CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第80页
1 - 18 S tudent Guide CAN BUS Wor kshop 3 CAN BUS Ausga be 06/ 2008 18 31 Da tum06/2 00 8 Ve rsion 03 CAN Bus W or kshop M at hi a s Michel SIPL ACE Cam p us Automati on and Drives 4. Ü berbl ick C AN Bus S tru ktur Si p…
1 - 17
Student Guide CAN BUS Workshop
Ausgabe 06/2008 3 CAN BUS
17
29Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
3. COM Baugruppe:
Fehlermeldung CAN Card MC (COM 168)
FM_CAN_FIRMWARE_VERSION Æ 3524 Falsche CAN Firmware-Version (Info 1: Firmware-
Version / Info 2: Release-Nr.)
Abfrage der Softwareversion an der CAN COM 168 Siplace X:
• Achtung: Alle CAN Bus Stecker an der COM Baugruppe abziehen und Maschine einschalten!
• Auf MC umschalten
• Konsole F4 wechseln
• Zu Laufwerk D: wechseln (cd d:)
• In das Verzeichnis fw_dl wechseln (cd fw_dl)
• Eingabe zur Versionsabfrage D:\FW_DL >ver_c168
Download der Softwareversion an der CAN COM 168 Siplace X:
• Eingabe zum Start des Downloads (pcidown.386 FW113.HEX) (Neuste Datei suchen unter sc d:
FW_DL unter read me .txt)
• Info: Zu Beginn des Downloads wir die aktuelle Version angezeigt
• Wenn Download erfolgreich war (dauert wenige Sekunden) wird die neue Version automatisch
angezeigt.
• Maschine neu starten!
3. Mögliche Fehlerquellen
CAN BUS Siplace
30Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
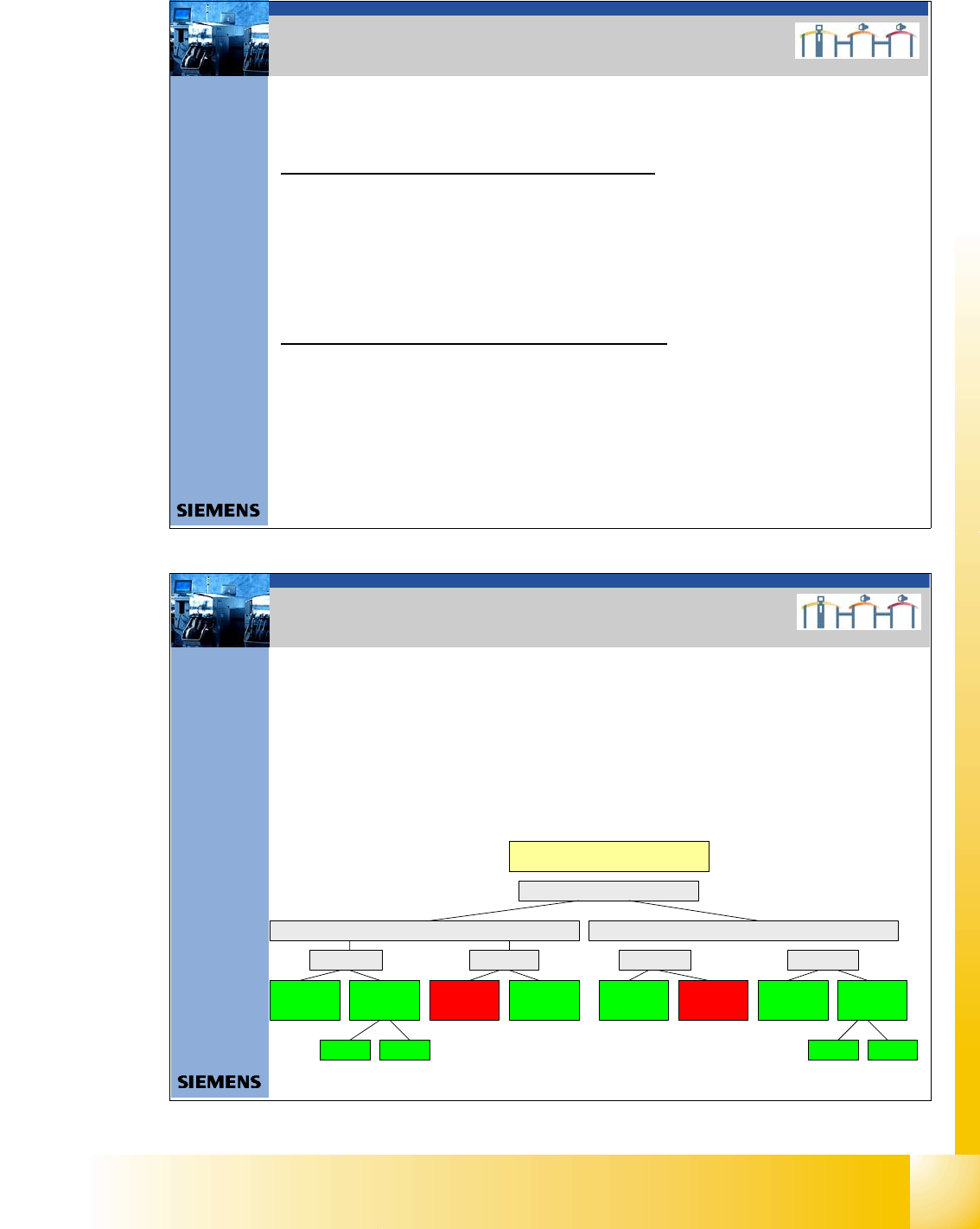
4. Überblick CAN Bus Struktur Siplace HF
CAN Bus Strukturen
HF
UniversalkabelbaumAlter Kabelbaum
COM KSP354COM KSP 352
SW 504
Ein CAN Bus pro
Maschine
SW 505
Ein CAN Bus pro
Bestückbereich
Version 01 Version 02
SW 504
Ein CAN Bus pro
Maschine
(gab es nicht!)
SW 505
Ein CAN Bus pro
Bestückbereich
COM KSP354COM KSP 352
SW 504
Ein CAN Bus pro
Maschine
SW 505
Ein CAN Bus pro
Bestückbereich
(gab es nicht!)
SW 505
Ein CAN Bus pro
Bestückbereich
SW 504
Ein CAN Bus pr o
Maschine
Version 01 Version 02
Grundsätzlich muss mit folgenden Unterschieden bei den gelieferten HF Maschinen gerechnet
werden:
1. Kommunikationsbaugruppen 2x KSP 352 bzw. eine KSP 354
2. HF Maschinen mit einem CAN BUS für beide Bestückbereiche, wird nur unterstützt mit der
Stationssoftware 504.xx
3. HF Maschinen ab der Stationsoftware 505.xx unterstützen nur die CAN Bus struktur mit einem CAN
Bus pro Bestückbereich.
4. Bei den Kabelbäumen wird zwischen altem Kabelbaum und dem Universalkabelbaum (neu)
unterschieden.
CAN BUS Siplace
1 - 18
Student Guide CAN BUS Workshop
3 CAN BUS Ausgabe 06/2008
18
31Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
4. Überblick CAN Bus Struktur Siplace HF/3
HF/3
COM KSP 352 COM KSP354
Universalkabelbaum
Version 02Version 01
CAN BUS Siplace
32Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
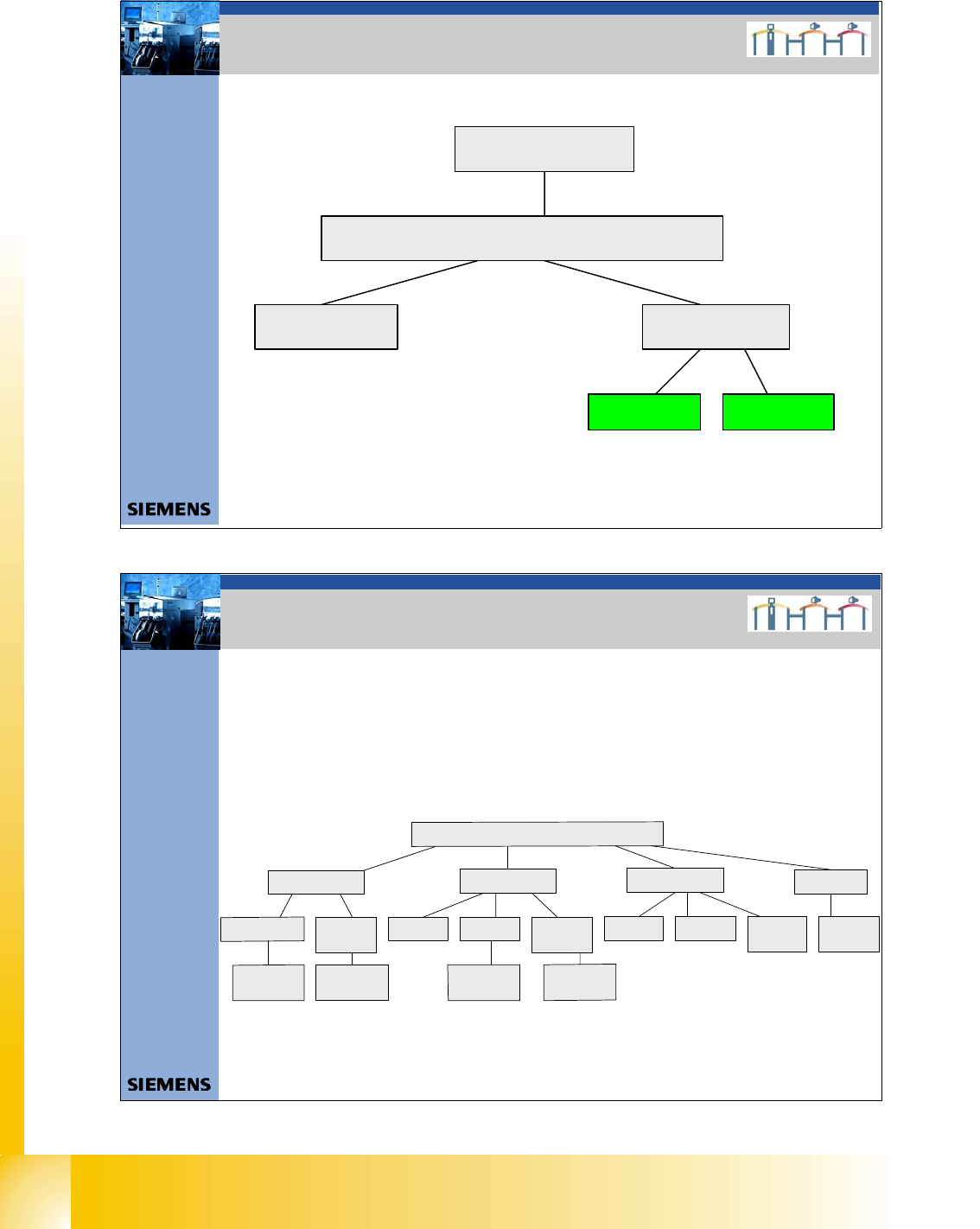
4. Überblick CAN Bus Struktur Siplace X
Mit den neuen stationären Kameras, ist die Vision control unit (VCU) implementiert. Dadurch können die
VCU`s aus den Sektoren entfallen. Dadurch wird an den Stellplätzen ein zusätzlichen CAN Bus Anschluß
benötigt. Damit ergeben sich je Maschinentyp und Kopfkonfiguration unterschiedliche CAN Bus Strukturen
an den Stellplätzen (Stellplätze 1, 2, 3 oder 4).
Mit der SW 605 ist es möglich einen WPC 4 an den Maschinen X 2 (Stellplatz 2 und 4) und X3 (Stellplatz 3)
zu installieren. Der WPC wird dann über einen Sub CAN Bus gesteuert. Dazu wird die Platine Interface 1-
Wire CAT5 gegen die Platine Interface 1-Wire CAN2 mit einem zusätzlichen CAN Bus Anschluß getausch.
X
-
S
e
r
i
e
X
2
X
3
X
4
V
a
r
i
a
n
t
e
1
V
a
r
i
a
n
t
e
2
V
a
r
i
a
n
t
e
1
V
a
r
i
a
n
t
e
2
N
u
r
V
a
r
i
a
n
t
e
2
V
a
r
i
a
n
t
e
3
m
i
t
C
A
N
K
n
o
t
e
n
V
a
r
i
a
n
t
e
3
u
n
d
W
P
C
4
V
a
r
i
a
n
t
e
3
u
n
d
W
P
C
4
X
4
I
V
a
r
i
a
n
t
e
3
m
i
t
C
A
N
K
n
o
t
e
n
V
a
r
i
a
n
t
e
3
m
i
t
C
A
N
K
n
o
t
e
n
V
a
r
i
a
n
t
e
3
m
i
t
C
A
N
K
n
o
t
e
n
V
a
r
i
a
n
t
e
2
u
n
d
W
P
C
4
V
a
r
i
a
n
t
e
2
u
n
d
W
P
C
4
CAN BUS Siplace
1 - 19
Student Guide CAN BUS Workshop
Ausgabe 06/2008 3 CAN BUS
19
33Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
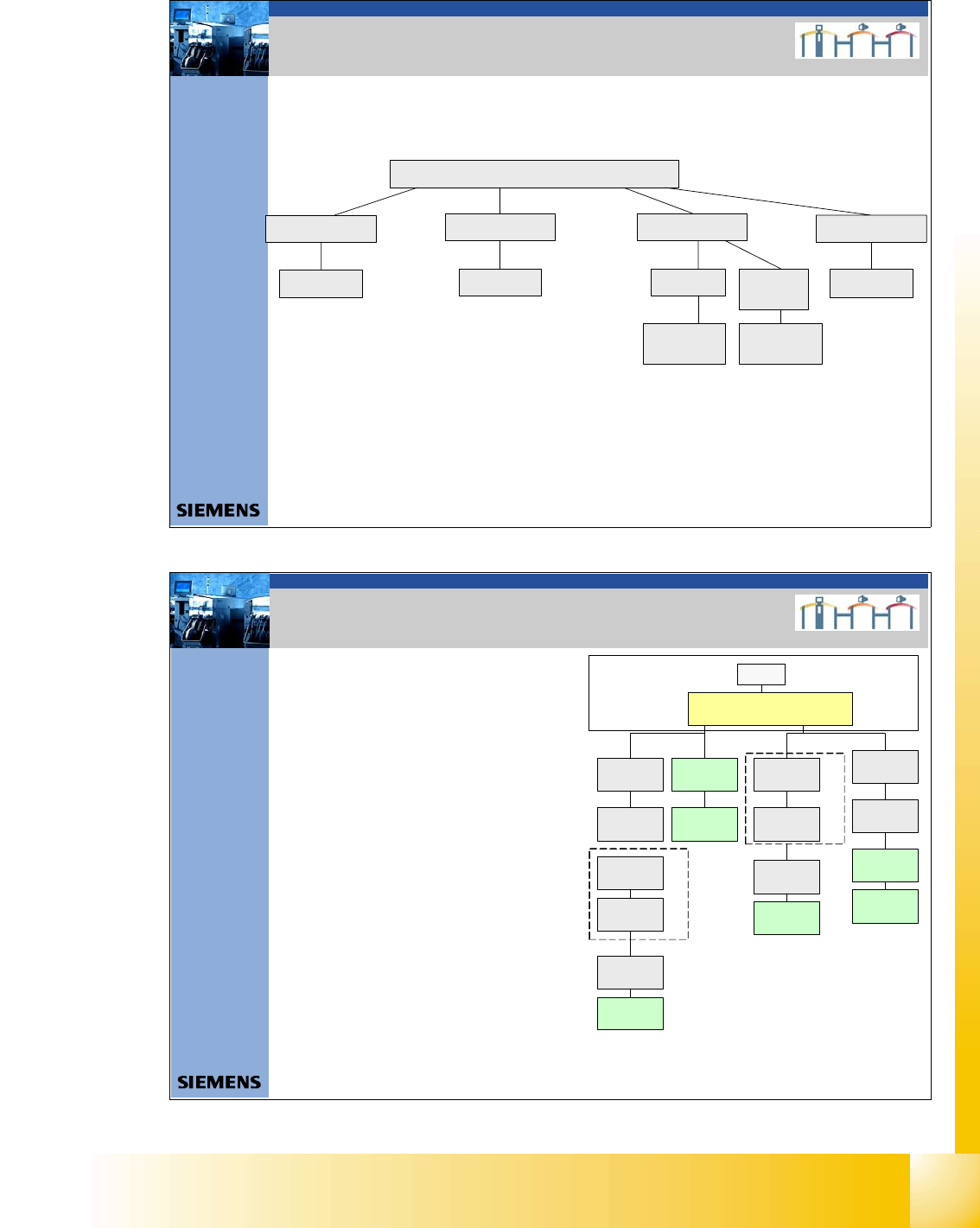
4. Überblick CAN Bus Struktur Siplace D-Serie
D- serie
D 1
D 2 D3 (X3)
Variante 1 Variante 1
D 4
Variante 1
Variante 2
Variante 3 und
WPC 4
Variante 3
mit CAN
Knoten
Va riante 2
und WPC 4
CAN BUS Siplace
34Datum06/2008 Version 03 CAN Bus W orkshop Mathias Michel
SIPLACE Campus
Automation and Drives
4. CAN Bus Struktur Siplace HF aktuell
SMP BUS
C
O
M
U
n
i
t
K
S
P
3
5
4
MC
CAN Bus cable 2
Computer Unit
For each Placementarea one CAN Bus!
* with SW 505 Gantry 2 is changed to gantry 3
new cable loop!
new circuit diagram!
Trailing cable-
Interface
Gantry 1
Transport
COT 1
Tape cutter
Control unit
CAN Bus cable 1
CAN E/
AModu
l
Sektor
4
CAN E/
A
Modu
l
Sektor
4
CAN E/
AModu
l
Sektor
4
CAN I/O
SUB Module
Section 4
Vision
Control unit
SUB Distributor Section 4
Section 4
COT 4 / MT C
Tape cutter
Vision
Section 2
CAN I/O
Main Module
Section 2
Main Distributor Section 2
Control unit
COT 2 / MTC
Tape cutter
Axis unit
PA 2
COT 3
Tape cutter
Trailing cable-
Interface
Gantry 3*
x6pnx11pn
Head board(C5 00)
Gantry 1
Terminator
(120 OHM)
Head board(C500)
Gantry 3*
Te rm inator
(120 OHM)
Terminator (120 OHM)
[near the trailingcab le
in ter fac e ]
Terminator (120 OHM)
[near the trailingcable
in ter fac e ]
- CAN Bus Struktur mit SW 505.xx
- Com Baugruppe KSP 354
- Universalkabelbaum
(Beschriftung am Kabel (0301xxxx-0x)
- ein CAN Bus für jeden Bestückbereich.
CAN BUS Siplace