CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第165页
CACCIA Handbuch 1 Caccia Bedienungskurzanleitung Ausgabe 04/2007 73 Affected R ange 1 Hier legen Sie die Adressbereiche fest, we lche über den T race erfasst werden : 1 1 1 Decode 1 Setzen Sie bei De code ein Häkchen wen…
1 Caccia Bedienungskurzanleitung CACCIA Handbuch
Ausgabe 04/2007
72
1
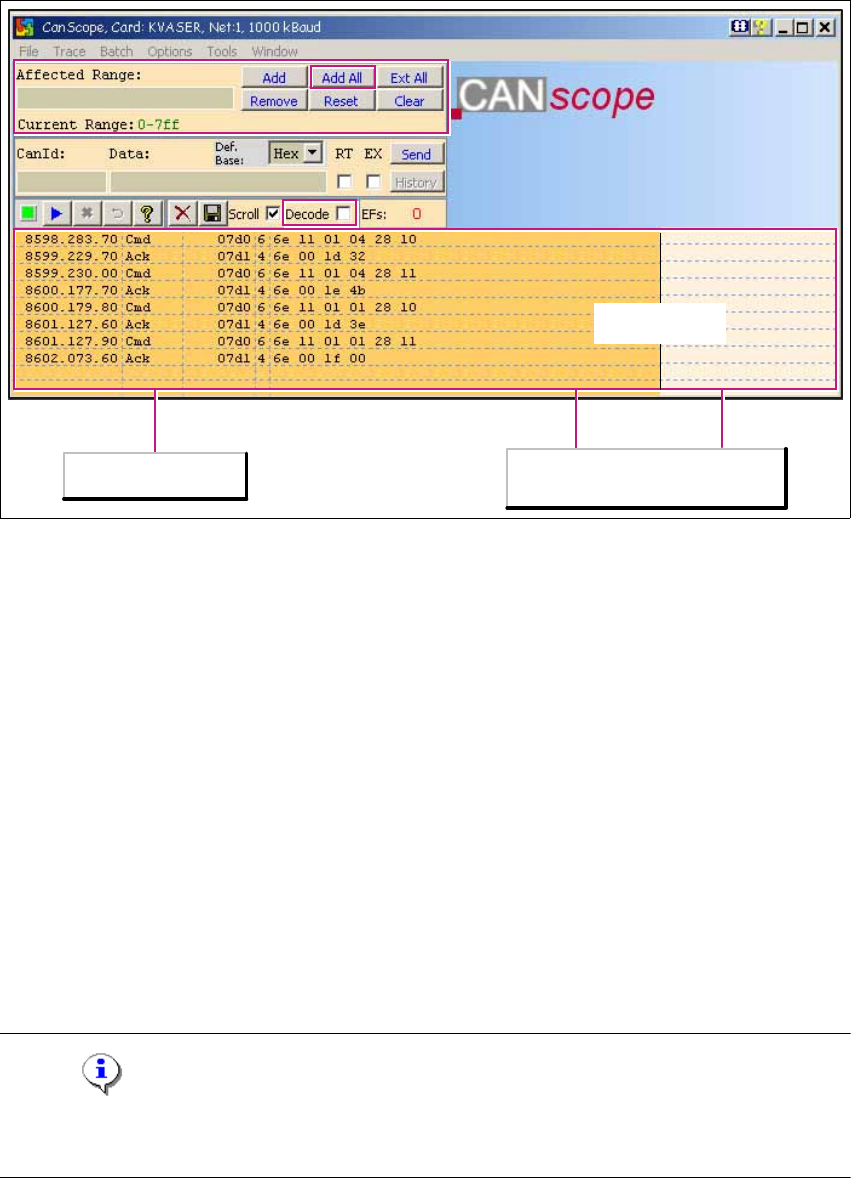
Abb. 1 - 46 Dialogfenster CanScope
→ Betätigen Sie in beiden Dialogfenstern CanScope (Netz 1 und Netz 2) die Schaltfläche Add
All, es werden die Kommunikationsprotokolle aller CAN-Telegramme mitgeschrieben.
→ Um die Aufzeichnung zu starten, wählen Sie den Menüpunkt Trace - Start Trace. Es öffnet
sich das Dialogfenster Datei speichern unter. Wählen Sie hier den Dateipfad und den Datei-
namen aus, unter denen der Trace gespeichert werden soll.
→ Schalten Sie jetzt die Maschine ein, die Kommunikation zu den Subsystemen wird über die
entsprechenden CAN-Kommandos aufgebaut.
Die Aufzeichnung ist gestartet. Optisch ist dies an der Orangefärbung des Aufzeichnungsfel-
des erkennbar. Läuft keine Aufzeichnung, so erscheint das Aufzeichnungsfeld in einem hellen
Beige. 1
Der Inhalt des Aufzeichnungsfeldes wird während der Aufzeichnung in die vorher bestimmte
Datei geschrieben. 1
→ Um die Aufzeichnung anzuhalten, wählen Sie den Menüpunkt Trace - Stop Trace.
Hinweis
Mit Hilfe der Trace-Datei kann der Entwickler erkennen, welches Subsystem sich nicht gemeldet
hat. Anhand der Fehlermeldung ist ersichtlich, wo das Problem liegt. 1
1
Aufzeichung
inaktivaktiv
Aufzeichnungsfeld
Links (orange): Aufzeichung aktiv
Rechts (beige): Keine Aufzeichnung
CACCIA Handbuch 1 Caccia Bedienungskurzanleitung
Ausgabe 04/2007
73
Affected Range 1
Hier legen Sie die Adressbereiche fest, welche über den Trace erfasst werden: 1
1
1
Decode 1
Setzen Sie bei Decode ein Häkchen wenn Sie im Aufzeichnungsfeld die Zahlenreihen der rechten
Spalte in kurzen Klartextpassagen darstellen wollen. 1
Hinweis
Diese Option ist nicht für die Ferndiagnose durch die Entwicklung geeignet. 1
→ Beenden Sie die Aufzeichnung über das Menü Trace - Stop Trace. Das Aufzeichnungsfeld
nimmt wieder die beige Färbung an.
→ Wenn Sie das Dialogfenster CanScope verlassen, bleibt der zuletzt gewählte Dateipfad als
Vorschlagswert bis zum nächsten Aufruf erhalten.
1
Beispiel:
Inhalt der Datei: CAN-Kontrollfenster Netz 1 @11_03_2005_16_56_08.txt
(Dieser Dateiname wurde automatisch vergeben.) 1
T: 257122.779.20 CanId: 07d0 L: 6 Data: 6e 11 01 04 28 10
T: 257122.779.60 CanId: 07d1 L: 4 Data: 6e 00 1d 32
T: 257123.725.50 CanId: 07d0 L: 6 Data: 6e 11 01 04 28 11
T: 257123.725.80 CanId: 07d1 L: 4 Data: 6e 00 1e 4b
T: 257124.671.40 CanId: 07d0 L: 6 Data: 6e 11 01 01 28 10
1
Add All
Die Kommunikationsprotokolle aller CAN-Telegramme werden mitgeschrie-
ben.
Hinweis: Die Auswertung kann bei Auswahl dieser Option sehr umfangreich
werden.
1 Caccia Bedienungskurzanleitung CACCIA Handbuch
Ausgabe 04/2007
74
1.11 One Wire Bus
Mit Einführung des Message-Loop in der SW 505 (601) wurde es notwendig die Anzahl der Ein-
und Ausgänge zu reduzieren oder ein zusätzliches E/A Modul zu installieren. Aufgrund der Platz-
situation in der Maschine und Kostengründen, wurde das "One Wire Bus - System eingeführt.
Der One Wire Bus steuert den Pipettenwechsler in allen 4 Sektoren, überträgt die Temperatur-
werte der Sensoren an den Kopfplatten und ließt die Portaldaten aus.
Aufgaben:
(1) Steuerung Pipettenwechsler 6/12 C&P Köpfe (1.und 2. Reihe)
(2) Steuerung Pipettenwechsler 20 C&P Köpfe (1.und 2. Reihe), mit Magazinabfrage
(3) 2 Temperatursensoren je Portal an der Kopfplatte befestigt.
(4) Speicherung der Portalidentifizierung auf einem EEPROM
(Es wird zwischen Platten-Portal CFK 02, DTC- Portal CFK 04 und dem Portal CFK 06 unter-
schieden. Daraus folgt, das je nach Portaltyp eine andere Maschinendatenbank für die Dyna-
mikparameter der Hauptachsen geladen wird).
(5) Option: Abfrage der Abwurfbehälter in allen 4 Sektoren
1.11.1 Aufbau One Wire Bus
Wie der Name schon sagt werden die Daten über eine Ader übertragen. Die Daten werden also
seriell an das Subsystem gesendet.
Der One Wire Bus wird bei zeitunkritischem Abläufen eingesetzt und lässt sich als single Master
Bus mit „beliebig“ vielen Slaves (Teilnehmern) realisieren.