NXT系列编程手册NEXIM编.pdf - 第218页
3. 元件数据 PRG-NXTSN-006S0 204 NXT 系列 编程手册 Nexim 编 Motor Gripping Force 指定吸取中机械爪的夹力。该设定只 对 OF 工作头有效。 Pin Location Pin Length 元件主体上存在定位销时,设定定位 销的长度 (mm) 。使用压下贴装功能时需要该 设定。 Place Do Place Precision Priority 设定是否执行高精度贴装。选择 [Yes…
PRG-NXTSN-006S0 3. 元件数据
NXT 系列 编程手册 Nexim 编
203
Low tackiness assist mode
设定元件贴装时的模式。
Mode
设定贴装元件时的元件分类。
动作设定步骤-选项-详细设定
Feeder
Indexing Priority(from W12f)
设定 W12F 以上的 F 类型供料器的送料速度。
(Stability: 标准送料速度,Speed: 高速送料速度)
MTU
Shuttle Speed
设定将料盘单元上的料盘装载到机器上时的往复臂速度。料盘单元 -L 的最大速度是 4。料盘单元 -LT、
LTC 的最大速度是 5。料盘单元 -LT2 的最大速度是 6。最小速度是 1。
Magazine Speed
设定料盘单元内的料盘箱上下移动时的加减速度。
(Standart: 标准速度,Mid: 中速,Low: 低速)
Tray Pick Offset Z
设定料盘凹槽中的元件吸取位置的上下方向的修正量。
正数为向上,负数为向下。
Pick
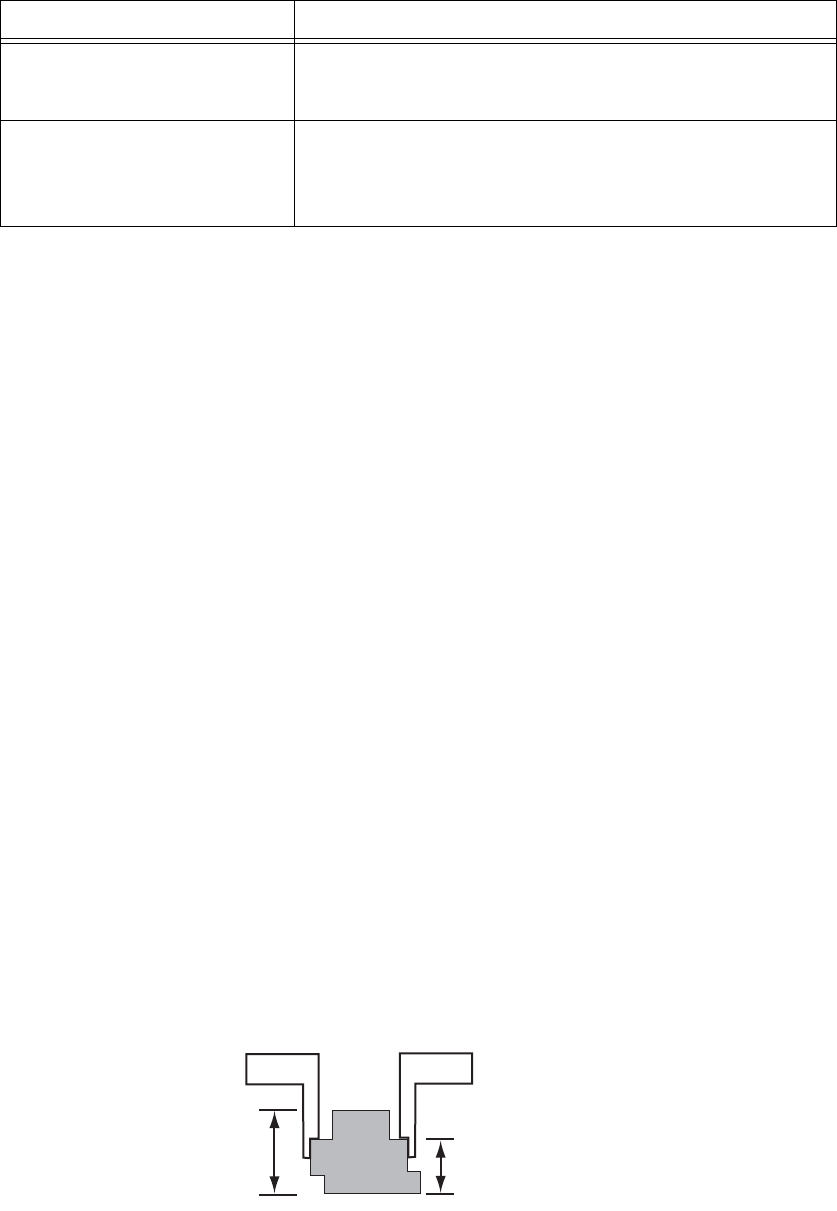
Actual Pickup Body Height
设定夹紧位置处的元件高度。
设定值 说明
Low tackiness assist mode 1 以低粘着力对应模式 1 进行贴装。
使用低粘着力对应模式时,推荐此设定值。
Low tackiness assist mode 2 以低粘着力对应模式 2 进行贴装。
因为比低粘着力对应模式 1 使用更长的贴装时间进行动作,
可以对应更加低粘着力的元件。
ܗӊ催ᑺ
01PRG0064S
ᴎẄ⟾
ᅲ䰙ⱘপ催ᑺ
ᴎẄ⟾
ܗӊЏԧ
3. 元件数据 PRG-NXTSN-006S0
204 NXT 系列 编程手册 Nexim 编
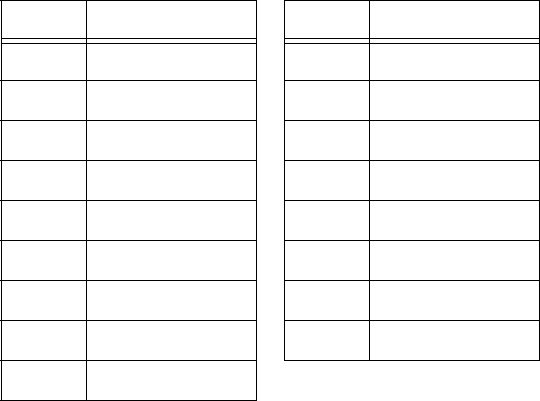
Motor Gripping Force
指定吸取中机械爪的夹力。该设定只对 OF 工作头有效。
Pin
Location Pin Length
元件主体上存在定位销时,设定定位销的长度 (mm)。使用压下贴装功能时需要该设定。
Place
Do Place Precision Priority
设定是否执行高精度贴装。选择 [Yes] 时,则该外形数据的元件就被分配到带高精度贴装工作头 (H01,
H02,F04 和 G04)的 M6-2SP 模组中。选择 [No] 时,在分配到模组时不考虑工作头的精度。
Push Delay Offset
使用机械夹类型的吸嘴进行贴装时,设定下降端的压下动作开始时间的修正量时间。
Unclamp Wait Offset
贴装插入引脚元件时,设定下降端的静止时间的修正量时间。
Rotate to Vertical Direction
选择有无元件的旋转。
Vision Area Offset Q
设定影像取入范围的旋转角度的修正量。
Part Correction Type
设定影像取入的补正类型。
动作设定步骤-选项-分配选项
Target Heads
限制元件贴装时使用的工作头时,设定可以使用的工作头。
Multi Camera
设定可以使用的相机类型。(可以选择多个。)
设定 力 设定 力
-6 3.7 newtons 3 8.2 newtons
-5 4.2 newtons 4 8.7 newtons
-4 4.7 newtons 5 9.2 newtons
-3 5.2 newtons 6 9.7 newtons
-2 5.7 newtons 7 10.2 newtons
-1 6.2 newtons 8 10.7 newtons
0 6.7 newtons 9 11.2 newtons
17.2 newtons 1011.7 newtons
27.7 newtons
PRG-NXTSN-006S0 3. 元件数据
NXT 系列 编程手册 Nexim 编
205
动作设定步骤-选项-吸取 · 贴装检查
Do Place Check
设定是否检查贴装后元件还在吸嘴上。该设定只用于支持该功能的工作头。
Do Part Height Check
指定是否执行元件高度检查。工作头可以检查元件高度时才使用该设定。
Do Feeder Pickup Check
设定是否确认每个吸嘴上有无元件。
动作设定步骤-选项-圧力控制选项
Load Check
指定是否生产中每隔一定间隔检查吸嘴负荷。
Pressure
使用搭载了压力传感器的工作头时,设定元件的贴装压力。输入范围是 220 gf ~ 1020 gf。如果指定为
“0”,则不使用压力控制功能进行元件的贴装。如果指定了小于最小值的设定,将使用最小压力进行贴
装。如果指定了大于最大值的设定,将使用最大压力进行贴装。该设定只用于在 NXT 系列中搭载了支持该
功能的工作头。该设定优先于 soft placement 设定。
Enable Pressure Sensor
使用带有压力传感器的工作头时,用于设定是否以 220gf 进行吸取。设定为 [Yes] 时,则使用压力控制功
能吸取元件,选择 [No] 时,则不使用压力控制吸取元件。该设定只用于在中搭载了支持该功能的工作头。
该设定优先于 soft pick-up 设定。
Place Motion Selection
使用压下贴装功能时,请在此项目中设定 1 ~ 4。如果输入 “0” (初始设定值)或者 “5” 时,则不进
行压下贴装。使用机械夹头进行元件吸取时,元件上方与机械夹头接触面之间的间隙变成 0mm。(通常情
况存在 0.5mm 的间隙)
备注
• 使用压下贴装功能时,请务必在电路板的下面配置支撑销。
• 当发生压下贴装错误且清除错误后,如果生产恢复,机器会认为该元件已经贴装过并且进入后续顺序的贴装 ( 不执行补件 )。
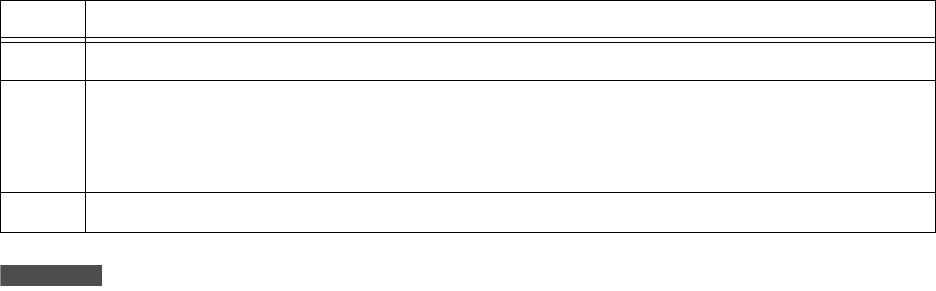
Placing Thrust Pressure
以 39.2N ~ 98N 来设定使用压下贴装功能时的贴装压力 ([Place Motion Selection] 项目被设定为 1 ~ 4
时 )。
设定值 说明
0 不使用压下贴装功能,进行通常的元件吸取和贴装。
1 ~ 4 输入此范围内的任意值后其动作都相同。使用压下贴装功能进行元件的贴装。按照通常,在吸
取元件后使用 [Placing Thrust] 中设定的力矩进行元件的压下贴装。如果力矩没有达到合适的
贴装高度范围,将会发生错误并且不能贴装元件。(这些设定下的旧机种的动作是不同的。为
了与旧机种兼容,此处对任何设定值都没有区别。)
5 不使用压下贴装功能,进行通常的元件吸取和贴装。