XPF-1.0S编程手册.pdf - 第250页
PRG-XPF-1.0S 6. 编辑程序 XPF 编程手册 241 1. Body 设定元件的形状和有关颜色的项 目。 a. Body Length (X)(0.01 ~ 1 50.00 mm) 设定元件的 X 方向长度。( 不含引脚 ) 对应 Vision Type b. Body Width (Y)(0.01 ~ 15 0.00 mm) 设定元件的 Y 方向长度。( 不含引脚 ) 对应 Vision Type 注意 )Body Le…
6. 编辑程序 PRG-XPF-1.0S
240 XPF 编程手册
Part Type 的条目
Part Type 由以下 7 个条目构成。
·Body
·Lead/Element
·Process
·Vision
·Coplanarity
·Pin Check
各项目中有 Vision Type 不支持的内容。支持的 Vision Type 如下表表示。
切换到 [Lead/Element 数据编辑 ] 画面,将关于引脚或者要素
的数据在 1 个画面内进行编辑。
切换到 [ 贴装数据编辑 ] 画面,将关于贴装的数据在 1 个画面
内进行编辑。
显示出将 PartType 数据全部成为可以编辑的一览表形式的画
面。
切换到 [Vision/Coplanarity 数据编辑 ] 画面,将关于影像处
理或者浮脚测试的数据在 1 个画面内进行编辑。
切换到 [BGA 元件的编辑 ] 画面,将关于检查针的数据在 1 个画
面内进行编辑。
关闭 [ 元件编辑 ] 画面。
在 [Part Type 编辑 ] 画面上,在 [ 项目检索 ] 文本框中输入一部分项目名后,可以检索
一览表的项目。另外,按下[仴]按键后可以显示检索的分类的一览表。
进行检索时,按下 [ 向下检索 ] 按键。从当前选择的项目中向下方向进行检索。
PRG-XPF-1.0S 6. 编辑程序
XPF 编程手册 241
1. Body
设定元件的形状和有关颜色的项目。
a. Body Length (X)(0.01 ~ 150.00 mm)
设定元件的 X 方向长度。( 不含引脚 )
对应 Vision Type
b. Body Width (Y)(0.01 ~ 150.00 mm)
设定元件的 Y 方向长度。( 不含引脚 )
对应 Vision Type
注意 )Body Length(X)、Body Width(Y) 的设定,需要限制在长边 25.00mm,短边 20.00mm。
4.V 如果以 Vision Type 10 输入了产品样本数值或者公证尺寸 (0603 等 ) 到元件数据
中时,不管是否正常吸取,在 X(Y) 方向会发生尺寸错误。因为元件的角是圆的,元
件有可能看上去很小。这时,在机器上取入影像信息,请创建元件数据。
c. Body Length Tolerance(0.00 ~ 9.99 mm)
设定元件主体 X 方向的尺寸的公差值。
Vision Type 「10: Rect」(2125,3216 等没有引脚的元件 ),请输入这个数值。除此
以外的 Vision Type(SOP 和 QFP 等的附有引脚元件 ),不需要输入此数值。还有,被
查出的元件的尺寸在公差值以上的时候,出现公差值错误。数值请以元件主体尺寸的
10%左右输入。
设定值 「0.00」的时候不进行尺寸检查。
对应 Vision Type
d. Body Width Tolerance(0.00 ~ 9.99 mm)
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
ᇍᑨ9LVLRQ7\SH
٤٤٤٤٤٤
՟ᄤ
٤㧦䆒ᅮ᳝ؐᬜDŽ
㧦䆒ᅮؐ᮴ᬜDŽ㹿ᗑ㾚㧕
08PRG-0523S
6. 编辑程序 PRG-XPF-1.0S
242 XPF 编程手册
设定元件主体 Y 方向的尺寸的公差。
Vision Type 「10: Rect」(2125,3216 等没有引脚的元件 ),请输入这个项目。还
有,被查出的元件的尺寸在公差值以上的时候,出现公差值错误。数值请以元件主体
尺寸的 10%左右输入。设定值 「0.00」的时候不进行尺寸检查。
对应 Vision Type
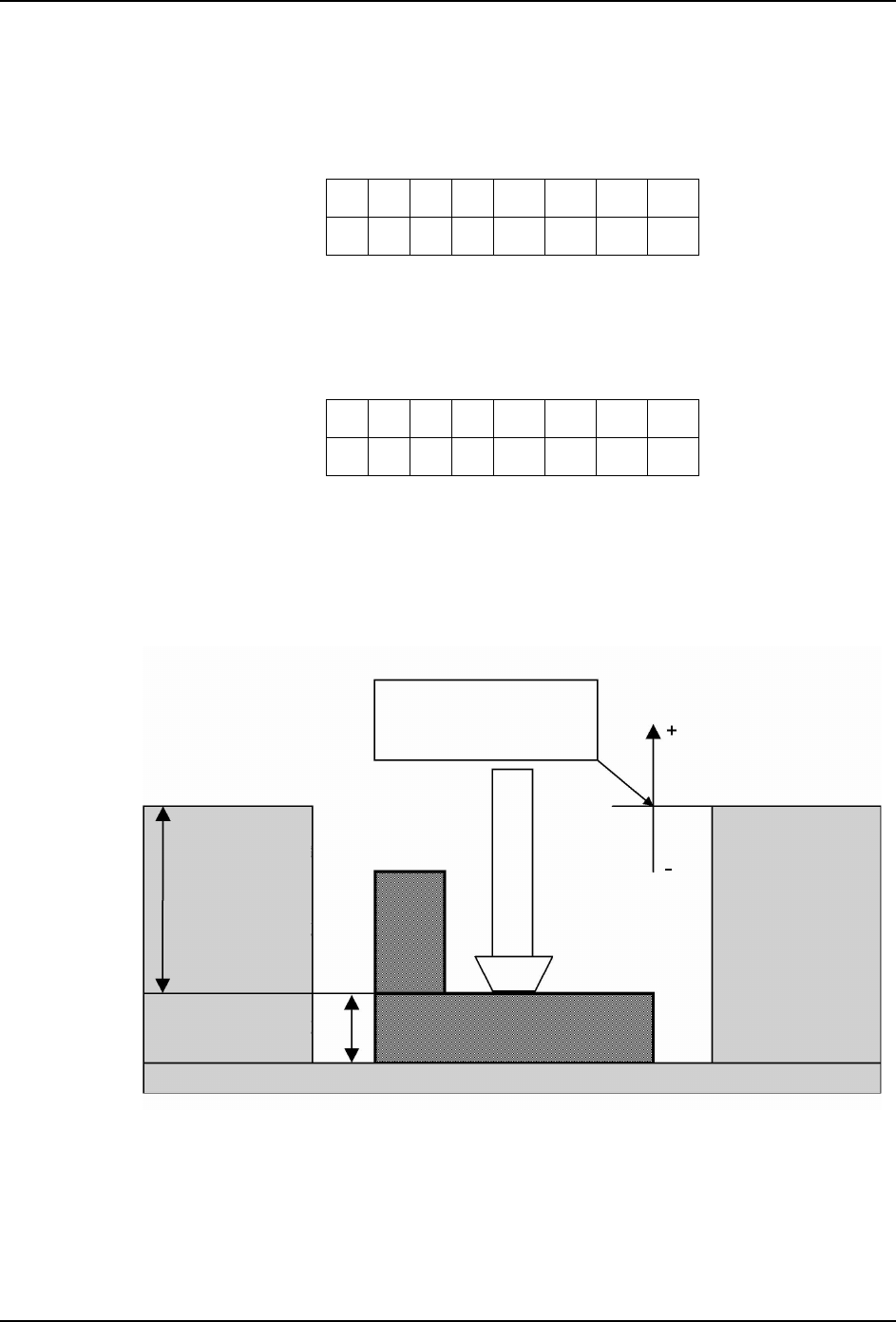
e. Part Height(0.01 ~ 25.40 mm)
设定元件的高度 ( 厚度 : 从吸嘴吸取面到元件底部 )。包含引脚长度。
关于 「Pickup Point Offset Z」和 「Placing Offset Z」在以后叙述。
对应 Vision Type
·料带/料盘的时候
料带及料盘的上面是吸取基准位置。
吸着时的 Z 轴高度
( 料带的时候 ) 吸取位置基准 + Pick-up Point Offset Z
( 料盘的时候 ) 吸取位置基准 + Tray Pick Offset Z
·机械夹具的时候
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
পԡ㕂ޚ
3LFNXS3RLQW2IIVHW=ॳ⚍
7UD\3LFN2IIVHW=ॳ⚍
3LFNXS3RLQW
2IIVHW=
կ఼᭭ᯊ
7UD\3LFN
2IIVHW=
᭭Ⲭᯊ
3DUW+HLJKW
0&6;6D