XPF-1.0S编程手册.pdf - 第263页
6. 编辑程序 PRG-XPF-1.0S 254 XPF 编程手册 例如,要向下修正 1mm 时请输入 “-1” 。 对应 Vision Type i. Pick- up Tolerance X,Pick -up Tolerance Y(0.00 ~ 9.99 mm) 设定 X、Y 方向各自元件的吸取偏差公差值。 请把元件中心和吸嘴中心的偏差看 作正常的范围进行设定。 设定值在 「0.00」的时候不进行检查。 对应 Vision Typ…
PRG-XPF-1.0S 6. 编辑程序
XPF 编程手册 253
e. Part Pick-up Check
设定识别了吸取错误时机器的动作。
对应 Vision Type
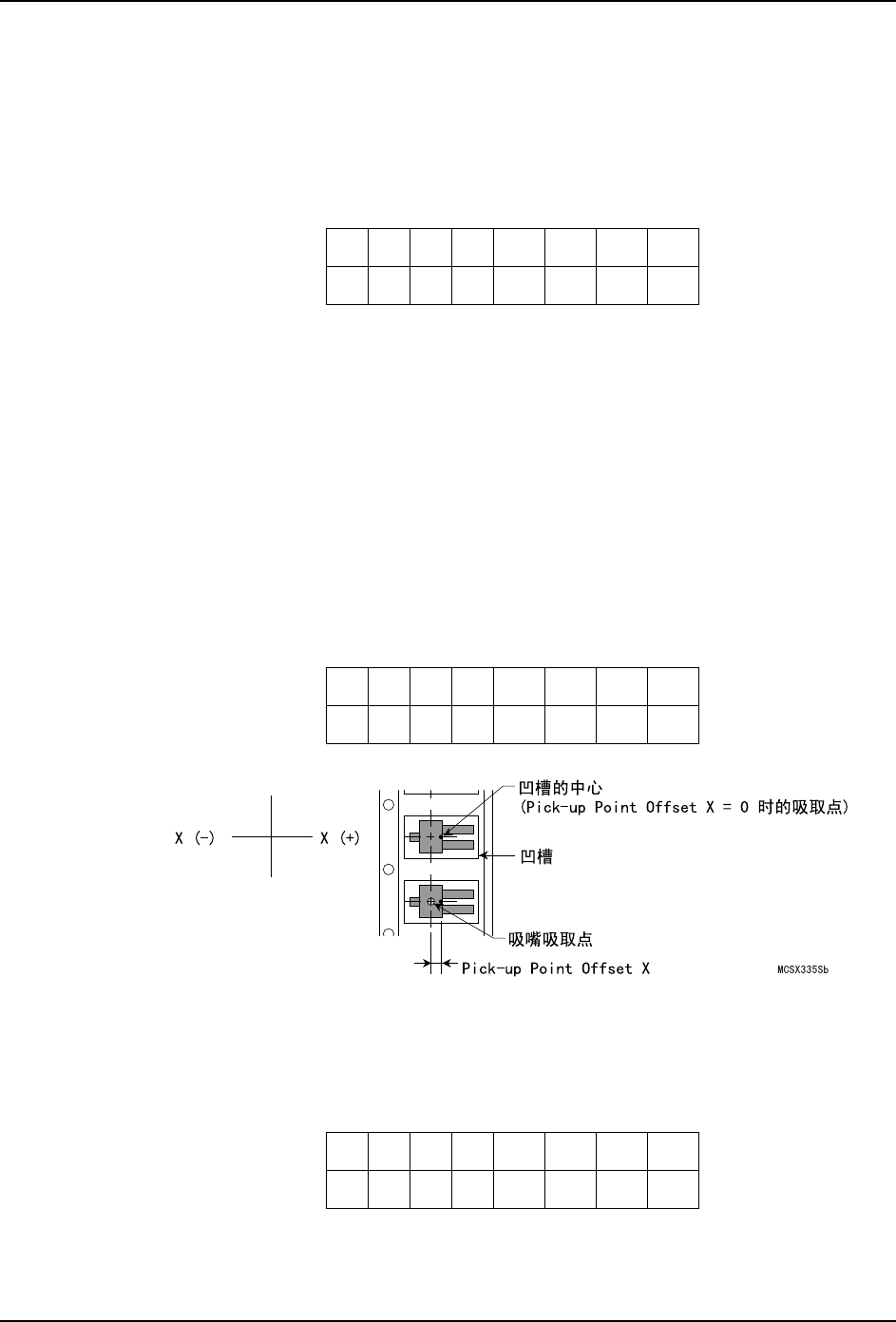
f. Pick-up Point Offset X(-12.70 ~ 12.70 mm)
供料器供应的元件,在不想从指定料站的 X 方向中央吸取元件时设定。
设定修正值的时候的元件的方向是以 「Direction 0」为基准。例如,要向右加 5mm
的修正值时输入 「5」。
对应 Vision Type
g. Pick-up Point Offset Y(-12.70 ~ 12.70 mm)
是从供料器供应的元件,在不想从指定料站的通常高度吸取元件时设定。
设定修正值时的元件方向 「Direction 0」为基准。例如,向里加 5mm 的修正值时输
入「5」。
对应 Vision Type
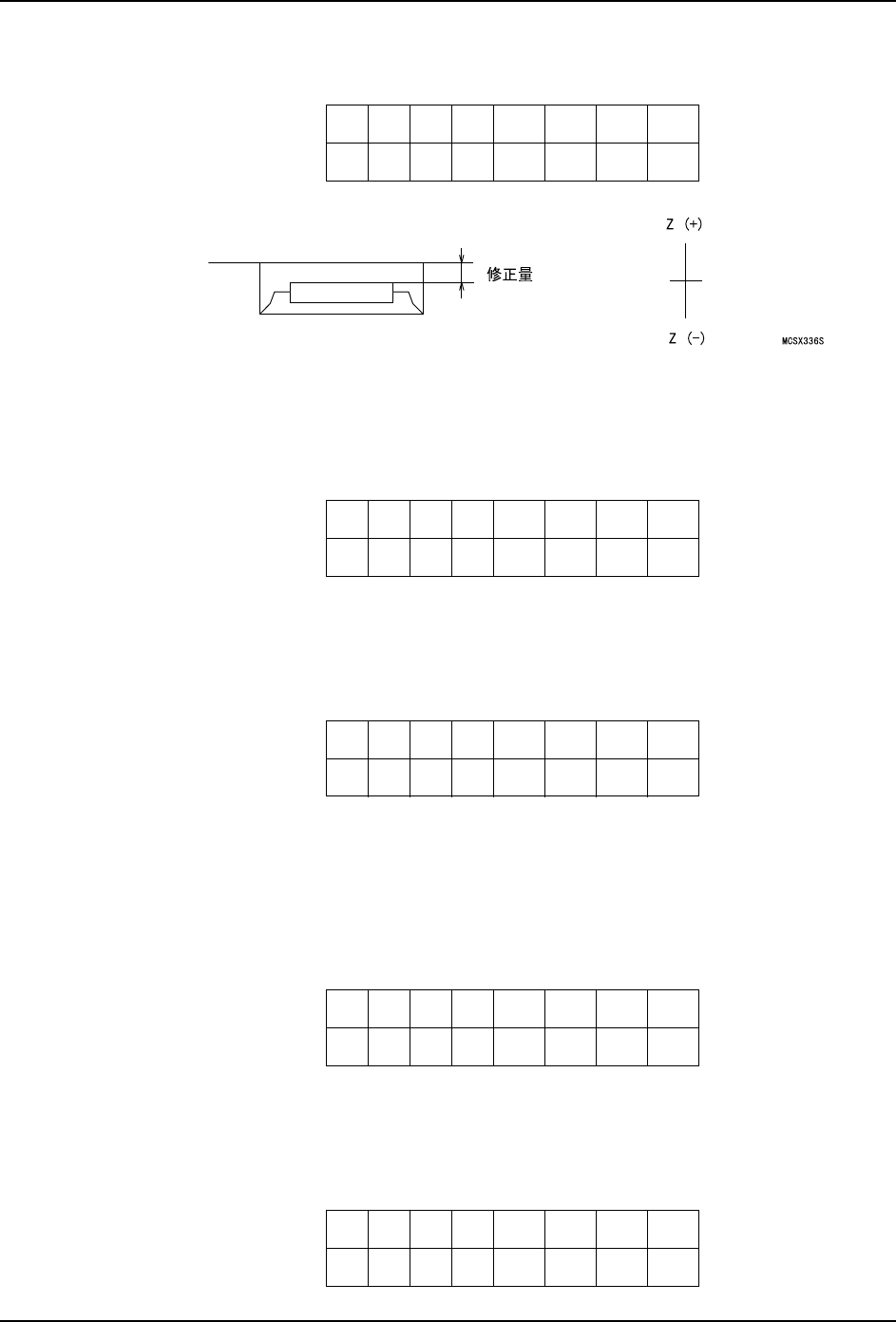
h. Pick-up Point Offset Z(-12.70 ~ 12.70 mm)
在供料器供应的元件时不想从指定料站的通常高度吸取元件时用此设定。
0: YES 使用自动修正值功能。
1: NO 不使用自动修正值功能。
10 18 19 20 100 124 180 230
○○○○○○○○
0: No 进行与选择 「Recover」的时候同样的动作。
1: Stop 如果没吸取就停止机器。
2: Recover 发生了在 「Recovery Times」指定的次数的错误时停止机器。
「Recovery Times」的数值为 「0」的时候,使用 [ 设定 / 管理 ]
- [ 工作条件设定 ] 画面的 [ 模式选择 ] 的 「补件次数」的数值。
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
6. 编辑程序 PRG-XPF-1.0S
254 XPF 编程手册
例如,要向下修正 1mm 时请输入 “-1”。
对应 Vision Type
i. Pick-up Tolerance X,Pick-up Tolerance Y(0.00 ~ 9.99 mm)
设定 X、Y 方向各自元件的吸取偏差公差值。
请把元件中心和吸嘴中心的偏差看作正常的范围进行设定。
设定值在 「0.00」的时候不进行检查。
对应 Vision Type
j. Pick-up Tolerance Q(0 ~ 45 度 )
设定元件吸取偏差公差值。
设定值 「0」的时候不进行检查。
对应 Vision Type
k. Soft Pick Speed(0.0 ~ 10.0)
为减轻进行吸取动作时对元件造成的冲击,而设定 Z 轴下降和上升的速度。(0.0 ~
10.0) 值越小速度越慢。输入 0 时,机器判断为 10.0。吸取时取这个输入值和 Slow
Place Speed 两者中较慢的数据为有效值。吸取元件期间,那 2 个数值和 「Part
Transport Speed」的数值中最慢的速度为有效值。
对应 Vision Type
l. Pick-up Orientation Q(0.0 ~ 359.99 度 )
在特殊吸嘴和机械夹具等中,有必须在吸取时预先使其旋转的元件时,输入旋转角
度。吸取的元件的基准方向是 「Direction 0」。
对应 Vision Type
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
PRG-XPF-1.0S 6. 编辑程序
XPF 编程手册 255
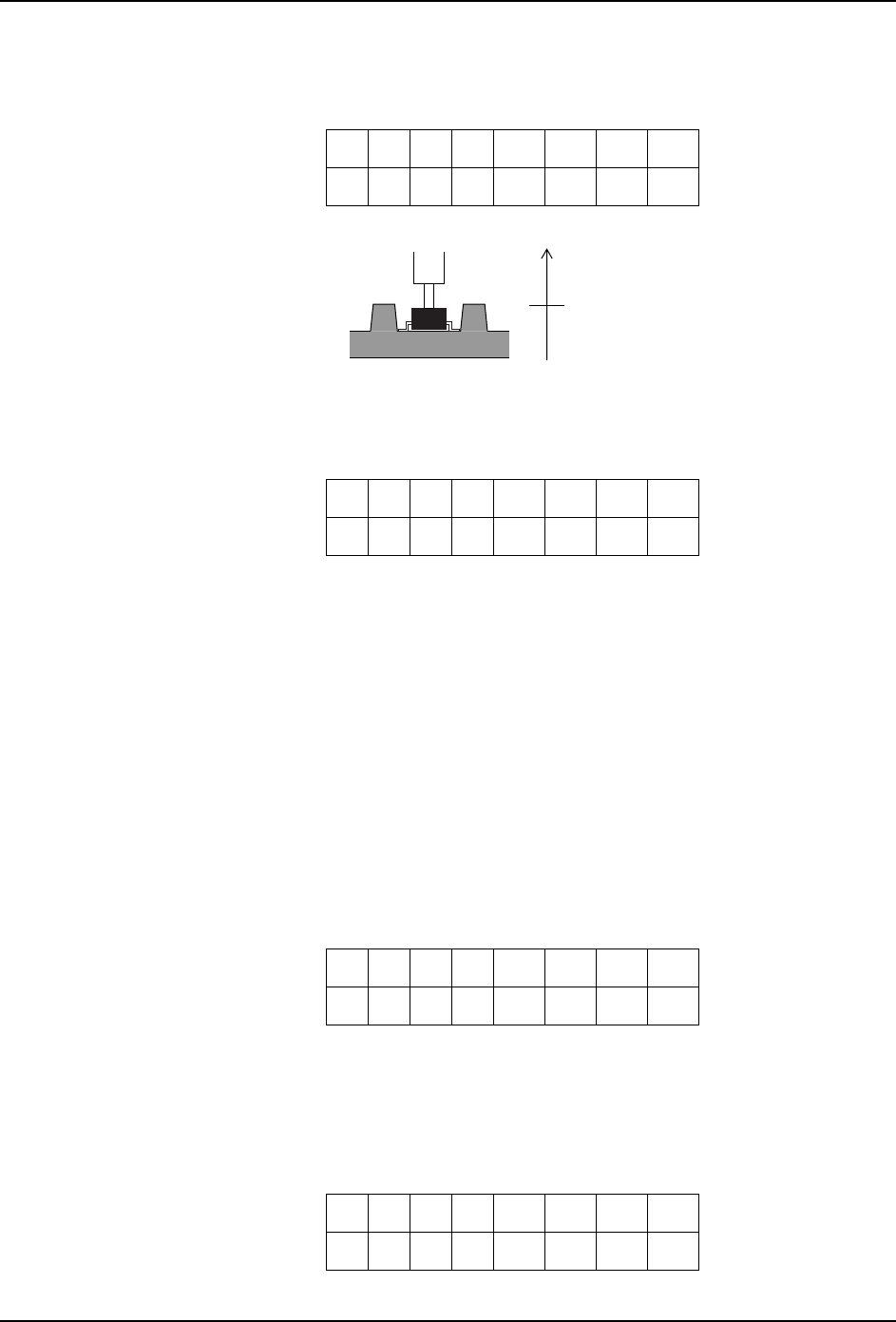
m. Tray Pick Offset Z(-25.4 ~ 12.7 mm)
在元件的吸取面与料盘表面的高度有差异时,设定吸取时候的 Z 方向的修正值。
对应 Vision Type
n. Tray Shuttle Speed
将在料盘单元及料盘往复臂内的料盘的移动速度从下述中选择。
对应 Vision Type
o. Placing Offset X(-100.00 ~ 100.00 mm)
对于较重元件,根据从吸取到贴装之间的传送速度有可能使吸嘴产生偏移。为防止因
传送速度过快引起偏移,请将此值尽量设定得比较小。
在此设定的速度适用于机器在持有元件期间的全部的伺服轴的速度。将输入 “0”时
作为 100%,在吸取元件期间,此值和 Soft Pick Speed、Slow Place Speed、Soft
Place Speed 中的最慢的速度为有效。
对应 Vision Type
p. Placing Offset X(-100.00 ~ 100.00 mm)
设定 X 方向的贴装修正值。设定这个数值后,在以顺序指定的坐标里 90 加上修正值
的位置上贴装。
元件的方向以 「Direction 0」并且贴装角度为 0 度的时候作为基准。
对应 Vision Type
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
Hi 4 快
Mid 3
Lo 2
ULo 1 慢
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
MCSX337
Z (+)
(-)