CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第53页
1 - 27 S tudent Guid e CAN BU S Wor kshop Ausgabe 0 6/2008 2 Komm unikation un d S teuerung 27 X8_5 Do12 X8_6 Do13 X8_7 Do14 X8_8 Do15 X9_1 24 V X9_2 24 V X9_3 24 V X9_4 24 V X9_5 GND X9_6 GND X9_7 GND X9_8 GND Klemmen- …
1 - 26
Student Guide CAN BUS Workshop
2 Kommunikation und Steuerung Ausgabe 06/2008
26
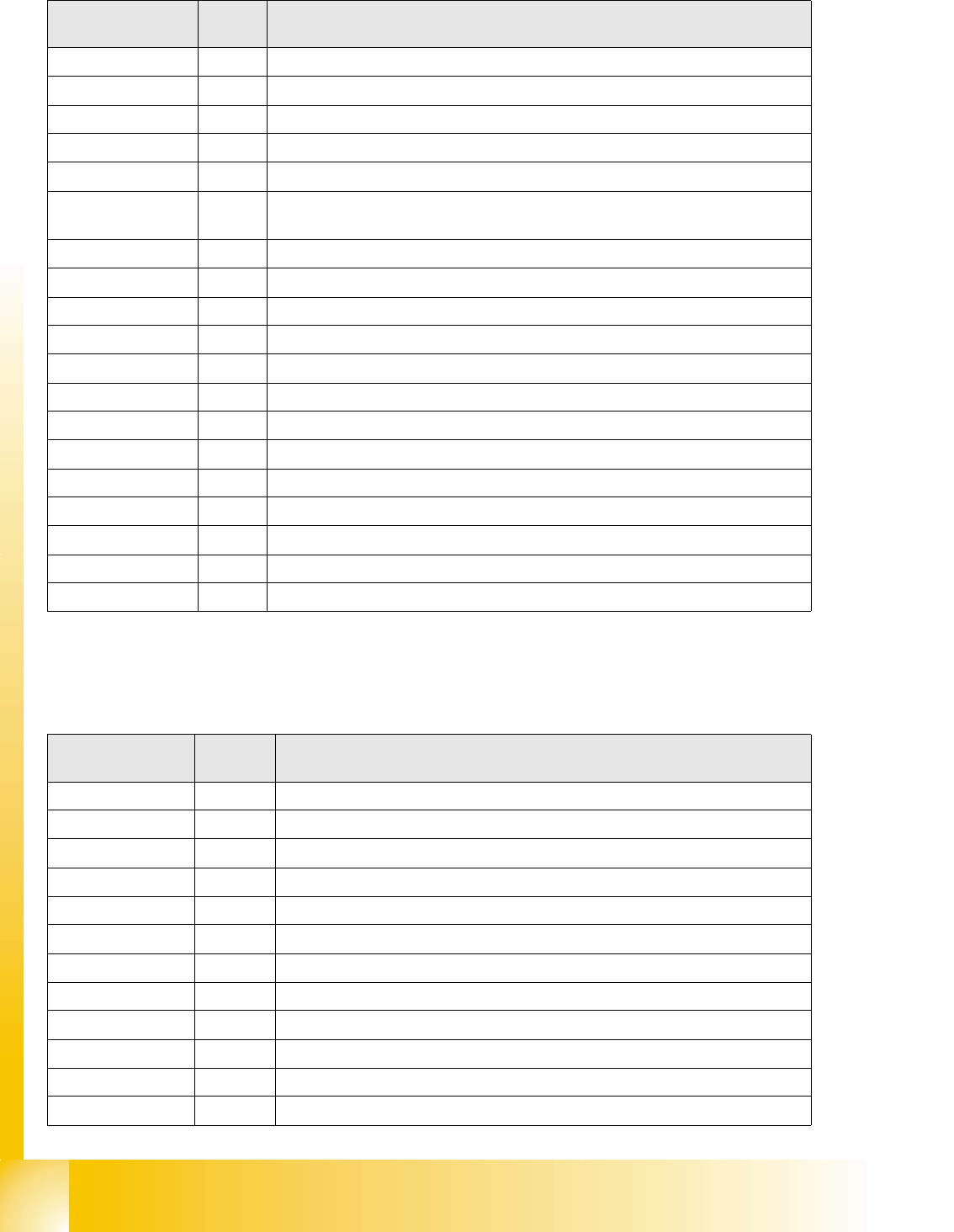
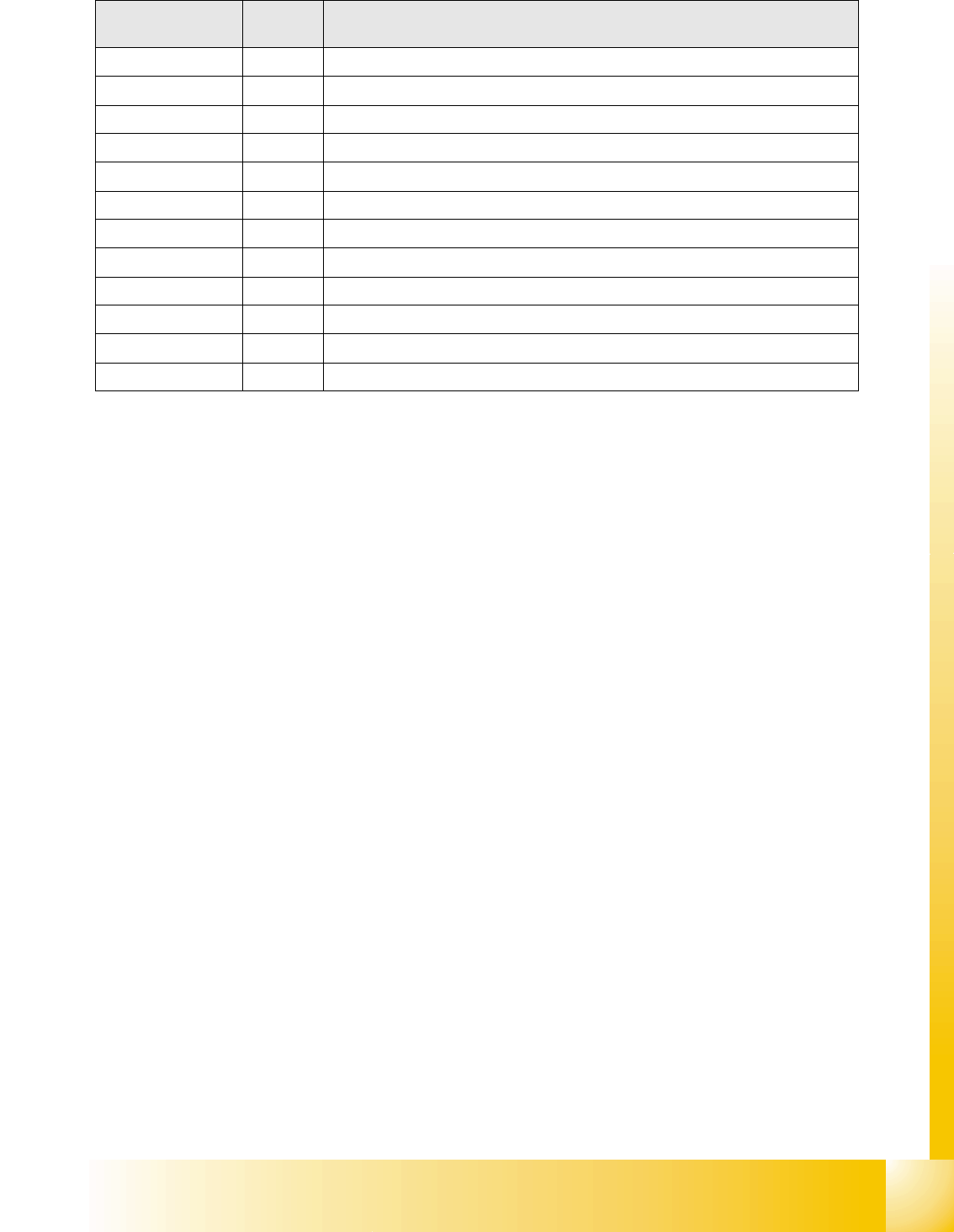
2.2.8.5 E/A-Modul Sub Distributor (Ausgänge)
nc = not connected (Reserve)
X4_7 Di14 nc
X4_8 Di15 M_NotAusTasteMTC/
"high" Signal NOT-HALT betätigt.
X5_1 Di16 nc
X5_2 Di17 M_Haube1
"high" Signal wenn Haube1 geschlossen
X5_3 Di18 M_BE-Tisch1
"high" Signal wenn BE-Tisch 1 angedockt
X5_4 Di19 M_HaubeLP-Eingabe "high" Signal wenn die Abdeckung über der LP-Eingabe
geschlossen ist.
X5_5 Di20 M_NotAusTasteLP-Eingabe
"high" Signal wenn NOT-HALT-Taste entriegelt ist.
X5_6 Di21 M_Haube4
"high" Signal wenn Haube 4 geschlossen.
X5_7 Di22 M_BE-Tisch4 "high" Signal wenn BE-Tisch 4 angedockt
X5_8 Di23 nc
X5_8 Di23 nc
X6_1 nc
X6_2 nc
X6_3 GND
X6_4 nc
X6_5 nc
X6_6 nc
X6_7 nc
X6_8 nc
Klemmen-
bezeichnung
I/O Beschreibung/ Kommentar
Klemmen-
bezeichnung
I/O Beschreibung/ Kommentar
X7_1 Do0 nc
X7_2 Do1 nc
X7_3 Do2 nc
X7_4 Do3 nc
X7_5 Do4 nc
X7_6 Do5 St_Vakuumpumpe EIN
X7_7 Do6 nc
X7_8 Do7 nc
X8_1 Do8 nc
X8_2 Do9 nc
X8_3 Do10 nc
X8_4 Do11 nc
1 - 27
Student Guide CAN BUS Workshop
Ausgabe 06/2008 2 Kommunikation und Steuerung
27
X8_5 Do12
X8_6 Do13
X8_7 Do14
X8_8 Do15
X9_1 24 V
X9_2 24 V
X9_3 24 V
X9_4 24 V
X9_5 GND
X9_6 GND
X9_7 GND
X9_8 GND
Klemmen-
bezeichnung
I/O Beschreibung/ Kommentar
1 - 28
Student Guide CAN BUS Workshop
2 Kommunikation und Steuerung Ausgabe 06/2008
28
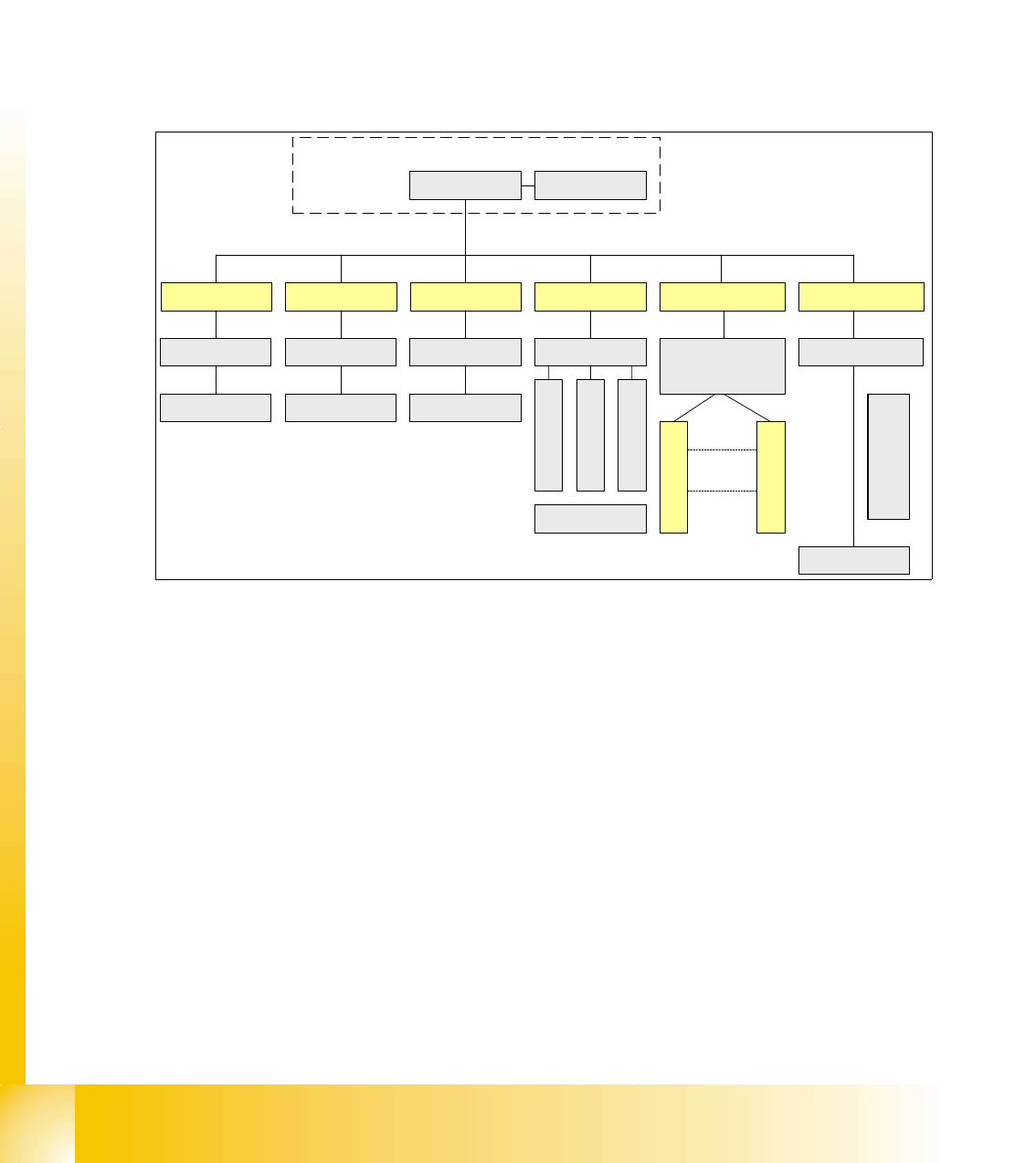
2.2.9 CAN-Bus Kommunikation mit der Achsansteuerung
In früheren SIPLACE-Maschinen erfolgte die Kommunikation und der Datenfluss zwischen Achs-
und Maschinensteuerung mittels SMP-Bus. Ab der HF-Generation wird der SMP-Bus nicht mehr
mit dem Achssystem verwendet.
Die Kommunikation zwischen den Achssteuerungen erfolgt jetzt über den CAN-Bus. Alle Informa-
tionen, die zwischen diesen Modulen ausgetauscht werden, werden durch den CAN Bus übertra-
gen (z. B. Achsparameter, Zielposition, Endesignal,...). Dies bedeutet natürlich, dass die Anzahl
einzelner Telegramme wesentlich zunimmt verglichen mit der Menge an Daten der älteren Ma-
schinengeneration.
Abb. 2.2 - 12 Übersicht Achsansteuerung
Computer Unit
Achskarte A363
COM Board
Maschinen- CAN
Bus (1MBit/s)
X-Achse
Servokarte
DP - Antrieb 20
DP Antrieb 1
MC
Y-Achse Stern-Achse Z-Achse DP Antriebe (C&P20) DP Achse (C&P6/12)
Achskarte A363 Achskarte A363
Motherboard
DP Master
Servokarte Servokarte
Achskarte A363
Schrittmotorsteuerung
DP Einschwenken
Rückholeinheit
BE-Sensor
Z-unten Sensor
Achskarte A363
Servokarte
Servokarte