CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第44页
1 - 18 S tudent Guide CAN BUS Wor kshop 2 Kommu nikation und S teuerung Ausg abe 06/2 008 18 2.2.7 CAN-Bu s Prozessorboard Das Can-Bu s Prozessor board TQM 167LC ist auf der Ko pfplatine C500 aufges teckt. Das P rozes- s…
1 - 17
Student Guide CAN BUS Workshop
Ausgabe 06/2008 2 Kommunikation und Steuerung
17
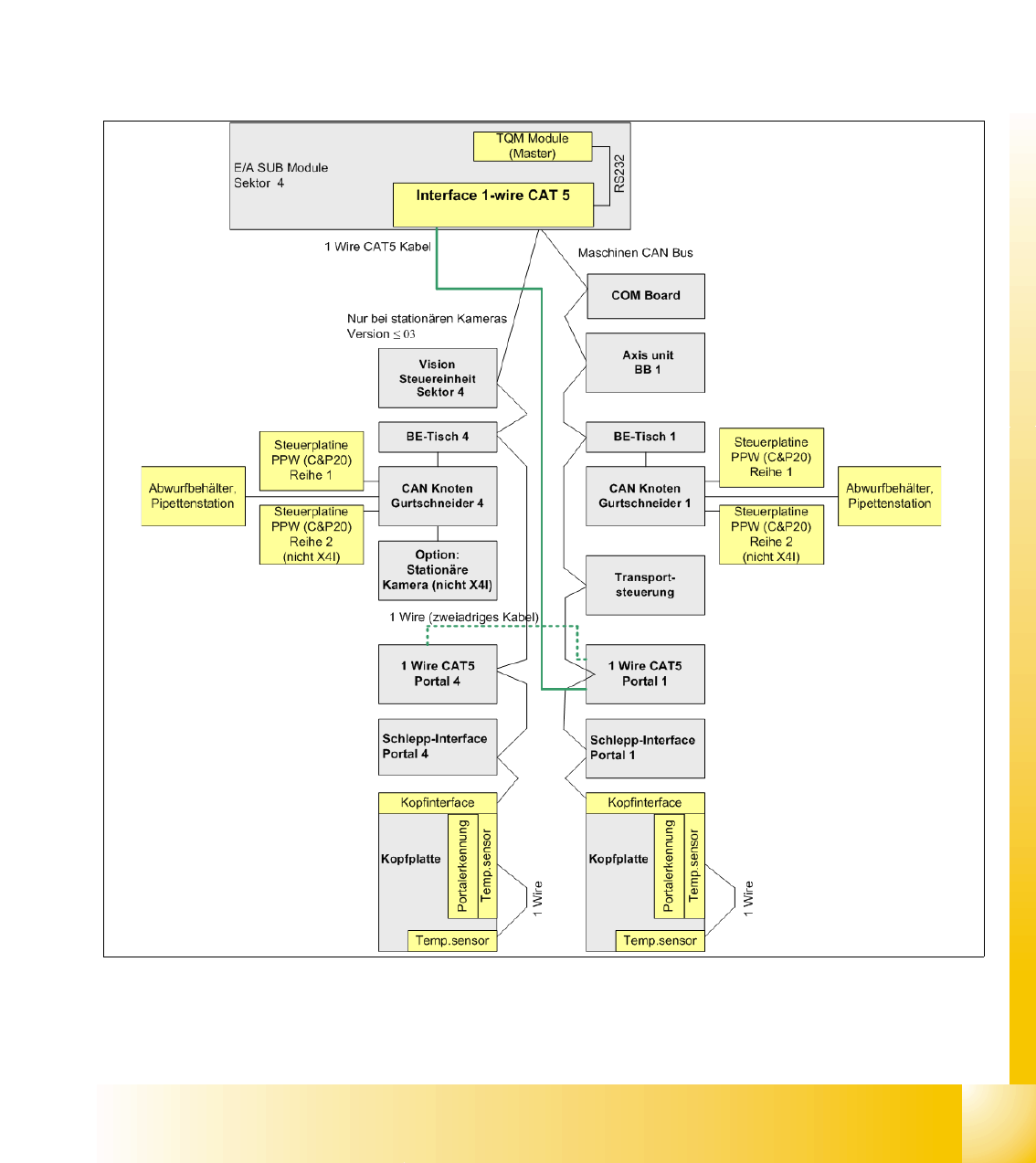
2.2.6.3 Siplace X3 mit CAT 5 Kabeln und CAN Knoten (Bsp.: BB1)
Bei den neueren SIPLACE X-Maschinen und der Siplace X4I wird der One-Wire-Bus nur noch für
die Temperatursensoren an der Kopfplatte eingesetzt. Das CAT5-Kabel für den One Wire Bus
wird direkt vom Main- bzw. Subdistributor bis zum Schleppinterface durch die Maschine geführt.
Mit der Einführung der Siplace X4I und der Weiterentwicklung der X-Serie wurden die Funktionen
Pipettenwechsler und Sensoren für die Abwurfbehälter in den Maschinen CAN Bus integriert.
D.h. Über das sogenannte "CAN node NC tape cutter module" [03052927-xx], welches an der
gleichen Stelle wie das Steuergerät für das Schneidgerät sitzt wird jetzt der Pipettenwechsler,
sensoren und das Schneidgerät gesteuert.
Abb. 2.2 - 7 Gesamtübersicht Maschinen-"One Wire Bus" mit CAN Knoten an einer Siplace X3

1 - 18
Student Guide CAN BUS Workshop
2 Kommunikation und Steuerung Ausgabe 06/2008
18
2.2.7 CAN-Bus Prozessorboard
Das Can-Bus Prozessorboard TQM 167LC ist auf der Kopfplatine C500 aufgesteckt. Das Prozes-
sorboard wird an verschiedenen Stellen in der Maschine eingesetzt. Befindet sich das Prozessor-
board auf der Kopfplatine, sorgt die Firmware auf dem Prozessorboard für die Steuerung der
kopfspezifischen Aktoren und Sensoren, egal welcher Kopftyp installiert ist.
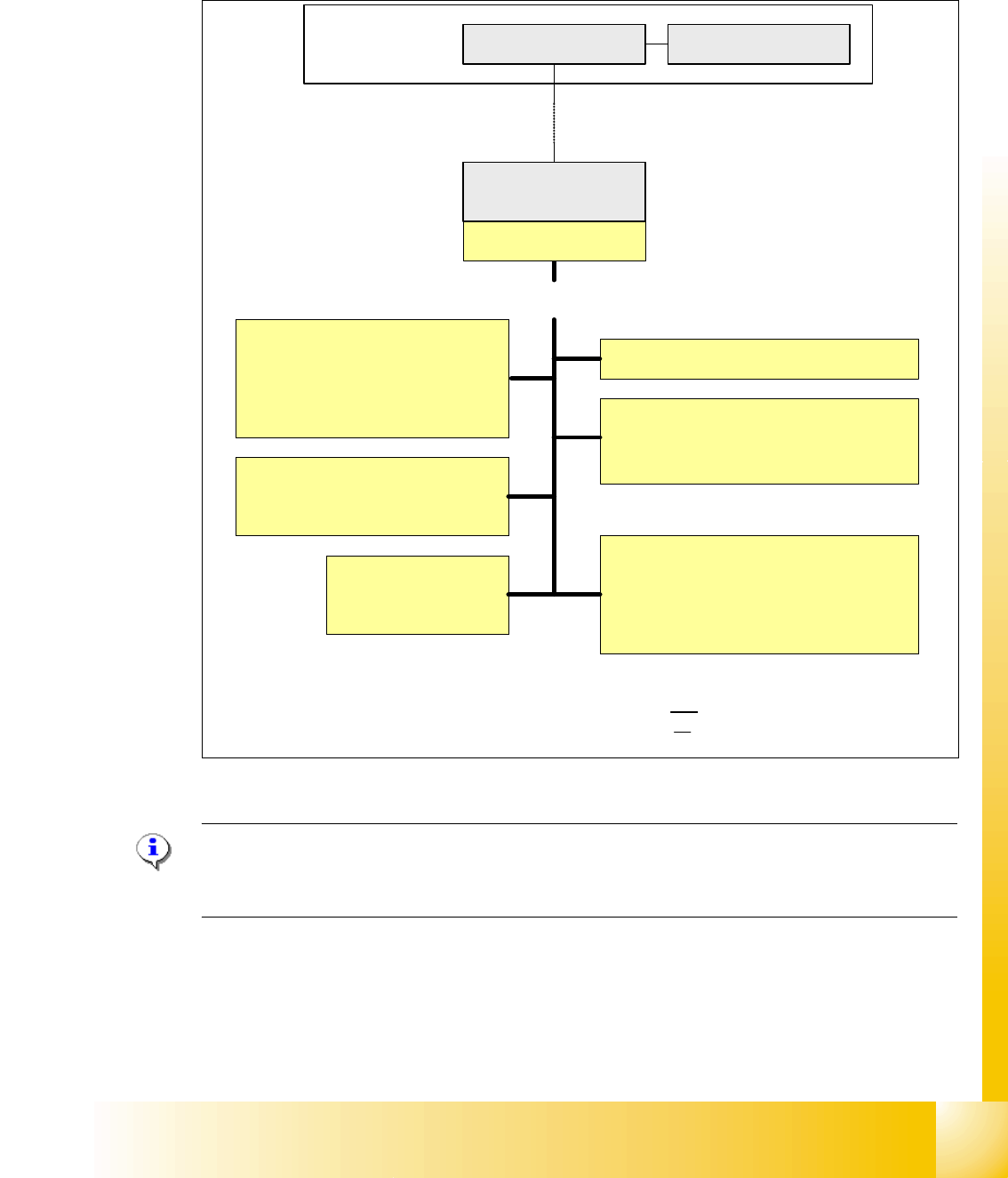
2.2.7.1 CAN-Bus gesteuerte Funktionen am 6/12C&P Kopf
Die folgende Übersicht zeigt verschiedene Kopffunktionen, die über das CAN-System gesteuert
werden. Der CAN-Bus steuert damit die Aktoren und Sensoren des C&P Kopfes.
Abb. 2.2 - 8 CAN Bus gesteuerte Funktion am C&P Kopf
Hinweis:
Über die 7-Segment-Anzeige wird der Status des 16 Bit PROZESSORBOARDS angezeigt.
Normaler Betriebszustand: " . " blinkt. (Beschreibung siehe Kapitel C&P Kopf). 2
BE-Sensor
CAN Bus 16 Bit Prozessorboard
SM Abwurf
:
LS oben
LS unten Magnetventil
Balsluft
:
CAN bus
SM
einschwenkden
Dp-Station
SM Abholen /
Bestücken
Vakuumwerte
Kommunikationsboard
LS = Lichtschranke
SM = Schrittmotor
BE-Sensor = Bauelemente Sensor
1 - 19
Student Guide CAN BUS Workshop
Ausgabe 06/2008 2 Kommunikation und Steuerung
19
2.2.7.2 CAN-Bus gesteuerte Funktionen am C&P 20 Kopf
Die folgende Übersicht zeigt verschiedene Kopffunktionen, die über das CAN-System gesteuert
werden. Der CAN-Bus steuert damit die Aktoren und Sensoren des C&P Kopfes.
Abb. 2.2 - 9 Kommunikation TQM Modul am C&P 20 Kopf
Hinweis:
Über die 7-Segment-Anzeige wird der Status des 16 Bit PROZESSORBOARDS angezeigt.
Normaler Betriebszustand: " . " blinkt. (Beschreibung siehe Kapitel C&P Kopf). 2
Abhol/Bestückposition
1. Einstellen Vakuum/Blasluft
2. Messen Vakuum/Blasluft
3. Abwerfen
Haltekreis
1. Überwachung Vakuum
2. Messen Vakuum
BE-Sensors
1. Initialisierung
2. Kalibrierung
EEPROM
1. NPK Z-Achse
2. NPK Stern-Achse
3. weitere kopfspezifische Daten
Computer Unit
COM Board
Maschinen- CAN
Bus (1MBit/s)
Steuerung der folgenden Funktionen
MC
Kopfprozessor
C500
TQM-Modul
Lichtschranke unten
1. Aktivierung der LS unten
Auswertung LS unten erfolgt direkt
auf der A363
Steuerung Kopf-Can Bus
Auswertung BE-Sensor erfolgt
direkt auf der A363
NPK = Nullpunktkorrektur
TQM = TQ Firmenname
M Modul
TQM = 16 Bit Prozessor