CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第66页
1 - 4 S tudent Guide CAN BUS Wor kshop 3 CAN BUS Ausga be 06/ 2008 4 3 D at u m 06 /2 0 08 Ver s i o n 0 3 CA N Bu s W o rk sh op Mat hia s Mi c he l SIPL ACE Ca mp us Aut o matio n and D rive s 1. CAN BU S Sip lac e V o…
1 - 3
Student Guide CAN BUS Workshop
Ausgabe 06/2008 3 CAN BUS
3
3 CAN BUS
Logistics & Assembly Systems
Siplace CAN BUS Workshop
2Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
Inhalt
1. Can Bus Voraussetzungen
2. Allgemeines zum CAN Bus
3. Überprüfung des CAN Bus
4. CAN Bus Strukturen Siplace HF, X-Serie und D-Serie
5. One Wire Bus
6. LP Kennung
CAN Bus Workshop
1 - 4
Student Guide CAN BUS Workshop
3 CAN BUS Ausgabe 06/2008
4
3Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
1. CAN BUS Siplace
Voraussetzungen
Multimeter, Oszilloskop
CAN Testbox 03043645-01
Service Laptop with the SW Caccia
00349514-01 Kvaser Card for Laptop
00349679-03 Testcable for CAN Bus 2x
00349676-01 CAN Cable (Receiver) 2x
00194932-11 Anleitung CAN Test Box
CAN BUS Siplace
4Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
2. CAN BUS (allgemein)
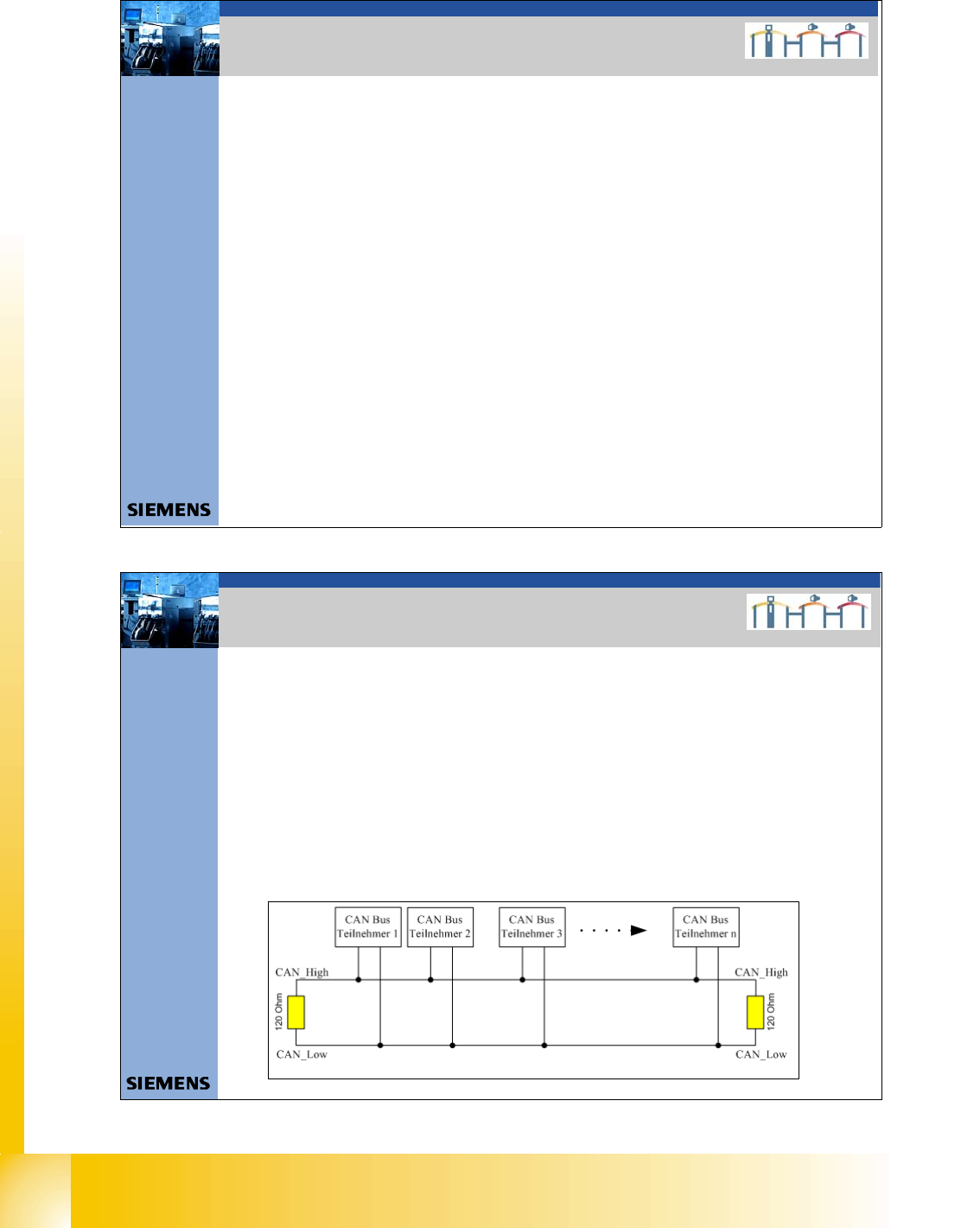
Der CAN Bus ist ein dezentraler, serieller Multi-Master Bus. Jeder Busteilnehmer darf senden, wenn
der Bus frei ist.
Broadcast, d.h. die Nachricht enthält keine Zieladresse, sondern nur einen Identifier. Alle Teilnehmer
empfangen diese Nachricht und entscheiden selber, ob sie auf die Nachricht reagieren.
Ein CAN Teilnehmer (CAN Knoten) besteht aus einem CAN Controller mit Sender- und Empfänger
einheit und einem Mikrocontroller.
Über die Differenzspannung der zwei Leitungen CAN_High und CAN_Low, welche jeweils mit einem
Abschlusswiderstand von 120 Ohm versehen sind, werden die Daten übertragen
CAN BUS Siplace
1 - 5
Student Guide CAN BUS Workshop
Ausgabe 06/2008 3 CAN BUS
5
5Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
2. CAN BUS (allgemein)
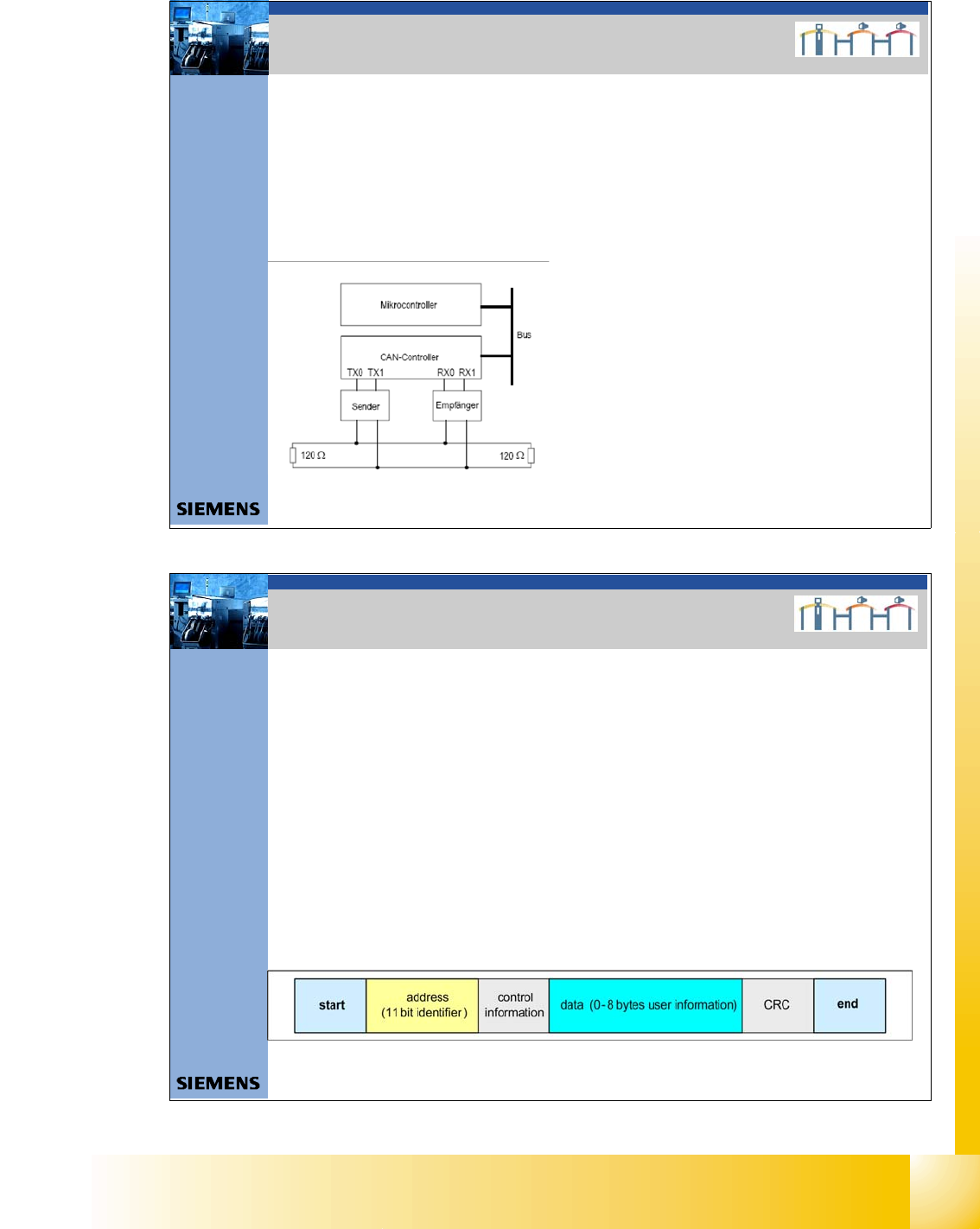
Jeder Busteilnehmer besitzt einen CAN-Controller, welcher Daten senden und empfangen kann,
wenn der Bus frei ist.
Dieser CAN-Controller kommuniziert mit einem Mikrocontroller. Der Mikrocontroller steuert und
kontrolliert den entsprechenden CAN-Bus-Teilnehmer.
Ein CAN-Bus-Teilnehmer kann nur senden, wenn der Bus frei ist, d. h. keine Kommunikation zu
anderen Teilnehmern stattfindet. Der Zugriff auf den CAN-BUS wird im CAN-Protokoll (Identifier)
festgelegt. Damit ergeben sich unterschiedliche Prioritäten der CAN-Bus-Teilnehmer.
Mikrocontroller: Tauscht mit dem CAN Controller Daten aus
CAN Controller: Fügt den Datenrahmen hinzu,
baut die Verbindung auf,
macht die Fehlerbehandlung.
Sender/Empfänger: Pegelanpassung (Treiberstufen)
CAN BUS Siplace
6Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
2. CAN Bus (allgemein)
CAN-Telegramm :
• Ein Telegramm kann zwischen 0..8 Datenbytes enthalten.
• Ein 11 Bit langer Identifier (Adresse) identifiziert die Nachricht bzgl. Art, Priorität, Quelle
und /oder Ziel.
• Durch den Identifier wird auch der Buszugriff gesteuert (Arbitrierung).
• Der Identifier bestimmt die Priorität auf den Buszugriff (Arbitrierung) und entscheidet bei
gleichzeitigem Buszugriff mehrerer Teinehmer welche Nachricht zuerst und welche später
gesendet wird.
• Der CAN Bus arbeitet mit einem 11bit Identifier (Machine CAN BUS) oder einem
erweitertem Identifier von 29 bit (Sub CAN Bus e.g. CAN node).
CAN BUS Siplace