NXT系列编程手册NEXIM编.pdf - 第234页
3. 元件数据 PRG-NXTSN-006S0 220 NXT 系列 编程手册 Nexim 编 Type 16 基本上和 Type 6 相同。主要区别在于向内延伸的引 脚顶端的检测结果不用于元件的位置检测 。总之,卡尺 只测量引脚宽度方向,使用该检测结 果进行元件的位置检测。仅使用引脚 宽度检测结果用于元件的位置检 测。引脚顶端的检测结果仅作为内部 影像处理内部的参考数据使用。 只可用于两条或两条以上垂直 边有需检测引脚的元件上。此外,…
PRG-NXTSN-006S0 3. 元件数据
NXT 系列 编程手册 Nexim 编
219
Type 12
因引脚的顶端和根部与元件主体相连而显示不稳定等原因,卡尺不能稳定地进行检测时,使用该影像类型。
总之,卡尺只测量引脚宽度方向,使用该检测结果进行元件的位置检测。
这些 P Pattern 用于两条或两条以上垂直边上有引脚的元件,但不包括在 Y 方向使用机械爪吸取和使用
Vision Type 151 进行处理的情况。但是,如果可以稳定地检测出引脚的顶端和根部,则建议从 P Pattern
(Type 14,16)中选择符合条件的类型。另外,因为没有获取到使用引脚长度来对元件进行定位的信息,
所以无法在 1 条边或者 2 条平行边上有引脚的元件上使用这些类型。
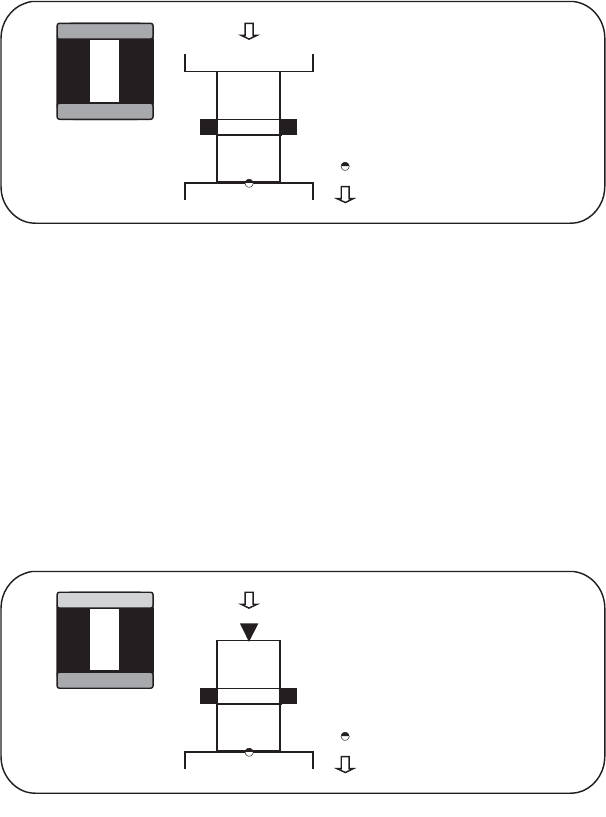
Type 14
基本上和 Type 4 相同。主要区别在于向外延伸的引脚顶端不用于判断元件的位置检测。总之,卡尺只测量
引脚宽度方向,使用该检测结果进行元件的位置检测。引脚顶端的检测结果仅作为内部影像处理内部的参
考数据使用。
只可用于两条或两条以上垂直边有需检测引脚的元件上。此外,因为没有获取到使用引脚长度来对元件进
行位置检测,所以无法在 1 条边或者 2 条平行边上有引脚的元件上使用这些类型。
对象元件举例 在元件背景为黑色的状态下使用前光处理 QFP 等情况。
35*6
㧦
ᅮНњ㽕㋴ৢⱘᮍ
㧦
㽕㋴തᷛ䕧ܹԡ㕂
7\SH
35*6
㧦
ᅮНњ㽕㋴ৢⱘᮍ
㧦
㽕㋴തᷛ䕧ܹԡ㕂
7\SH
3. 元件数据 PRG-NXTSN-006S0
220 NXT 系列 编程手册 Nexim 编
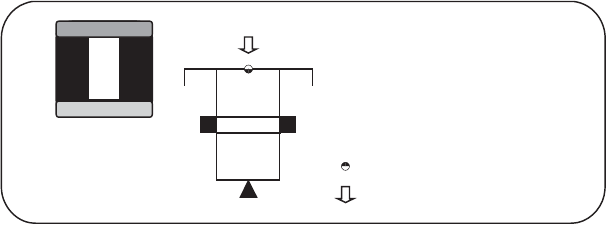
Type 16
基本上和 Type 6 相同。主要区别在于向内延伸的引脚顶端的检测结果不用于元件的位置检测。总之,卡尺
只测量引脚宽度方向,使用该检测结果进行元件的位置检测。仅使用引脚宽度检测结果用于元件的位置检
测。引脚顶端的检测结果仅作为内部影像处理内部的参考数据使用。
只可用于两条或两条以上垂直边有需检测引脚的元件上。此外,因为没有获取到使用引脚长度来对元件进
行定位的信息,所以无法在一条边或者两条平行边上有引脚的元件上使用这些类型。
对象元件举例 引脚向内侧延伸的黑色元件主体的元件,并且在垂直的边上存在引脚的元件 (LCC 等)。
35*6
㧦
ᅮНњ㽕㋴ৢⱘᮍ
㧦
㽕㋴തᷛ䕧ܹԡ㕂
7\SH
PRG-NXTSN-006S0 3. 元件数据
NXT 系列 编程手册 Nexim 编
221
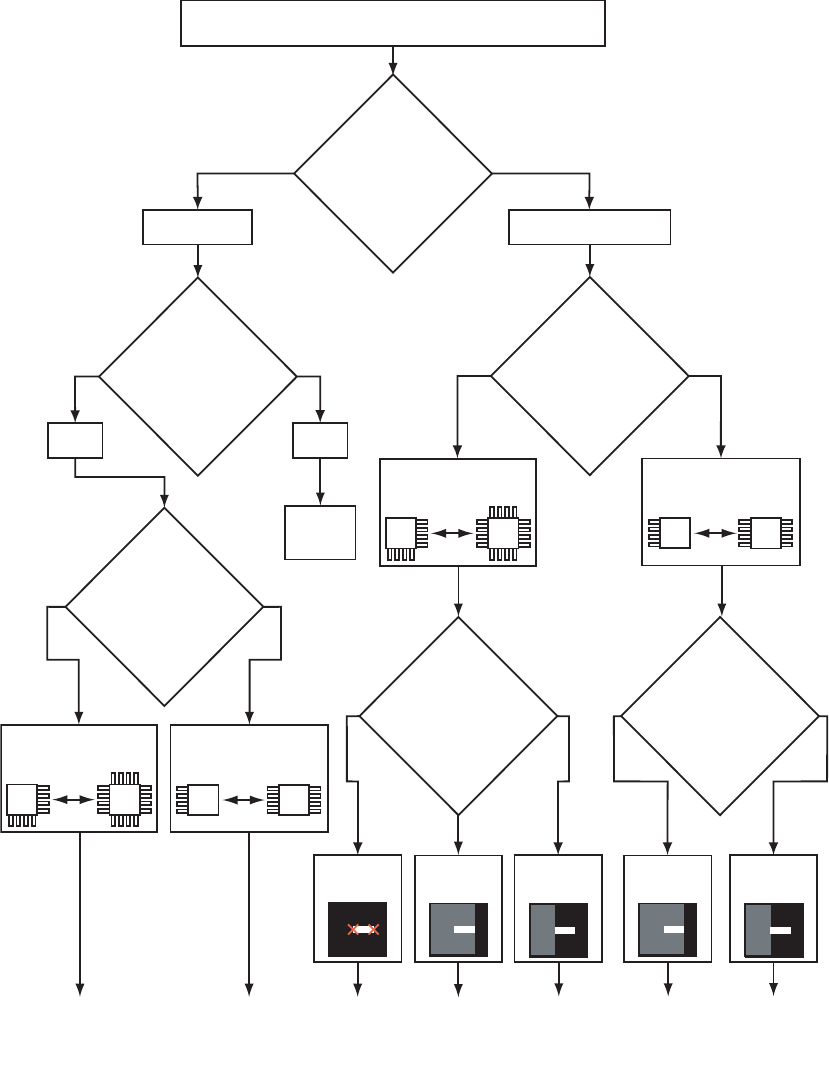
3.5.3 P Pattern 选择表
适合前光引脚元件的 Vision Type
%RG\
ջ〇ᅮ
%RG\
ݙջ〇ᅮ
%RG\
ջ〇ᅮ
%RG\
ݙջ〇ᅮ
䖍ᇍ䴶䖍
"
䖍ൖⳈˈ䖍"
ᕅڣ໘⧚᠔Փ⫼ⱘ
㽕㋴ⱘԡ㕂݇㋏"
ᕅڣ໘⧚ⱘ㚠᱃㡆"
ⱑ
ᓩ㛮䭓ᑺᮍⱘ
䖍㓬Ẕ⌟ⱘ⢊ᗕ"
ᓩ㛮䭓ᑺᮍⱘ
䖍㓬Ẕ⌟ⱘ⢊ᗕ"
䖍ᇍ䴶䖍
"
䖍ൖⳈˈ䖍"
䗖ড়ᓩ㛮ܗӊⱘ9LVLRQ7\SH
ᓩ㛮⛞ൿ
咥
ᕅڣ໘⧚᠔Փ⫼ⱘ
㽕㋴ⱘԡ㕂݇㋏"
ᓩ㛮ᔶ⢊"
-ᓩ㛮
$,0(;
Փ⫼
33DWWHUQ
33DWWHUQ
33DWWHUQ
33DWWHUQ
33DWWHUQ
33DWWHUQ
33DWWHUQ
35*6
ݙջ
䛑ϡ〇ᅮ
䗖ড়ᓩ㛮ᔶ⢊