CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第284页
1 - 75 Siplace C AN T est Box Ausgabe 0 4/2008 1 CAN T est B ox 75 1.10.9.1 1 CAN Bus Siplace X4I Bei de r Siplac e X4I mit d er S tationssoftware 7 01 gib t es nur ein e Konfigu ration i n Bezug a uf die Subsys teme. D.…
1 - 74
Siplace CAN Test Box
1 CAN Test Box Ausgabe 04/2008
74
CAN Bus Struktur X4 variante 03
V i s i o n c o n t r o l
0 0 3 6 3 9 6 1 ( q d )
C A N
X 2 q d
X 2 q d
D o c k i n g u n i t 2 D o c k i n g u n i t 1
X 1 2 5X 1 2 6
C A N I NC A N O U T
X 1 1 5X 1 1 6
C A N I NC A N O U T
C A N
P C B c o n t r o l
X 2 2 a o
X 2 2 a o
C A N I / O - m o d u l e 0 0 3 5 5 0 5 1 ( q b )
0 3 0 1 0 0 5 0
C A N
0 3 0 1 0 0 5 1
X 2 r d
X 1 4 5
C A N I N
S o
A x i s u n i t
0 3 0 5 0 3 6 5
X 3 0 _ 2 s q
C A N
D o c k i n g u n i t 3
X 1 3 6
C A N O U T
X 4 0 c a
C A N
X 2 r d
C A N
V i s i o n c o n t r o l
0 0 3 6 3 9 6 1 ( r d )
D o c k i n g u n i t 4
( c a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 1 2
P 3
0 3 0 1 0 0 5 4
X 1 3 5
C A N I N
X 6 8
A m b i e n t p r e s s u r e s e n s o r
P n e u m a t i c u n i t
P l a c e m e n t a r e a 2
P l a c e m e n t a r e a 1
C A N b u s w i r i n g
w i r e n o . w i r i n g S u b - D - P I N
1 " 1 - W i r e " 1
2 G N D 6
3 C A N _ L 2
4 C A N _ H 7
5 G N D 3
6 R E S E T 8
7 P o w e r F a i l 4
8 f r e e 9
9
C A N _ I N T 5
C A N
X 3 0 _ 2 s q
X 3 0 _ 1 s q
X 3 0 _ 1 s q
X 3 0 _ 2 t q X 3 0 _ 1 t q
X 1 4 6
C A N O U T
C A N I / O m o d u l e 0 0 3 5 5 0 5 1 ( r b )
X 4 0 a a
( a a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 1 2
P 1
0 3 0 1 0 0 5 9
X 4 0 c a
X 4 0 b a
0 3 0 1 0 0 5 3
X 4 0 a a
X 1 r b
X 1 q bX 6 q f
X 6 q f
C A N
X 2 q f
I n t e r f a c e 1 - W i r e C A T 5 ( q f )
0 3 0 4 1 5 7 8
M a i n d i s t r i b u t o r 0 3 0 4 6 2 2 5 ( q a )
X 6 r f
X 6 r f
X 1 2 p n X 1 1 p n
X 7 p n
C A N c a r d
X 6 p n
C A N b u s 1C A N b u s 2
C A N
0 3 0 4 1 5 7 8
I n t e r f a c e 1 - W i r e C A T 5 ( r f )
X 2 r f
S u b d i s t r i b u t o r 0 3 0 4 6 2 2 6 ( r a )
S o
S o
S o
S o
S o
S o
S oS o
S o S o
S o
S o P i nP i n
P i n P i nS oS o
S o
S o
M a c h i n e
c o n t r o l l e r
0 3 0 5 2 0 3 2
0 3 0 5 7 1 4 5
P a t c h c a b l e 5 m
X 1 f e
0 3 0 5 7 1 4 5
P a t c h c a b l e 5 m
C A N
2 / 3
X 3 0 _ 2 t q X 3 0 _ 1 t q
C A N
0 3 0 1 0 0 5 2
X 3 0 _ 1 s q
s p a r e
X 4 0 d a
C A N
( d a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 2 2
P 4
X 4 h e
C A N I n
X 5 h e
X 2 h eX 1 h e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( f e )
C A N I n
X 5 f e
X 4 f e
X 2 f e X 1 f e
X 4 k e
C A N I n
X 4 0 d a
S o
X 5 k e
X 2 k e
X 1 k e X 2 k e
S w i t c h p o s . : t o p
X 2 f e
C A N
X 4 0 b a
( b a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 2 2
P 2
X 1 g eX 2 g e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( g e )
S w i t c h p o s . : t o p
C A N I n
X 5 g e
X 4 g e
X 2 g eX 2 h e
0 3 0 4 2 3 4 7
1 - w i r e b r i d g e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( h e )
S w i t c h p o s . : b o t t o m
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( k e )
S w i t c h p
o s . : b o t t o m
0 3 0 4 2 3 4 7
1 - w i r e b r i d g e
A x i s u n i t 1 / 4
0 3 0 5 0 3 6 5
X 1 h e
1 - 75
Siplace CAN Test Box
Ausgabe 04/2008 1 CAN Test Box
75
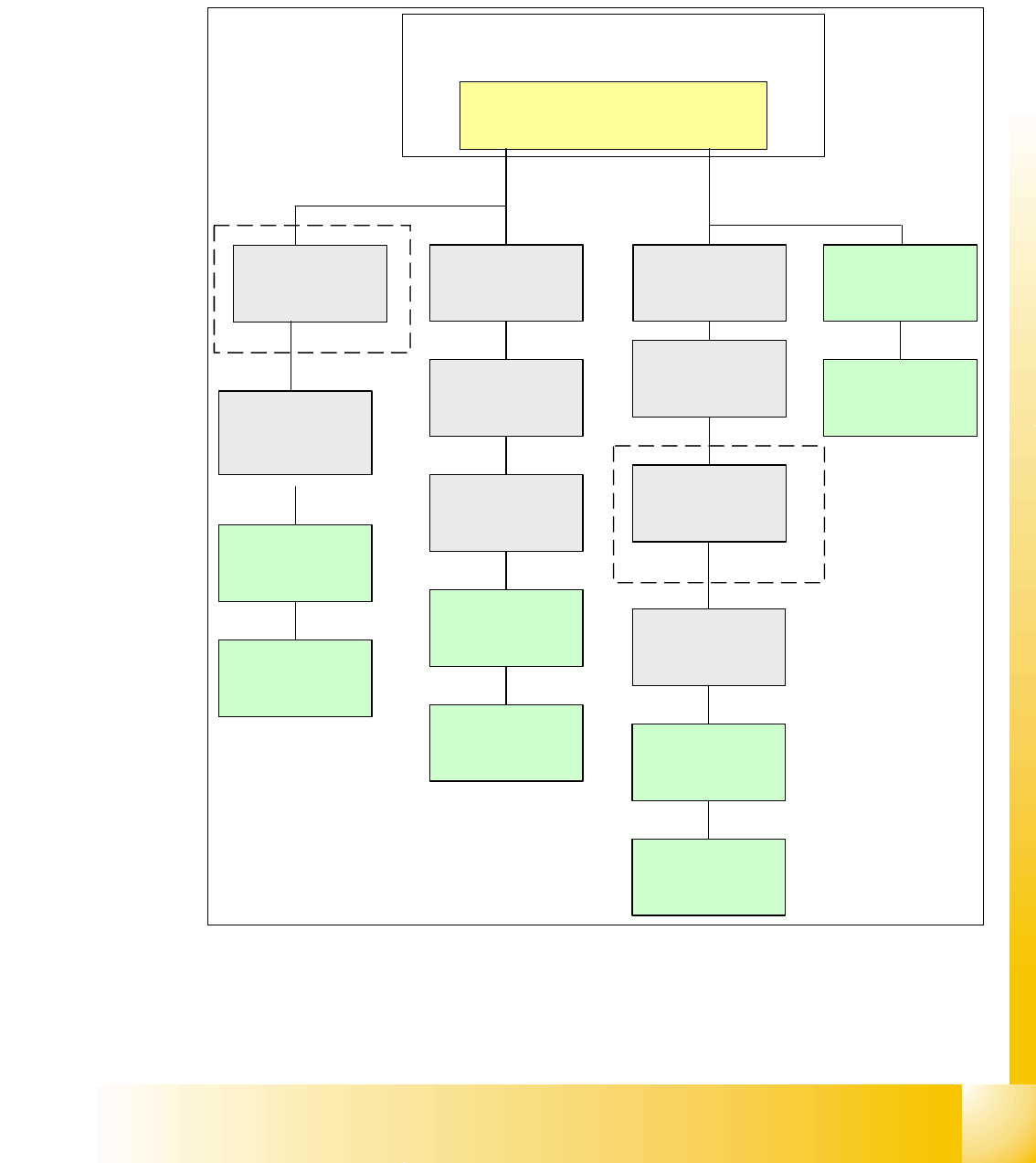
1.10.9.11 CAN Bus Siplace X4I
Bei der Siplace X4I mit der Stationssoftware 701 gibt es nur eine Konfiguration in Bezug auf die
Subsysteme. D.h. Das Schneidgerät und der PPW werden über den CAN Knoten gesteuert und
es ist kein MTC2 und keine stationären Kameras möglich. Somit ergibt sich die unten abgebildete
CAN Bus struktur.
Abb. 1.10 - 49 CAN Bus Struktur X4I
C
O
M
U
n
i
t
1
6
8
CAN Bus cable
PA 1
X6pn
Trailing Interface
Gantry 1
Transport
Control unit
COT 1
CAN node
(Tape cutter, NC)
Axis unit
PA 1
CAN I/O
Sub Module
SUB Distributor Sector 4
Trailing Interface
Gantry 4
Head board(C500)
Gantry 4
Terminator
(120 OHM)
Head board(C500)
Gantry 1
Terminator
(120 OHM)
CAN Bus cable
PA 2
X7pn
Main Distributor Sector 2
Axis unit
PA 2
CAN I/O
Main Module
COT 2
CAN node
(Tape cutter, NC)
Trailing Interface
Gantry 2
Trailing Interface
Gantry 3
Head board(C500)
Gantry 2
Terminator
(120 OHM)
Head board(C500)
Gantry 3
Terminator
(120 OHM)
COT 3
CAN node
(Tape cutter, NC)
COT 4
CAN node
(Tape cutter, NC)
Stationcomputer (Box PC)
1 - 76
Siplace CAN Test Box
1 CAN Test Box Ausgabe 04/2008
76
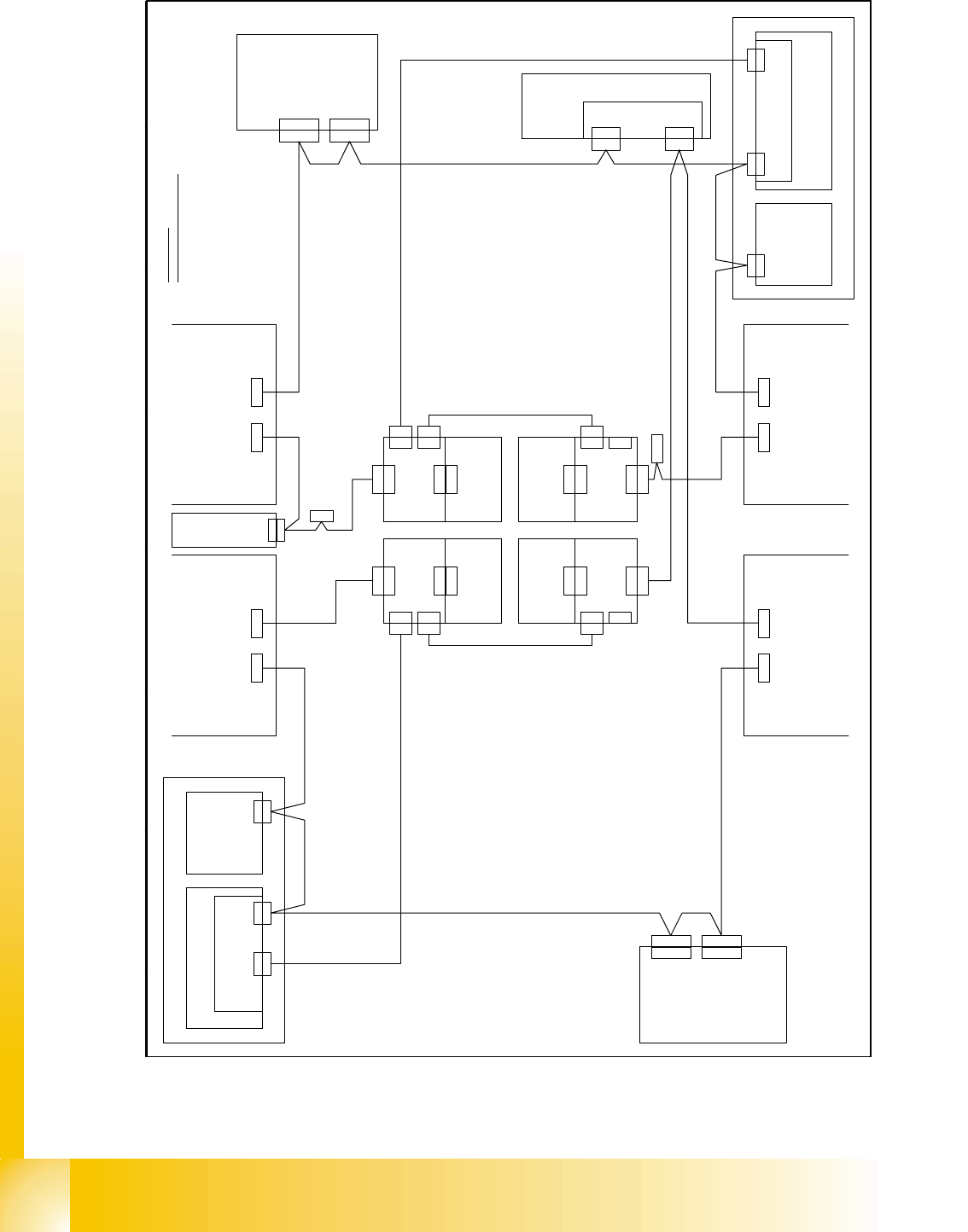
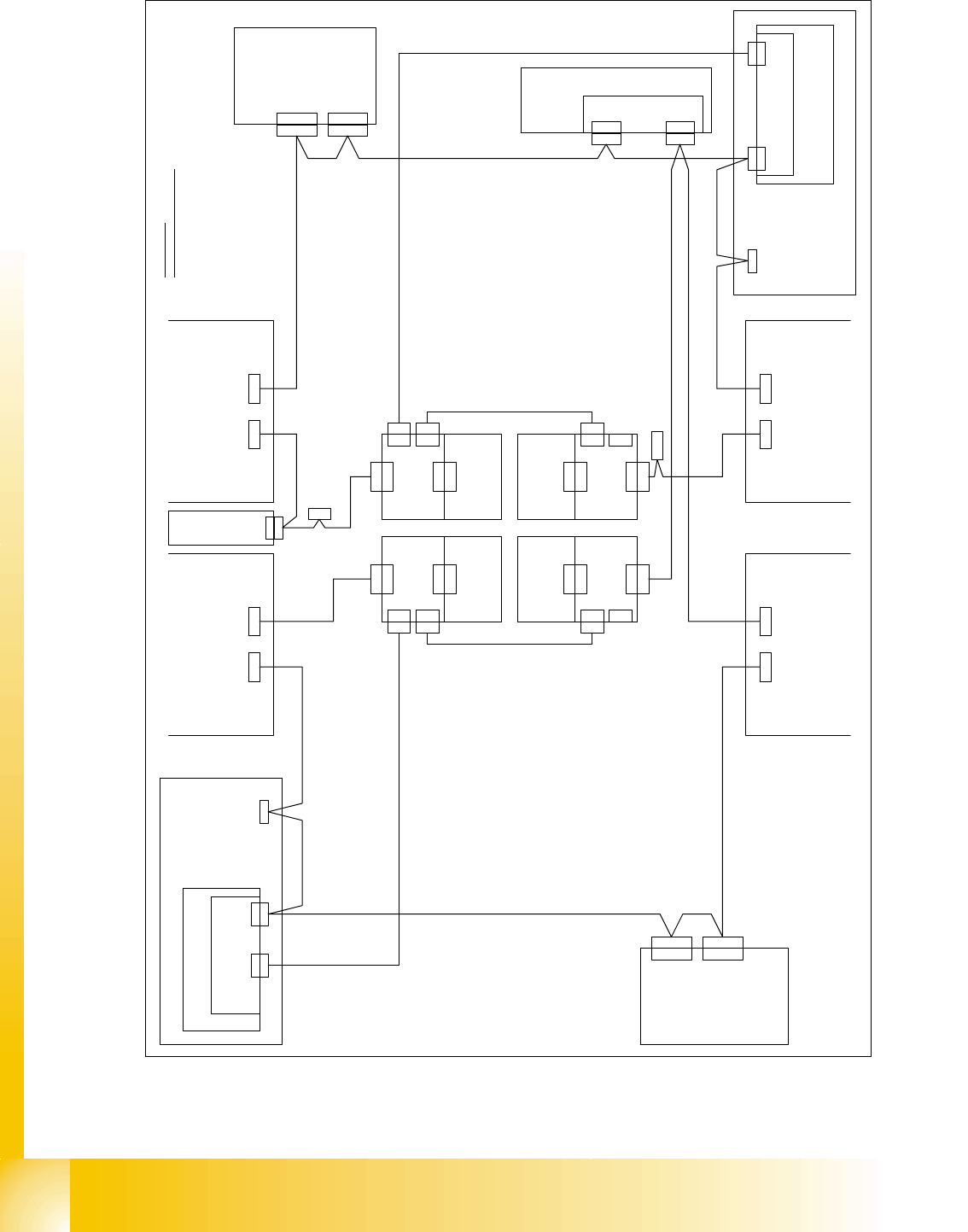
Abb. 1.10 - 50 CAN Bus Struktur X4I Stromlaufplan
X 2 q d
D o c k i n g u n i t 2 D o c k i n g u n i t 1
X 1 2 5X 1 2 6
C A N I NC A N O U T
X 1 1 5X 1 1 6
C A N I NC A N O U T
C A N
P C B c o n t r o l
X 2 2 a o
X 2 2 a o
C A N I / O - m o d u l e 0 0 3 5 5 0 5 1 ( q b )
0 3 0 1 0 0 5 0
C A N
0 3 0 1 0 0 5 1
X 2 r d
X 1 4 5
C A N I N
A x i s u n i t
0 3 0 5 0 3 6 5
X 3 0 _ 2 s q
C A N
D o c k i n g u n i t 3
X 1 3 6
C A N O U T
X 4 0 c a
C A N
D o c k i n g u n i t 4
( c a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 1 2
P 3
0 3 0 1 0 0 5 4
X 1 3 5
C A N I N
X 6 8
A m b i e n t p r e s s u r e s e n s o r
P n e u m a t i c u n i t
P l a c e m e n t a r e a 2
P l a c e m e n t a r e a 1
C A N b u s w i r i n g
w i r e n o . w i r i n g S u b - D - P I N
1 " 1 - W i r e " 1
2 G N D 6
3 C A N _ L 2
4 C A N _ H 7
5 G N D 3
6 R E S E T 8
7 P o w e r F a i l 4
8 f r e e 9
9
C A N _ I N T 5
C A N
X 3 0 _ 2 s q
X 3 0 _ 1 s q
X 3 0 _ 1 s q
X 3 0 _ 2 t q X 3 0 _ 1 t q
X 1 4 6
C A N O U T
C A N I / O m o d u l e 0 0 3 5 5 0 5 1 ( r b )
X 4 0 a a
( a a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 1 2
P 1
0 3 0 1 0 0 5 9
X 4 0 c a
X 4 0 b a
0 3 0 1 0 0 5 3
X 4 0 a a
X 1 r b
X 1 q bX 6 q f
X 6 q f
C A N
X 2 q f
I n t e r f a c e 1 - W i r e C A T 5 ( q f )
0 3 0 4 1 5 7 8
M a i n d i s t r i b u t o r 0 3 0 4 6 2 2 5 ( q a )
X 6 r f
X 6 r f
X 1 2 p n X 1 1 p n
X 7 p n
C A N c a r d
X 6 p n
C A N b u s 1C A N b u s 2
C A N
0 3 0 4 1 5 7 8
I n t e r f a c e 1 - W i r e C A T 5 ( r f )
X 2 r f
S u b d i s t r i b u t o r 0 3 0 4 6 2 2 6 ( r a )
S o
S o
S o
S o
S o
S o
S oS o
S o S o
S o
S o P i nP i n
P i n P i nS o
S o
S o
M a c h i n e
c o n t r o l l e r
0 3 0 5 2 0 3 2
C A N
2 / 3
X 3 0 _ 2 t q X 3 0 _ 1 t q
C A N
0 3 0 1 0 0 5 2
X 3 0 _ 1 s q
s p a r e
X 4 0 d a
C A N
( d a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 2 2
P 4
X 4 h e
C A N I n
X 5 h e
X 2 h eX 1 h e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( f e )
C A N I n
X 5 f e
X 4 f e
X 2 f e X 1 f e
X 1 f e
X 4 k e
C A N I n
X 4 0 d a
S o
X 5 k e
X 2 k e
X 1 k e X 2 k e
S w i t c h p o s . : t o p
X 2 f e
C A N
X 4 0 b a
( b a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 2 2
P 2
X 1 g eX 2 g e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( g e )
S w i t c h p o s . : t o p
C A N I n
X 5 g e
X 4 g e
X 2 g eX 2 h e
0 3 0 4 2 3 4 7
1 - w i r e b r i d g e
X 1 g e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( h e )
S w i t c h p o s . : b o t t o m
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( k e )
S w i t c h p
o s . : b o t t o m
0 3 0 4 2 3 4 7
1 - w i r e b r i d g e
A x i s u n i t 1 / 4
0 3 0 5 0 3 6 5
0 3 0 5 7 1 4 5
P a t c h c a b l e 5 m
0 3 0 5 7 1 4 5
P a t c h c a b l e 5 m