 5。料盘单元 -LT2 的最大速度是 6。最小速度是 1。
Magazine Speed
设定料盘单元内的料盘箱上下移动时的加减速度。
(Standart: 标准速度,Mid: 中速,Low: 低速)
Tray Pick Offset Z
设定料盘凹槽中的元件吸取位置的上下方向的修正量。
正数为向上,负数为向下。
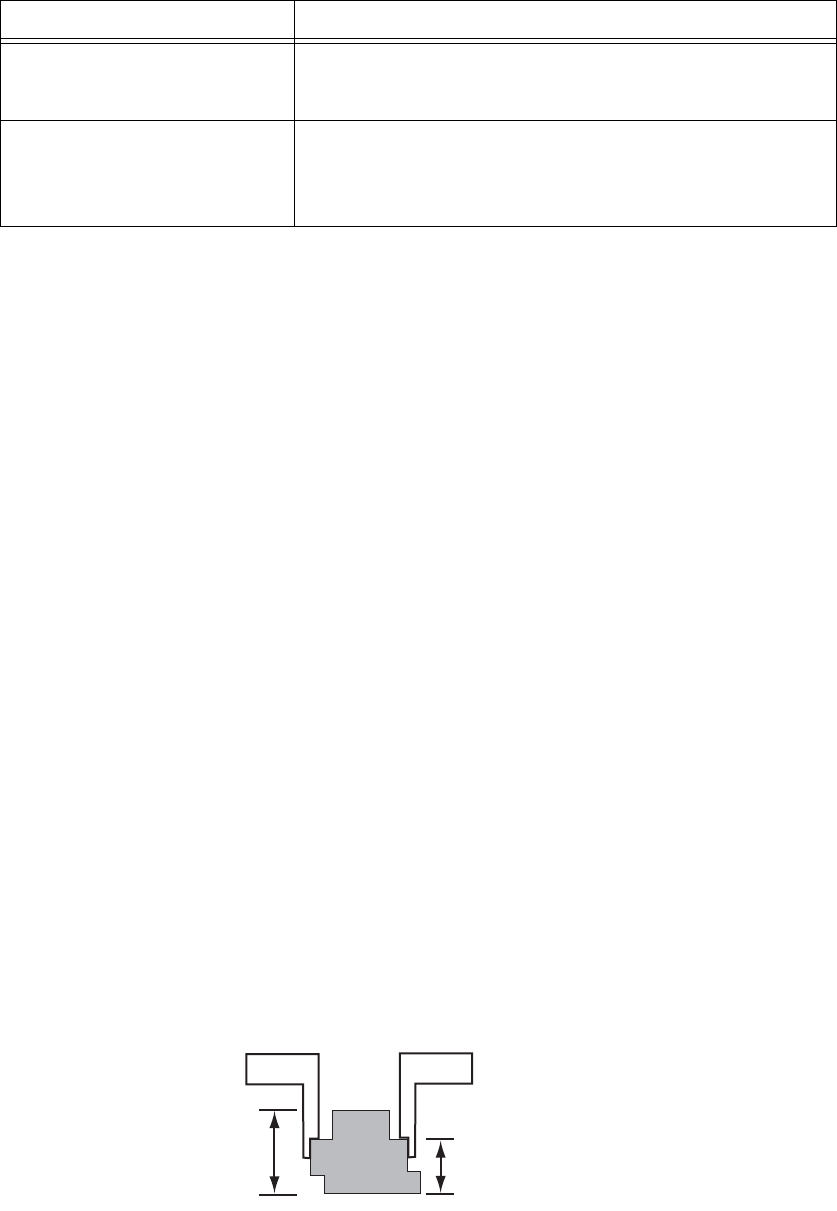
Pick
Actual Pickup Body Height
设定夹紧位置处的元件高度。
设定值 说明
Low tackiness assist mode 1 以低粘着力对应模式 1 进行贴装。
使用低粘着力对应模式时,推荐此设定值。
Low tackiness assist mode 2 以低粘着力对应模式 2 进行贴装。
因为比低粘着力对应模式 1 使用更长的贴装时间进行动作,
可以对应更加低粘着力的元件。
ܗӊ催ᑺ
01PRG0064S
ᴎẄ⟾
ᅲ䰙ⱘপ催ᑺ
ᴎẄ⟾
ܗӊЏԧ
3. 元件数据 PRG-NXTSN-006S0
204 NXT 系列 编程手册 Nexim 编
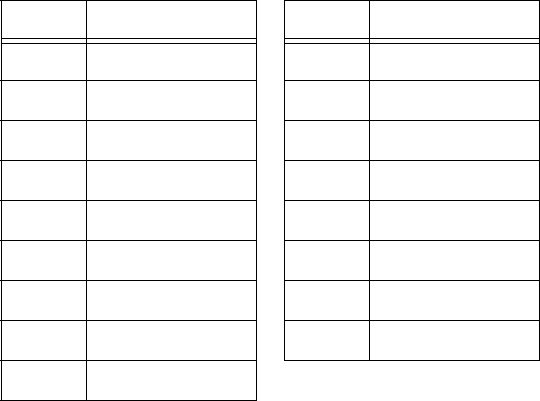
Motor Gripping Force
指定吸取中机械爪的夹力。该设定只对 OF 工作头有效。
Pin
Location Pin Length
元件主体上存在定位销时,设定定位销的长度 (mm)。使用压下贴装功能时需要该设定。
Place
Do Place Precision Priority
设定是否执行高精度贴装。选择 [Yes] 时,则该外形数据的元件就被分配到带高精度贴装工作头 (H01,
H02,F04 和 G04)的 M6-2SP 模组中。选择 [No] 时,在分配到模组时不考虑工作头的精度。
Push Delay Offset
使用机械夹类型的吸嘴进行贴装时,设定下降端的压下动作开始时间的修正量时间。
Unclamp Wait Offset
贴装插入引脚元件时,设定下降端的静止时间的修正量时间。
Rotate to Vertical Direction
选择有无元件的旋转。
Vision Area Offset Q
设定影像取入范围的旋转角度的修正量。
Part Correction Type
设定影像取入的补正类型。
动作设定步骤-选项-分配选项
Target Heads
限制元件贴装时使用的工作头时,设定可以使用的工作头。
Multi Camera
设定可以使用的相机类型。(可以选择多个。)
设定 力 设定 力
-6 3.7 newtons 3 8.2 newtons
-5 4.2 newtons 4 8.7 newtons
-4 4.7 newtons 5 9.2 newtons
-3 5.2 newtons 6 9.7 newtons
-2 5.7 newtons 7 10.2 newtons
-1 6.2 newtons 8 10.7 newtons
0 6.7 newtons 9 11.2 newtons
17.2 newtons 1011.7 newtons
27.7 newtons