CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第74页
1 - 12 S tudent Guide CAN BUS Wor kshop 3 CAN BUS Ausga be 06/ 2008 12 19 D at um 06 /20 08 Ver s io n 0 3 C AN Bu s W o rksh o p M at hias M ichel SIPL ACE Ca mp u s Automati on and Drives 3. M es sung der Spannungspege…
1 - 11
Student Guide CAN BUS Workshop
Ausgabe 06/2008 3 CAN BUS
11
17Datum06/2008 Version 03 CAN Bus W orkshop Mathias Michel
SIPLACE Campus
Automation and Drives
3. Auswirkung falscher Abschlusswiderstände
Abschlusswiderstände 40 Ohm
CAN High - Pegel < 1,5 V
CAN Low –Pegel < 1,5 V
CAN BUS Siplace
18Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
2. Überprüfung der Signale Power fail, CAN init, -reset
Im CAN Bus Kabel werden zusätzliche Signale für CAN Init und CAN Reset geführt. Diese
zwei Signale werden nicht benutzt, Ausnahme das CAN Reset Signal an der HS50, haben
aber eine Spannung von 5V.
Da aber im Fehlerfall. z.B. defektes Kabel, diese 5V einen Kurzschluß zum CAN Bus
verursachen können, müssen diese Signale überprüft werden. -> 5V (min.4,0V)
Das Power Fail Signal wird von der Software ausgewertet und hat einen Spannungslevel von
5V.
Hinweis:
In einigen Siplace Maschinen sind die Adern für die Signale CAN init, CAN reset und Power
fail am Servicestecker (COM Karte) nicht kontaktiert.
In diesem Fall kann man sehr einfach an der Platine auf dem E/A Module (Interface 1-Wire
CAT5) die Spannungen dieser Signale überprüfen.
3. Überprüfung der Spannungen
(CAN init,-reset,Power fail)
CAN BUS Siplace
1 - 12
Student Guide CAN BUS Workshop
3 CAN BUS Ausgabe 06/2008
12
19Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
3. Messung der Spannungspegel
3. Überprüfung des recessiven levels
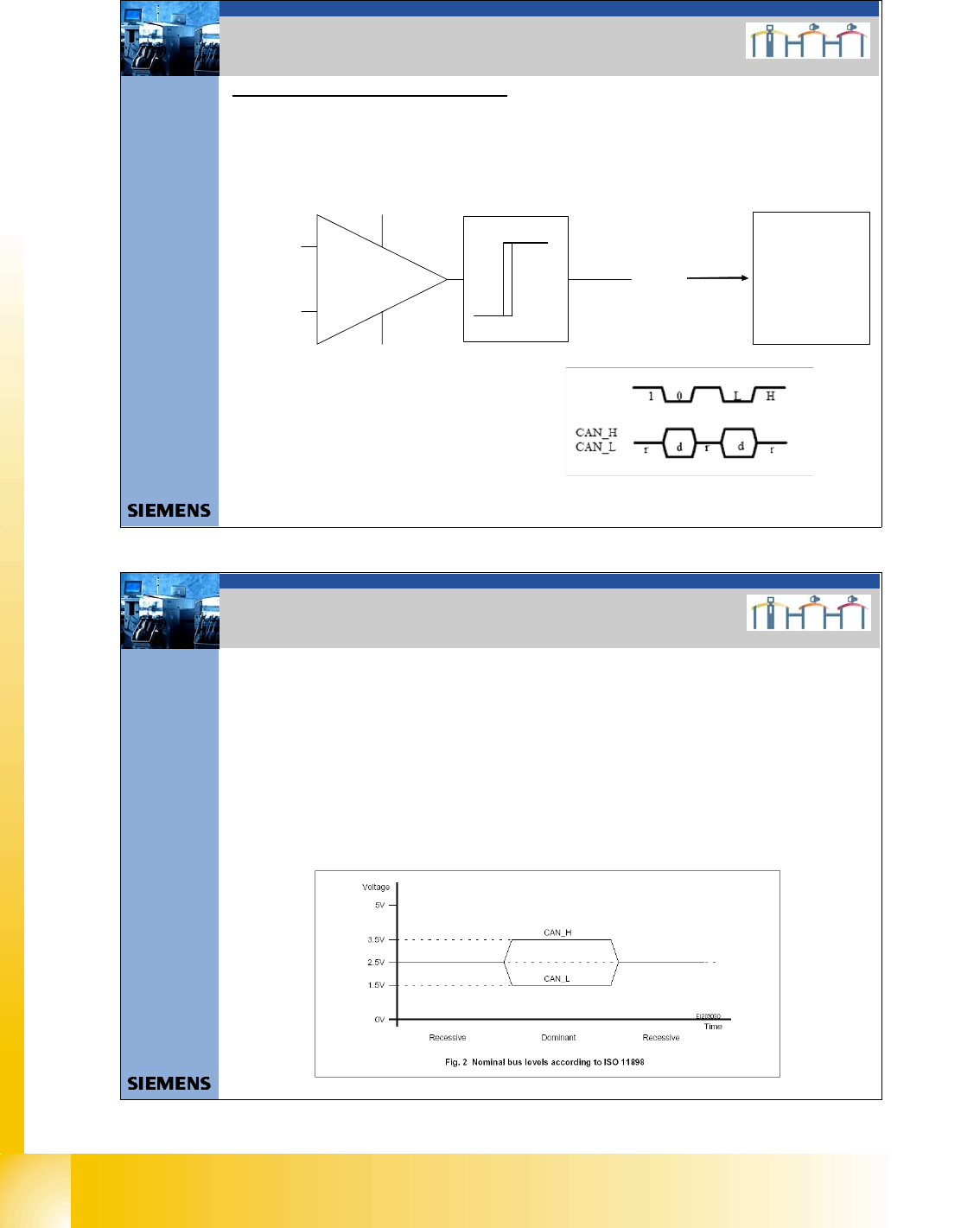
Die CAN Bus Signale für CAN_H und CAN_ L werden unterschieden in Recessiven und
Dominanten Level. Der Recessive Level bedeutet eine logische 1 und der Dominate Level
eine logische 0.
Beide Signale werden in einen TTL Signal konvertiert und dem Prozessor als RxD Signal
übermittelt. Die Phasenlage des RxD Signals entspricht dem CAN_L Signal.
CAN_L
CAN_H
RxD
TTL Pegel
(Level)
16bit Can
processor
TQM module
CAN_H : Recessive Signal (r)
Logic 1 (1)
High (H)
CAN_L: dominate Signal (d)
Logic 0 (0)
Low (L)
RxD
CAN BUS Siplace
20Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
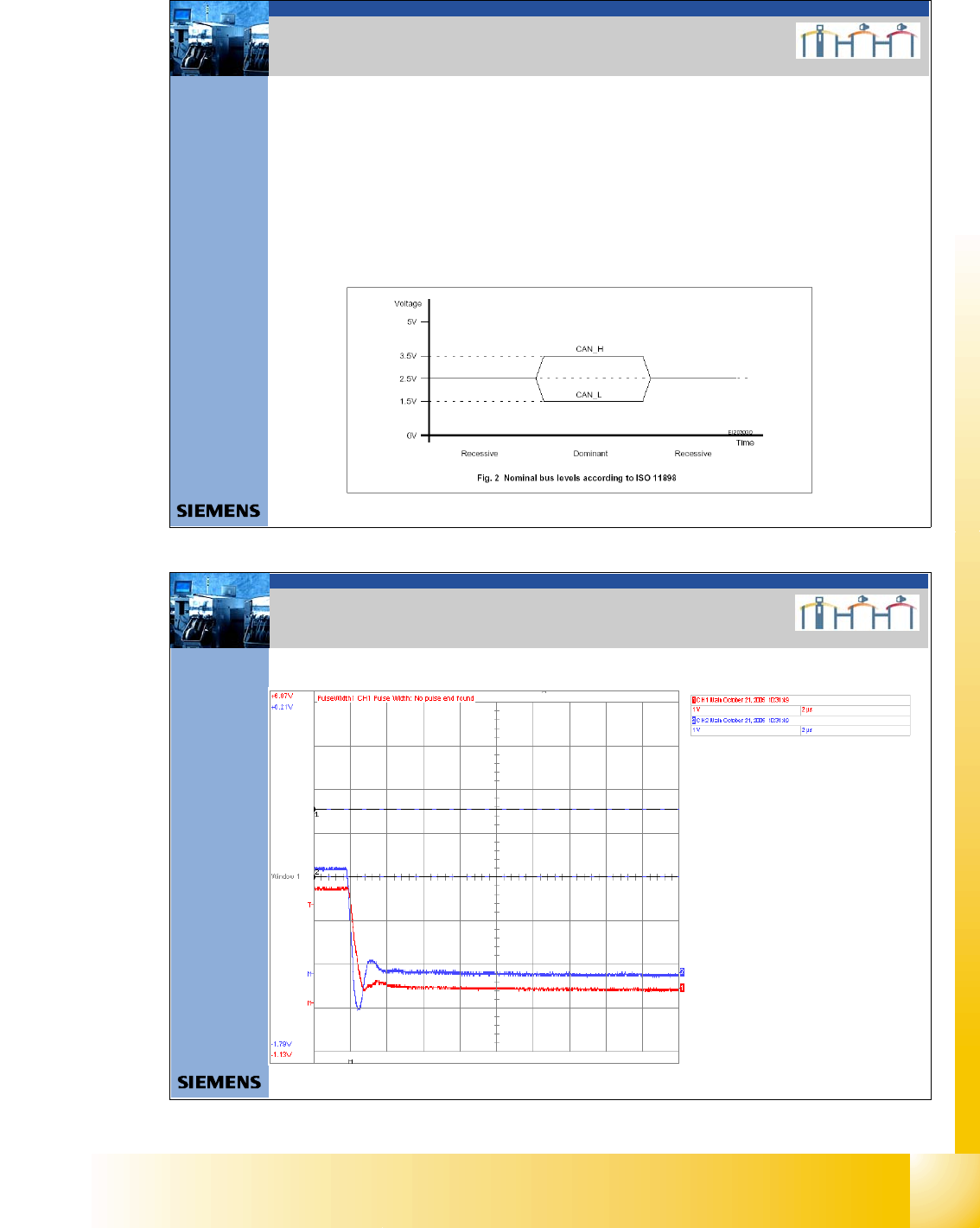
3. Messung der Spannungspegel
Bei den CAN- Pegel für CAN_H und CAN_ L wird zwischen rezessiven und dominanten
Pegel unterschieden.
Rezessive Pegel = Logisch „1“
Achtung: Maschine einschalten, muss sich aber im Ruhezustand befinden
(keine CAN Telegramme)!
Die rezessiven Pegel kann statisch mit einem Voltmeters ermittelt werden. Während der
Messung dürfen keine Telegramme gesendet werden. Somit darf die Messung nur im
Stillstand der Maschine durchgeführt werden. Die Messung erfolgt jeweils gegen GND (Pin 3
oder 6).
Sollwert: 2.5 +/- 0,3V für CAN_H
2.5 +/-0,3V für CAN_L
CAN BUS Siplace
1 - 13
Student Guide CAN BUS Workshop
Ausgabe 06/2008 3 CAN BUS
13
21Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
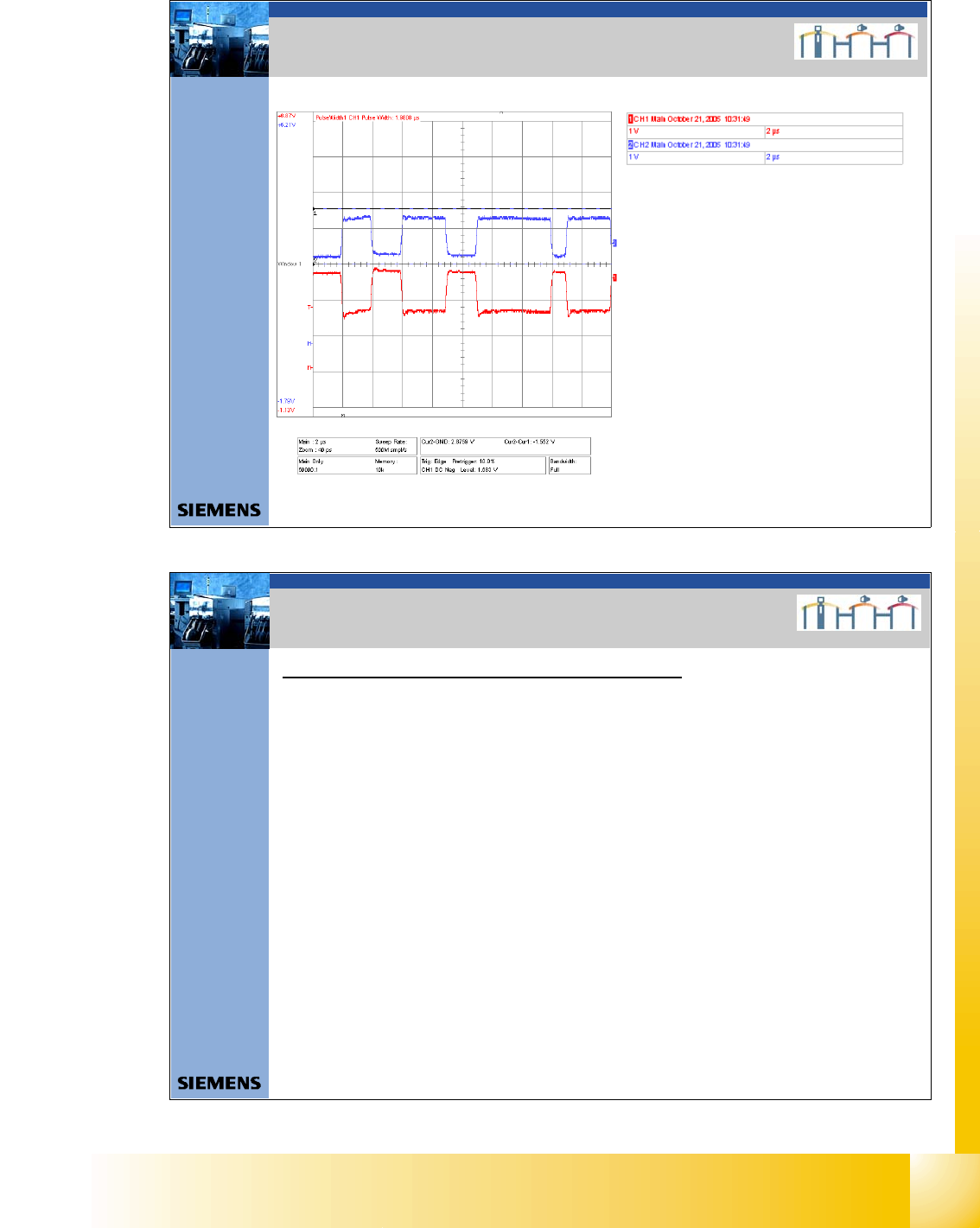
3. Messung der Spannungspegel
Dominante Pegel = Logisch „0“
Für die Messung der dominanten Pegel ist ein Oszilloskop notwendig. Zur Messung werden
CAN_H und CAN_L mit Hilfe der „CAN- Testbox“ abgegriffen. Um eine möglichst geringe
Beeinflussung der CAN- Signale durch den Messaufbau zu erreichen, muss auf möglichst
kurze Messleitungen geachtet werden. Die Testbox wird am CAN- Servicestecker COM
Board angeschlossen (X6 für BB1 oder X7 für BB2).
Sollwerte: CAN_H 3.5V ( 2.75 – 4.5V);
CAN_L 1.5V (2.0 – 1.0V)
CAN BUS Siplace
22Datum06/2008 Version 03 CAN Bus W orkshop Mathias Michel
SIPLACE Campus
Automation and Drives
3. Beispiele für mögliche Fehlerquellen
1. Kurzschluß zwischen CAN High – Signal und Maschinen Masse
CAN High - Pegel
CAN Low -Pegel
CAN BUS Siplace