CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第55页
1 - 29 S tudent Guid e CAN BU S Wor kshop Ausgabe 0 6/2008 2 Komm unikation un d S teuerung 29 2.2.10 Kommunikation Siplace V ision Die Komm unika tion zwisc hen den ei nzelnen Re chnern erfolgt ü ber LAN-Ka bel, wobei d…
1 - 28
Student Guide CAN BUS Workshop
2 Kommunikation und Steuerung Ausgabe 06/2008
28
2.2.9 CAN-Bus Kommunikation mit der Achsansteuerung
In früheren SIPLACE-Maschinen erfolgte die Kommunikation und der Datenfluss zwischen Achs-
und Maschinensteuerung mittels SMP-Bus. Ab der HF-Generation wird der SMP-Bus nicht mehr
mit dem Achssystem verwendet.
Die Kommunikation zwischen den Achssteuerungen erfolgt jetzt über den CAN-Bus. Alle Informa-
tionen, die zwischen diesen Modulen ausgetauscht werden, werden durch den CAN Bus übertra-
gen (z. B. Achsparameter, Zielposition, Endesignal,...). Dies bedeutet natürlich, dass die Anzahl
einzelner Telegramme wesentlich zunimmt verglichen mit der Menge an Daten der älteren Ma-
schinengeneration.
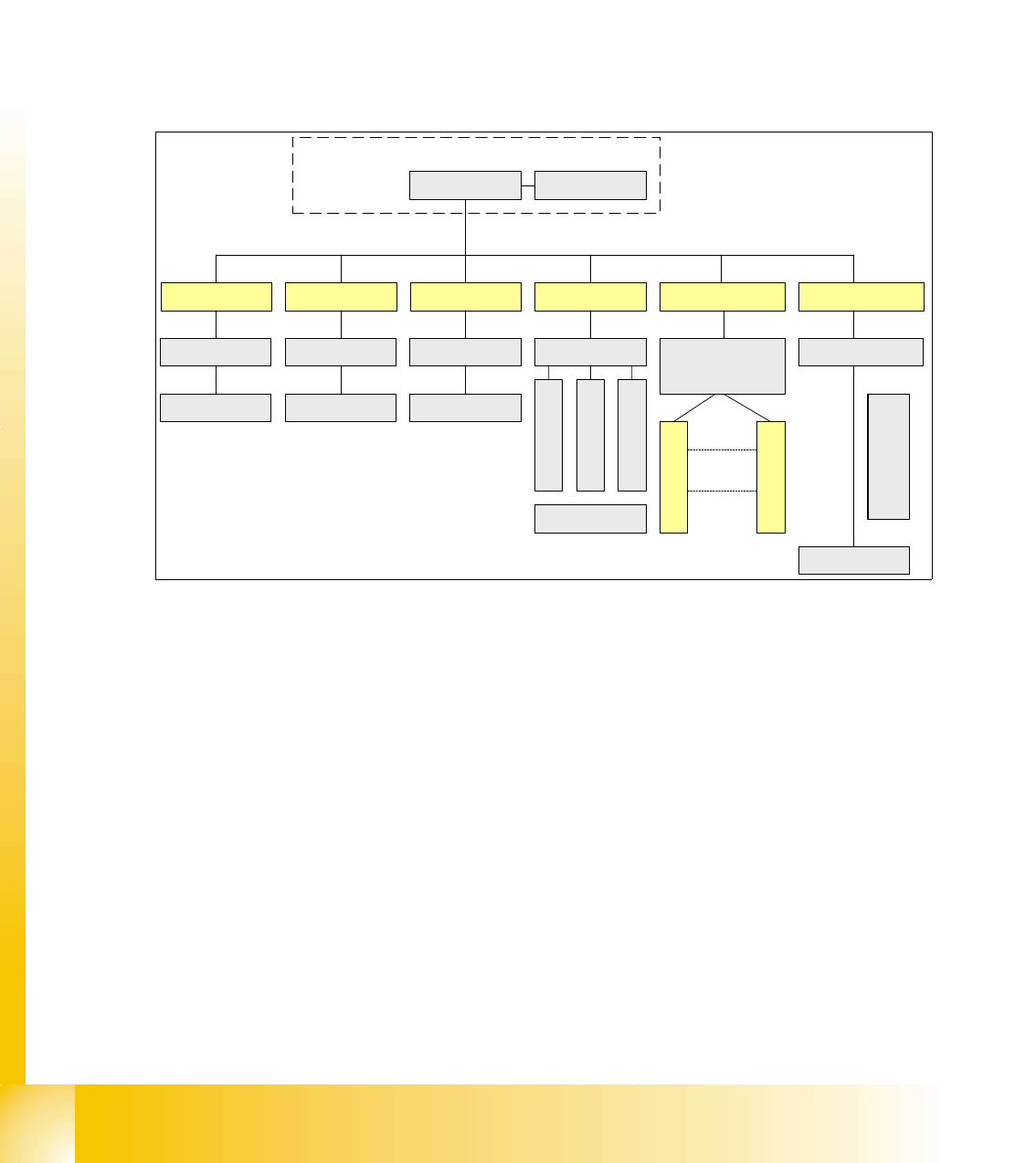
Abb. 2.2 - 12 Übersicht Achsansteuerung
Computer Unit
Achskarte A363
COM Board
Maschinen- CAN
Bus (1MBit/s)
X-Achse
Servokarte
DP - Antrieb 20
DP Antrieb 1
MC
Y-Achse Stern-Achse Z-Achse DP Antriebe (C&P20) DP Achse (C&P6/12)
Achskarte A363 Achskarte A363
Motherboard
DP Master
Servokarte Servokarte
Achskarte A363
Schrittmotorsteuerung
DP Einschwenken
Rückholeinheit
BE-Sensor
Z-unten Sensor
Achskarte A363
Servokarte
Servokarte
1 - 29
Student Guide CAN BUS Workshop
Ausgabe 06/2008 2 Kommunikation und Steuerung
29
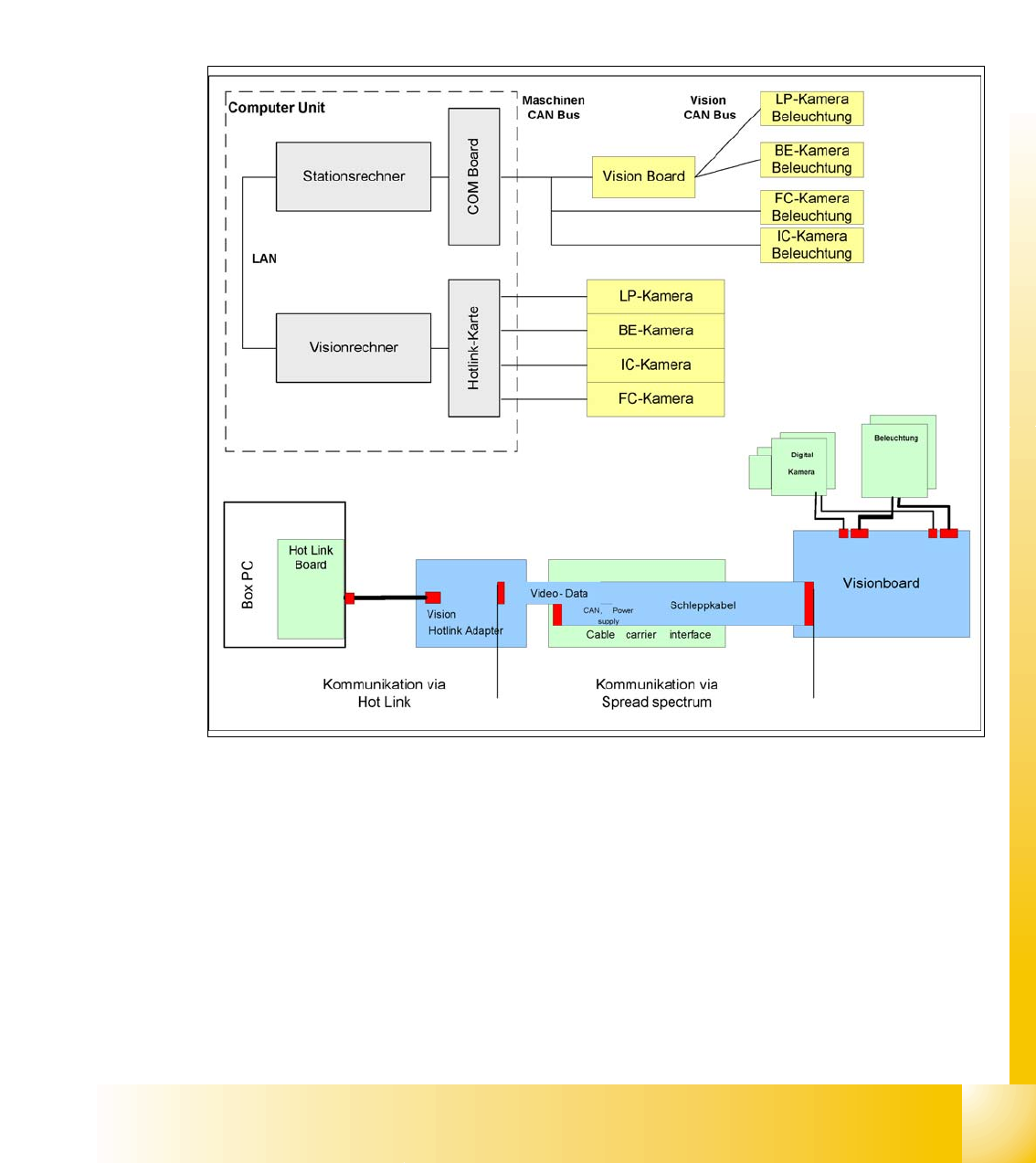
2.2.10 Kommunikation Siplace Vision
Die Kommunikation zwischen den einzelnen Rechnern erfolgt über LAN-Kabel, wobei der Stati-
onsrechner das Kommando zur Bildaufnahme an den Visionrechner sendet und das Resultat der
Messung empfängt. Weiterhin schickt der Stationsrechner die Beleuchtungswerte der entspre-
chenden Gehäuseformen. Die aufgenommenen Bilder werden digital über das Visionboard zum
Hotlink-Adapter via Spread-Spektrum übertragen und dann über die Hotlink-Verbindung zum Vi-
sionrechner geschickt und ausgewertet. Das Ergebnis wird zum Stationsrechner gesendet.
Abb. 2.2 - 13 Überblick Siplace Vision
1 - 30
Student Guide CAN BUS Workshop
2 Kommunikation und Steuerung Ausgabe 06/2008
30
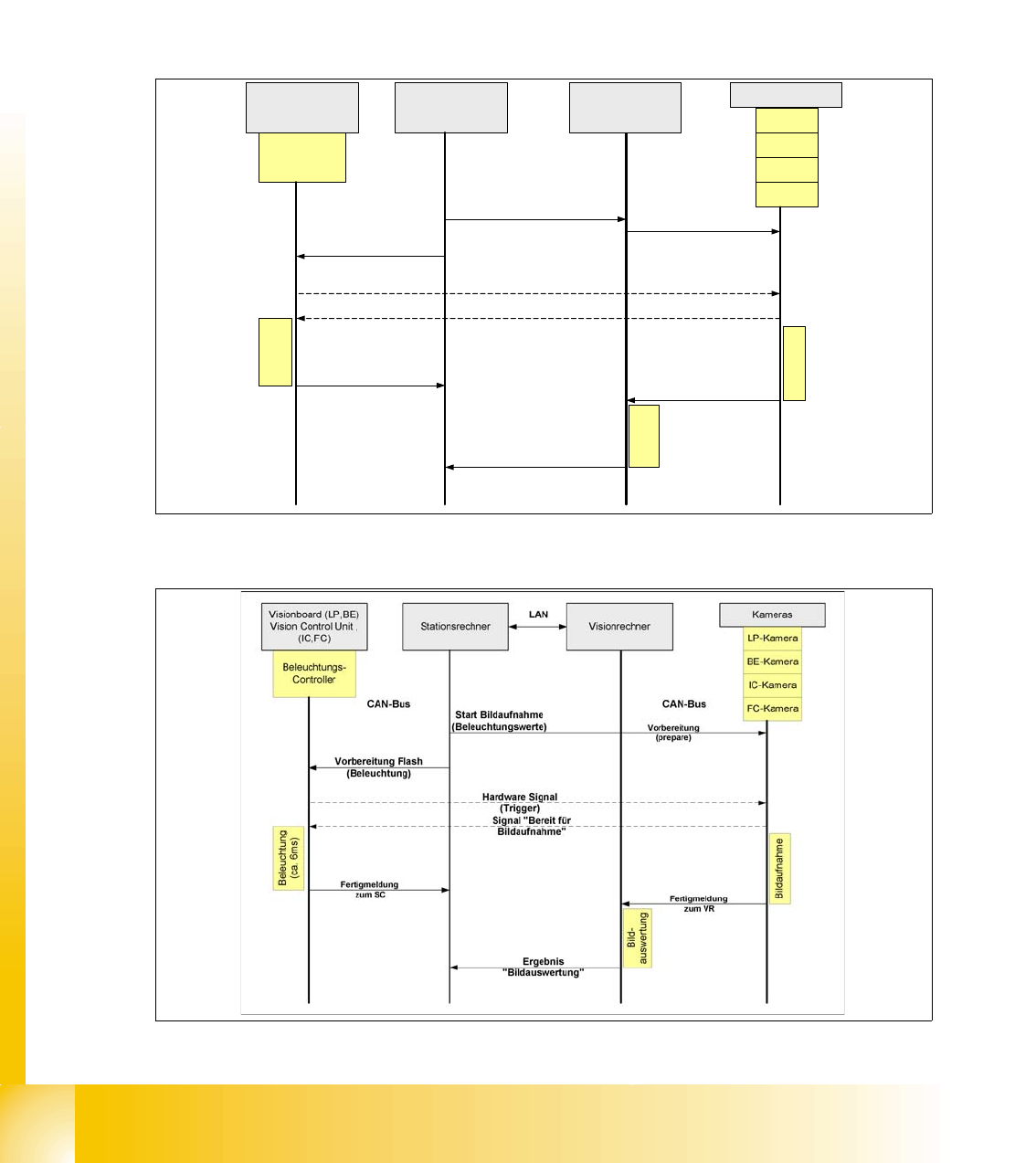
2.2.10.1 Kommunikation während einer Bildaufnahme
Die wichtigste Kommunikation zwischen dem Visionsystem und dem Maschinencontroller ist die
Übertragung der Beleuchtungswerte. Diese im GF gespeicherten Werte werden über den CAN-
Bus an die betreffende Kamera geschickt. Soll die Kamera das Bild aufnehmen, wird die Kamera
durch einen Trigger aktiviert. Ab diesem Moment leuchten die jeweiligen LED-Reihen der ver-
schiedenen Beleuchtungsstufen, abhängig vom Beleuchtungswert. Dieser kann die Werte 0 =
dunkel bis 255 =hell annehmen. Alle Beleuchtungsstufen beginnen im gleichen Augenblick zu
leuchten. Der Wert 0-255 bestimmt die Dauer der Beleuchtungszeit. Die maximale Dauer der Be-
leuchtung ist beschränkt auf 6 ms.
Abb. 2.2 - 14 Zeitlicher Ablauf von Oben nach Unten der Kommunikation Bildaufnahme mit SW60x
Abb. 2.2 - 15 Zeitlicher Ablauf von Oben nach Unten der Kommunikation Bildaufnahme mit SW70x
Kameras
Beleuchtungs-
Controller
Maschinen controller
(MC)
Stationsrechner
mit Visionsoftware
(Visiontask)
Vorbereitung
(prepare)
CAN Bus
Beleuchtung
(ca. 6ms)
LP-Kamera
FC-Kamera
IC-Kamera
BE-Kamera
Start Bildaufnahme
(Beleuchtungswerte)
Vorbereitung Flash
(Beleuchtung)
Hardware Signal
(Trigger)
Visionboard(LP,BE)
Vision Control unit ,
(IC,FC)
Fertigmeldung
zum MC
Signal "Bereit für
Bildaufnahme"
CAN Bus
Bild-
auswertung
Bildaufnahme
Fertigmeldung
zum VR
Ergebnis
"Bildauswertung"