CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第45页
1 - 19 S tudent Guid e CAN BU S Wor kshop Ausgabe 0 6/2008 2 Komm unikation un d S teuerung 19 2.2.7.2 CAN-Bus gesteuerte Funkti onen am C&P 20 Kop f Die folgen de Übers icht zeigt ver schie dene Kopffunktione n, die…

1 - 18
Student Guide CAN BUS Workshop
2 Kommunikation und Steuerung Ausgabe 06/2008
18
2.2.7 CAN-Bus Prozessorboard
Das Can-Bus Prozessorboard TQM 167LC ist auf der Kopfplatine C500 aufgesteckt. Das Prozes-
sorboard wird an verschiedenen Stellen in der Maschine eingesetzt. Befindet sich das Prozessor-
board auf der Kopfplatine, sorgt die Firmware auf dem Prozessorboard für die Steuerung der
kopfspezifischen Aktoren und Sensoren, egal welcher Kopftyp installiert ist.
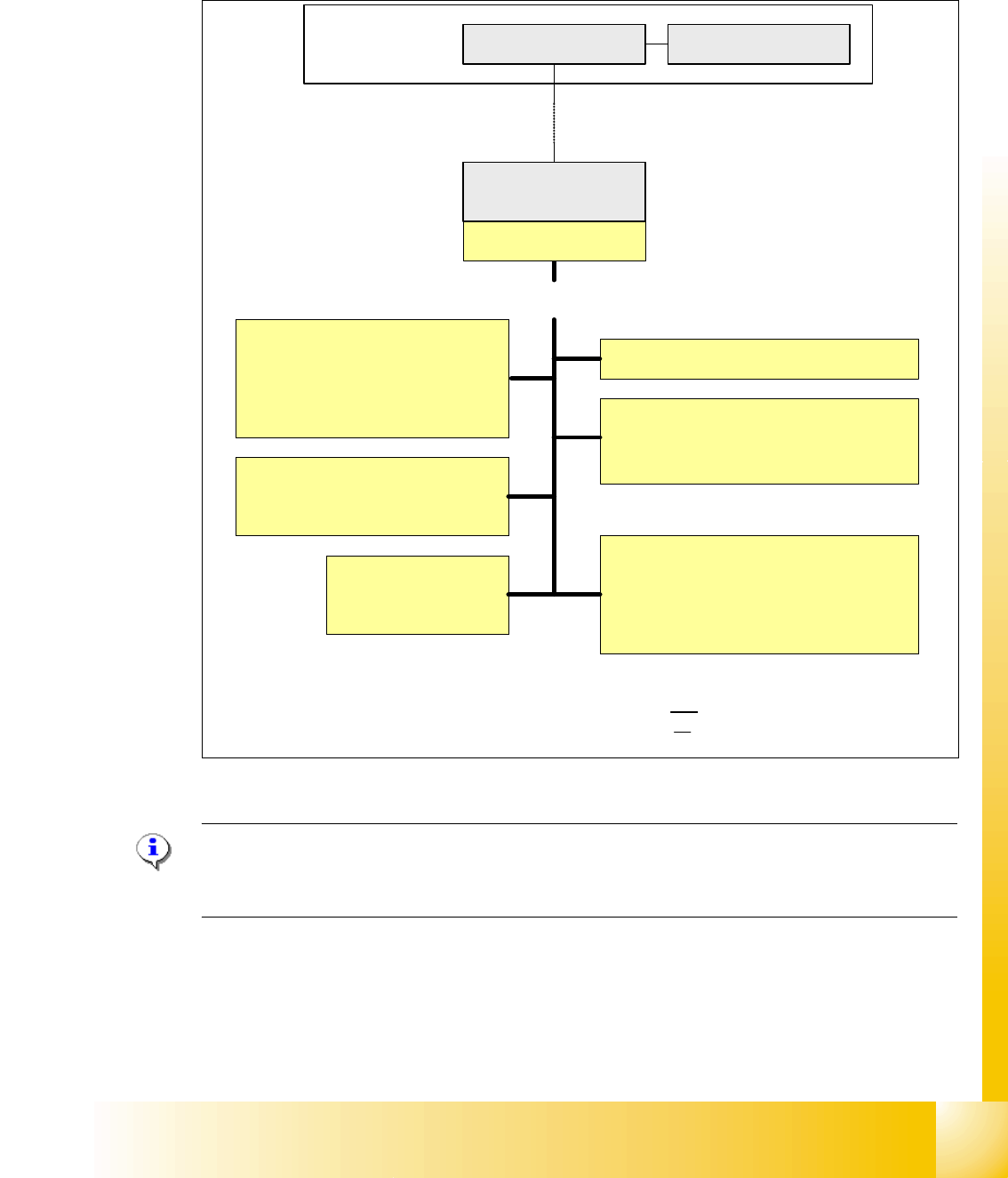
2.2.7.1 CAN-Bus gesteuerte Funktionen am 6/12C&P Kopf
Die folgende Übersicht zeigt verschiedene Kopffunktionen, die über das CAN-System gesteuert
werden. Der CAN-Bus steuert damit die Aktoren und Sensoren des C&P Kopfes.
Abb. 2.2 - 8 CAN Bus gesteuerte Funktion am C&P Kopf
Hinweis:
Über die 7-Segment-Anzeige wird der Status des 16 Bit PROZESSORBOARDS angezeigt.
Normaler Betriebszustand: " . " blinkt. (Beschreibung siehe Kapitel C&P Kopf). 2
BE-Sensor
CAN Bus 16 Bit Prozessorboard
SM Abwurf
:
LS oben
LS unten Magnetventil
Balsluft
:
CAN bus
SM
einschwenkden
Dp-Station
SM Abholen /
Bestücken
Vakuumwerte
Kommunikationsboard
LS = Lichtschranke
SM = Schrittmotor
BE-Sensor = Bauelemente Sensor
1 - 19
Student Guide CAN BUS Workshop
Ausgabe 06/2008 2 Kommunikation und Steuerung
19
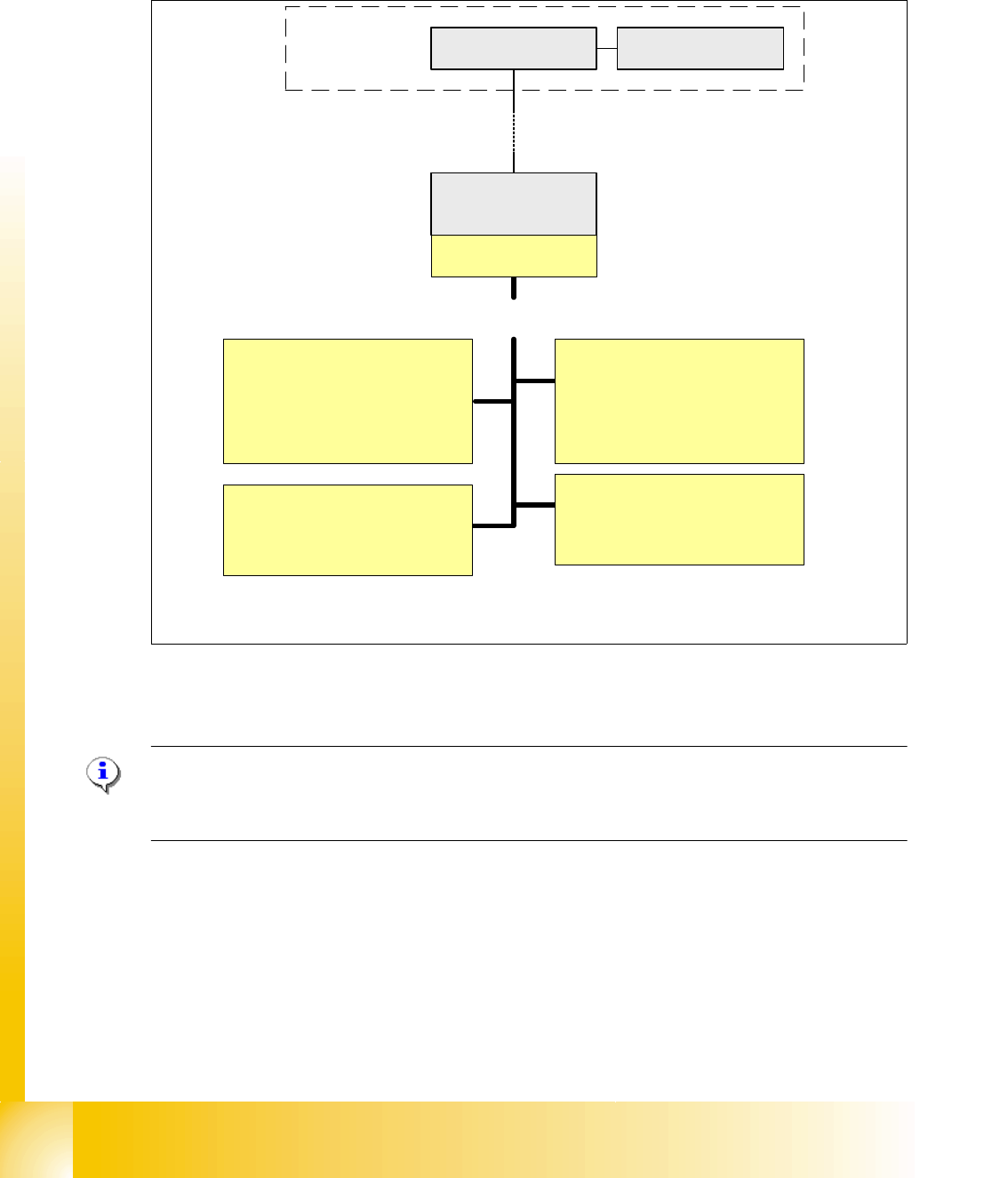
2.2.7.2 CAN-Bus gesteuerte Funktionen am C&P 20 Kopf
Die folgende Übersicht zeigt verschiedene Kopffunktionen, die über das CAN-System gesteuert
werden. Der CAN-Bus steuert damit die Aktoren und Sensoren des C&P Kopfes.
Abb. 2.2 - 9 Kommunikation TQM Modul am C&P 20 Kopf
Hinweis:
Über die 7-Segment-Anzeige wird der Status des 16 Bit PROZESSORBOARDS angezeigt.
Normaler Betriebszustand: " . " blinkt. (Beschreibung siehe Kapitel C&P Kopf). 2
Abhol/Bestückposition
1. Einstellen Vakuum/Blasluft
2. Messen Vakuum/Blasluft
3. Abwerfen
Haltekreis
1. Überwachung Vakuum
2. Messen Vakuum
BE-Sensors
1. Initialisierung
2. Kalibrierung
EEPROM
1. NPK Z-Achse
2. NPK Stern-Achse
3. weitere kopfspezifische Daten
Computer Unit
COM Board
Maschinen- CAN
Bus (1MBit/s)
Steuerung der folgenden Funktionen
MC
Kopfprozessor
C500
TQM-Modul
Lichtschranke unten
1. Aktivierung der LS unten
Auswertung LS unten erfolgt direkt
auf der A363
Steuerung Kopf-Can Bus
Auswertung BE-Sensor erfolgt
direkt auf der A363
NPK = Nullpunktkorrektur
TQM = TQ Firmenname
M Modul
TQM = 16 Bit Prozessor
1 - 20
Student Guide CAN BUS Workshop
2 Kommunikation und Steuerung Ausgabe 06/2008
20
2.2.7.3 CAN-Bus gesteuerte Funktionen am Twin head
Die CAN-Bus Prozessor-Platine ist nicht wie bei den HF Maschinen auf je einem Twin Segment,
sondern befindet sich jetzt zentral auf der Kopfprozesssorplatine C500.
Abb. 2.2 - 10 Funktionen Can Bus Prozessorboard am Twin Head
Hinweis:
Über die 7-Segment-Anzeige wird der Status des 16 Bit PROZESSORBOARDS angezeigt.
Normaler Betriebszustand: " . " blinkt. (Beschreibung siehe Kapitel C&P Kopf). 2
Druckregelventil Segment 1
1. Einstellen Vakuum/Blasluft
2. Messen Vakuum/Blasluft
3. Abwerfen
Computer Unit
COM Board
Maschinen- CAN
Bus (1MBit/s)
Steuerung der folgenden Funktionen
MC
Kopfprozessor
C500
TQM-Modul
Druckregelventil Segment 2
1. Einstellen Vakuum/Blasluft
2. Messen Vakuum/Blasluft
3. Abwerfen
Kraftmessplatine Segment 1
1. Aktivierung
Auswertung der Kraftmessung
erfolgt direkt auf der A363
Auswertung der Kraftmessung
erfolgt direkt auf der A363
Kraftmessplatine Segment 2
1. Aktivierung