XPF-1.0S编程手册.pdf - 第264页
PRG-XPF-1.0S 6. 编辑程序 XPF 编程手册 255 m. Tray Pick Offset Z(-25.4 ~ 12.7 mm) 在元件的吸取面与料盘表面的高度 有差异时,设定吸取时候的 Z 方向的修正值。 对应 Vision Type n. Tray Shuttle Speed 将在料盘单元及料盘往复臂内的料 盘的移动速度从下述中选择。 对应 Vision Type o. Placi ng Offset X(-100.…
6. 编辑程序 PRG-XPF-1.0S
254 XPF 编程手册
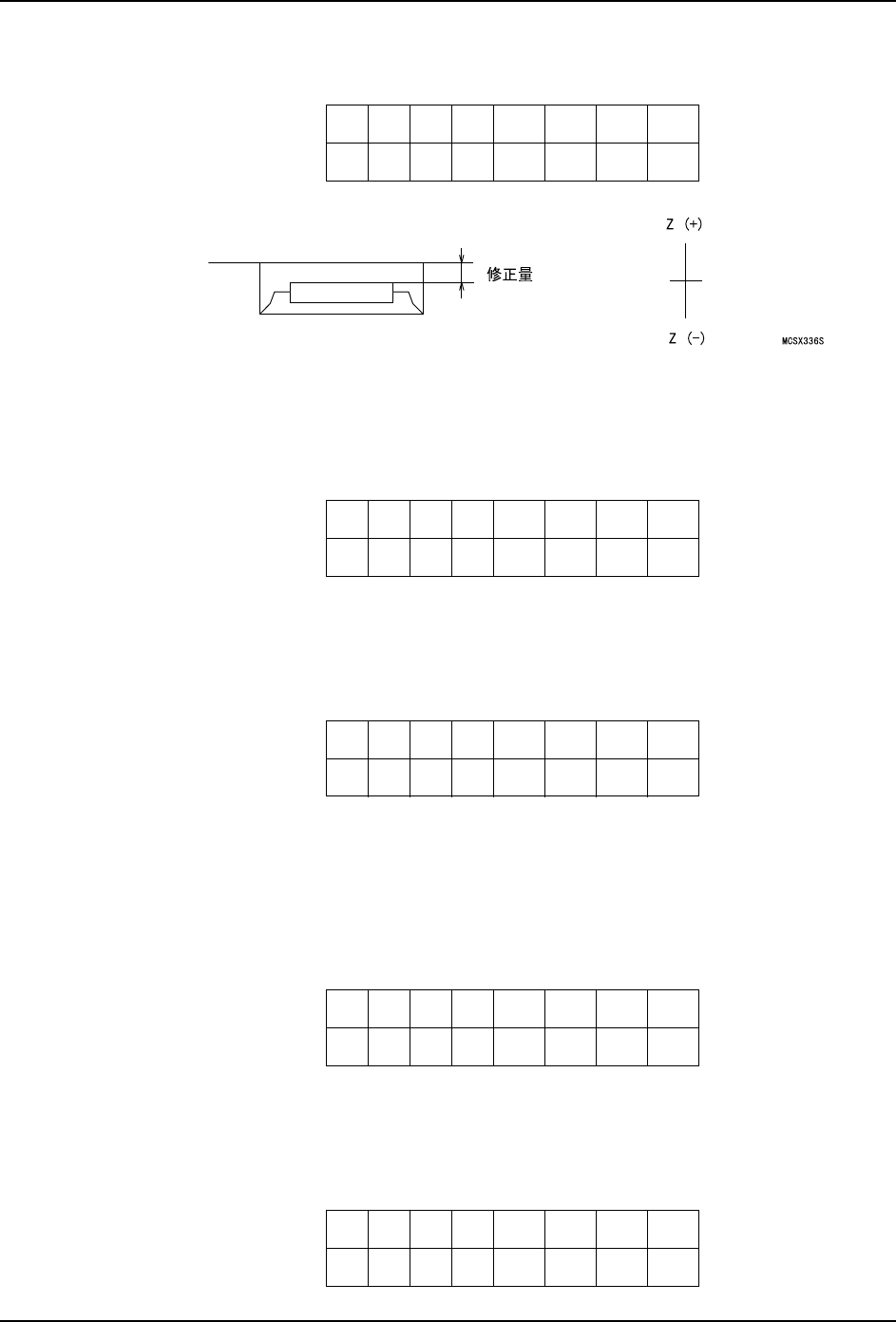
例如,要向下修正 1mm 时请输入 “-1”。
对应 Vision Type
i. Pick-up Tolerance X,Pick-up Tolerance Y(0.00 ~ 9.99 mm)
设定 X、Y 方向各自元件的吸取偏差公差值。
请把元件中心和吸嘴中心的偏差看作正常的范围进行设定。
设定值在 「0.00」的时候不进行检查。
对应 Vision Type
j. Pick-up Tolerance Q(0 ~ 45 度 )
设定元件吸取偏差公差值。
设定值 「0」的时候不进行检查。
对应 Vision Type
k. Soft Pick Speed(0.0 ~ 10.0)
为减轻进行吸取动作时对元件造成的冲击,而设定 Z 轴下降和上升的速度。(0.0 ~
10.0) 值越小速度越慢。输入 0 时,机器判断为 10.0。吸取时取这个输入值和 Slow
Place Speed 两者中较慢的数据为有效值。吸取元件期间,那 2 个数值和 「Part
Transport Speed」的数值中最慢的速度为有效值。
对应 Vision Type
l. Pick-up Orientation Q(0.0 ~ 359.99 度 )
在特殊吸嘴和机械夹具等中,有必须在吸取时预先使其旋转的元件时,输入旋转角
度。吸取的元件的基准方向是 「Direction 0」。
对应 Vision Type
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
PRG-XPF-1.0S 6. 编辑程序
XPF 编程手册 255
m. Tray Pick Offset Z(-25.4 ~ 12.7 mm)
在元件的吸取面与料盘表面的高度有差异时,设定吸取时候的 Z 方向的修正值。
对应 Vision Type
n. Tray Shuttle Speed
将在料盘单元及料盘往复臂内的料盘的移动速度从下述中选择。
对应 Vision Type
o. Placing Offset X(-100.00 ~ 100.00 mm)
对于较重元件,根据从吸取到贴装之间的传送速度有可能使吸嘴产生偏移。为防止因
传送速度过快引起偏移,请将此值尽量设定得比较小。
在此设定的速度适用于机器在持有元件期间的全部的伺服轴的速度。将输入 “0”时
作为 100%,在吸取元件期间,此值和 Soft Pick Speed、Slow Place Speed、Soft
Place Speed 中的最慢的速度为有效。
对应 Vision Type
p. Placing Offset X(-100.00 ~ 100.00 mm)
设定 X 方向的贴装修正值。设定这个数值后,在以顺序指定的坐标里 90 加上修正值
的位置上贴装。
元件的方向以 「Direction 0」并且贴装角度为 0 度的时候作为基准。
对应 Vision Type
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
Hi 4 快
Mid 3
Lo 2
ULo 1 慢
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
MCSX337
Z (+)
(-)
6. 编辑程序 PRG-XPF-1.0S
256 XPF 编程手册
q. Placing Offset Y(-100.00 ~ 100.00 mm)
设定这个数值后,在以顺序指定的坐标里 90 加上修正值的位置上贴装。元件的方向
以 「Direction 0」并且贴装角度为 0 度的时候作为基准。
对应 Vision Type
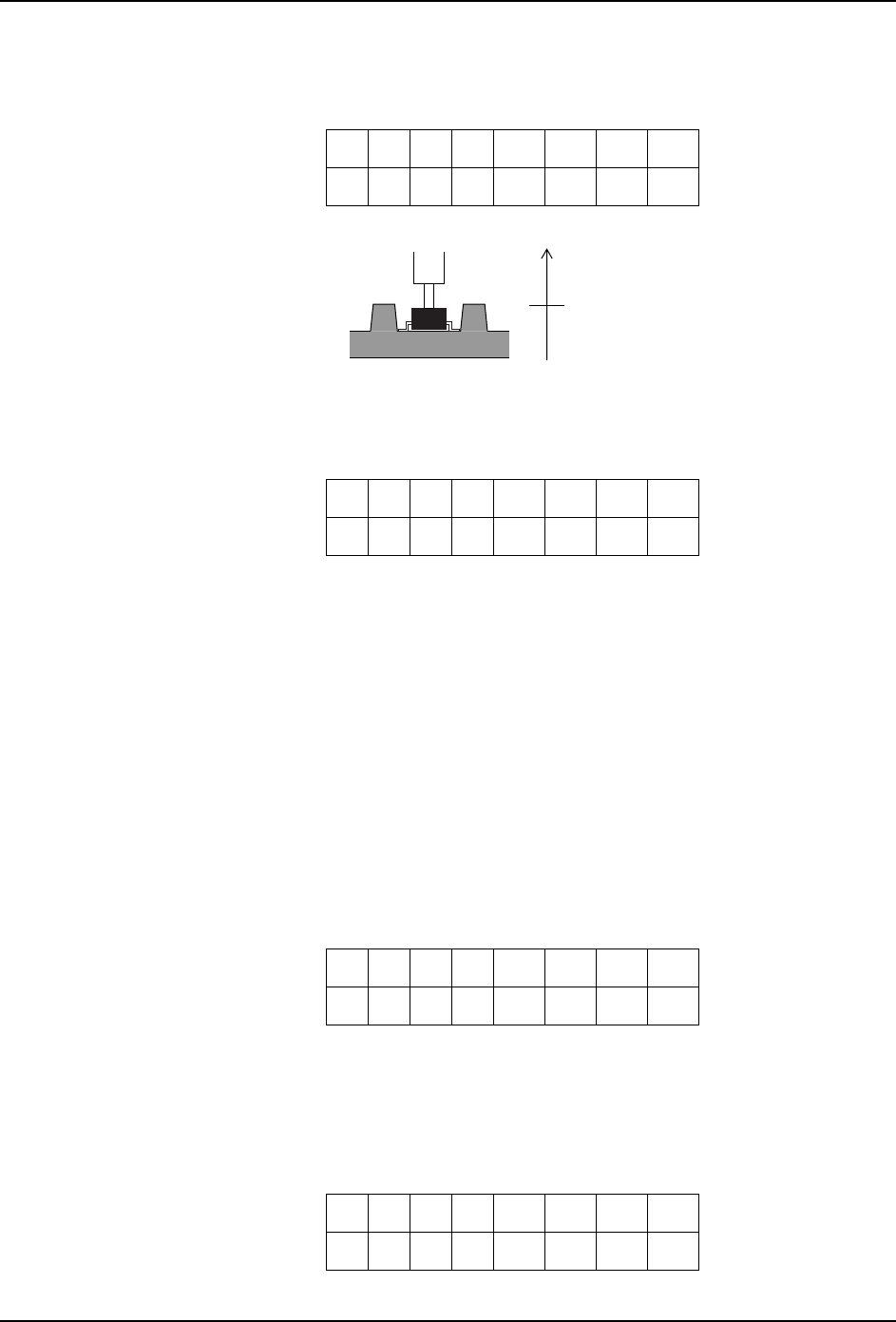
r. Placing Offset Z(-20.00 ~ 20.00 mm)
设定贴装时将元件压在电路板上时的冲程量。以 「0」输入时仅压下 0.3mm。
对应 Vision Type
s. Placing Mode
指定移向元件贴装坐标时各伺服轴的到达精度。
当选择重视贴装速度时选 「2」,重视贴装精度时选 「1」。
对应 Vision Type
t. Slow Place Speed(0% ~ 100%)
设定从吸取到贴装过程中 Z 轴上升和下降的速度。减轻吸取或贴装时对元件的冲击。
值越小速度越慢。输入 「0」时,机器判断为 「100」。
还有,吸取时取此值和 「Soft Place Speed」中慢的速度为有效值。吸取元件期间、
「Part Transport Speed」也需考虑,取这些数据中最慢的速度为有效值。另外,贴
装时取此值和 「Soft Place Speed」中慢的速度为有效值。
对应 Vision Type
u. Soft Place Speed(0.0 ~ 10.0)
设定贴装时 Z 轴下降和上升的速度。
减轻贴装时对元件的冲击。值越小速度越慢。输入 「0」时,机器判断为 「10.0」。
贴装时取这个值和 「Slow Place Speed」两者中较慢的数据为有效值。吸取元件期
间,「Part Transport Speed」也需考虑,取这些数据中最慢的速度为有效值。
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
10 18 19 20 100 124 180 230
○○○○○○○○
Standard: 0 Vision Type 不到 100 时,以低精度模式进行贴装。Vision Type 在
100 以上时,以高精度模式进行贴装。
Fine-Slow: 1 以高精度模式进行贴装。
Fine-Fast: 2 以低精度模式进行贴装。
10 18 19 20 100 124 180 230
○○○○○○○○