CAN Bus Workshop_Version 03__ 06_2008_DE.pdf - 第81页
1 - 19 S tudent Guid e CAN BU S Wor kshop Ausgabe 06/2 008 3 CAN BU S 19 33 Datum 06/2008 Versio n 0 3 CAN B u s Wo rkshop Mat hia s M ic hel SIPL ACE Ca mp us A uto ma tion and Dri ves 4. Überbli ck C AN Bus Str u k tur…
1 - 18
Student Guide CAN BUS Workshop
3 CAN BUS Ausgabe 06/2008
18
31Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
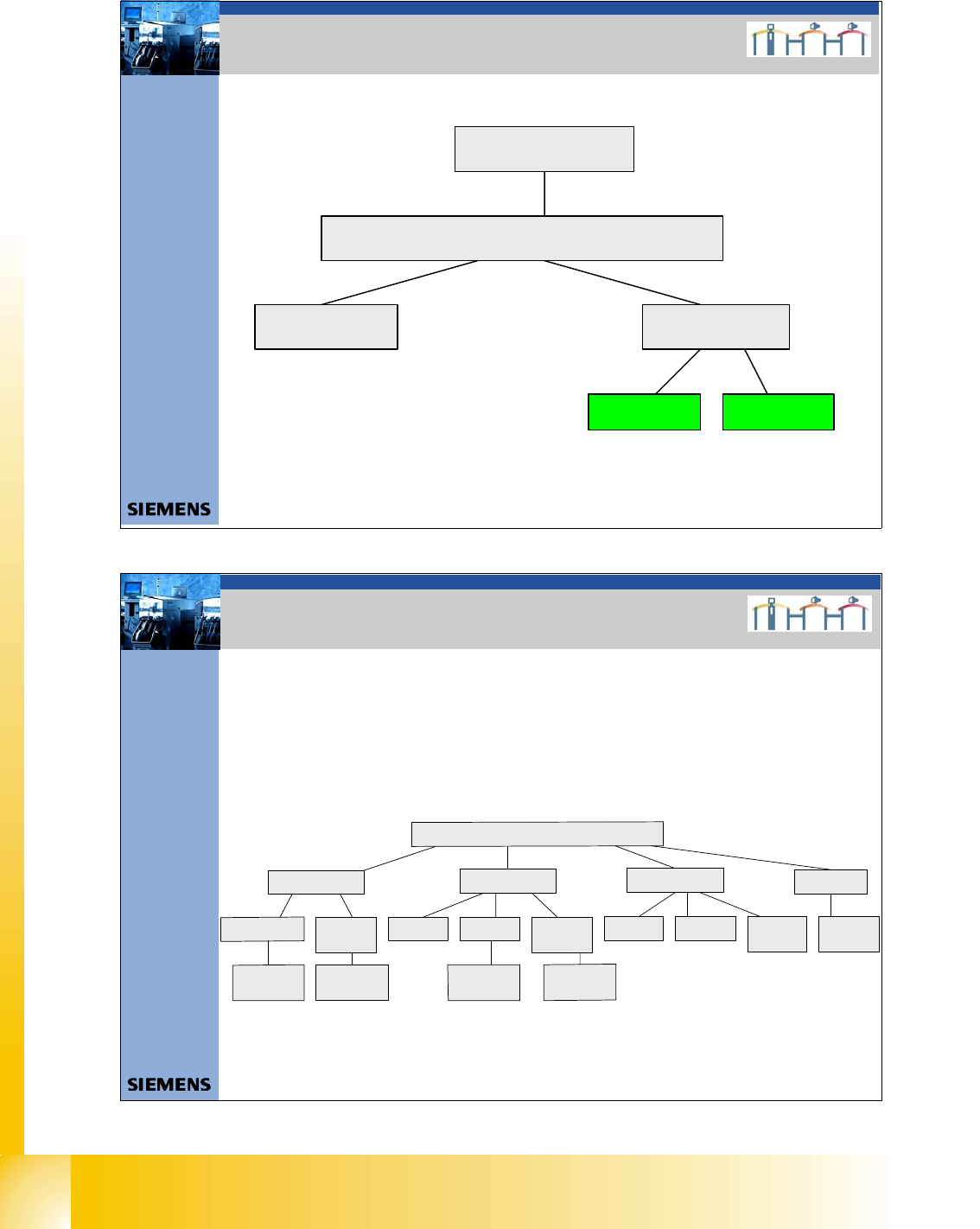
4. Überblick CAN Bus Struktur Siplace HF/3
HF/3
COM KSP 352 COM KSP354
Universalkabelbaum
Version 02Version 01
CAN BUS Siplace
32Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
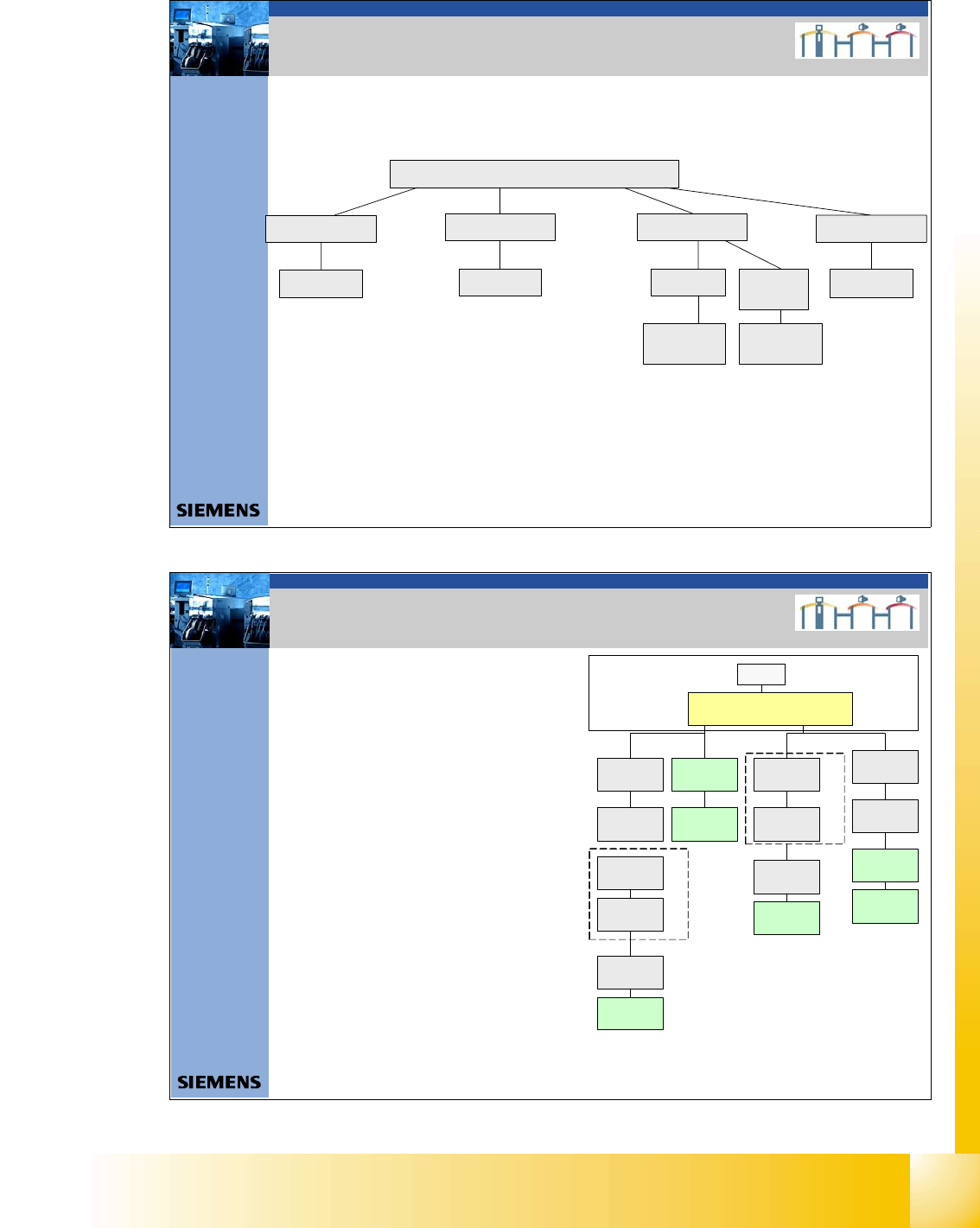
4. Überblick CAN Bus Struktur Siplace X
Mit den neuen stationären Kameras, ist die Vision control unit (VCU) implementiert. Dadurch können die
VCU`s aus den Sektoren entfallen. Dadurch wird an den Stellplätzen ein zusätzlichen CAN Bus Anschluß
benötigt. Damit ergeben sich je Maschinentyp und Kopfkonfiguration unterschiedliche CAN Bus Strukturen
an den Stellplätzen (Stellplätze 1, 2, 3 oder 4).
Mit der SW 605 ist es möglich einen WPC 4 an den Maschinen X 2 (Stellplatz 2 und 4) und X3 (Stellplatz 3)
zu installieren. Der WPC wird dann über einen Sub CAN Bus gesteuert. Dazu wird die Platine Interface 1-
Wire CAT5 gegen die Platine Interface 1-Wire CAN2 mit einem zusätzlichen CAN Bus Anschluß getausch.
X
-
S
e
r
i
e
X
2
X
3
X
4
V
a
r
i
a
n
t
e
1
V
a
r
i
a
n
t
e
2
V
a
r
i
a
n
t
e
1
V
a
r
i
a
n
t
e
2
N
u
r
V
a
r
i
a
n
t
e
2
V
a
r
i
a
n
t
e
3
m
i
t
C
A
N
K
n
o
t
e
n
V
a
r
i
a
n
t
e
3
u
n
d
W
P
C
4
V
a
r
i
a
n
t
e
3
u
n
d
W
P
C
4
X
4
I
V
a
r
i
a
n
t
e
3
m
i
t
C
A
N
K
n
o
t
e
n
V
a
r
i
a
n
t
e
3
m
i
t
C
A
N
K
n
o
t
e
n
V
a
r
i
a
n
t
e
3
m
i
t
C
A
N
K
n
o
t
e
n
V
a
r
i
a
n
t
e
2
u
n
d
W
P
C
4
V
a
r
i
a
n
t
e
2
u
n
d
W
P
C
4
CAN BUS Siplace
1 - 19
Student Guide CAN BUS Workshop
Ausgabe 06/2008 3 CAN BUS
19
33Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
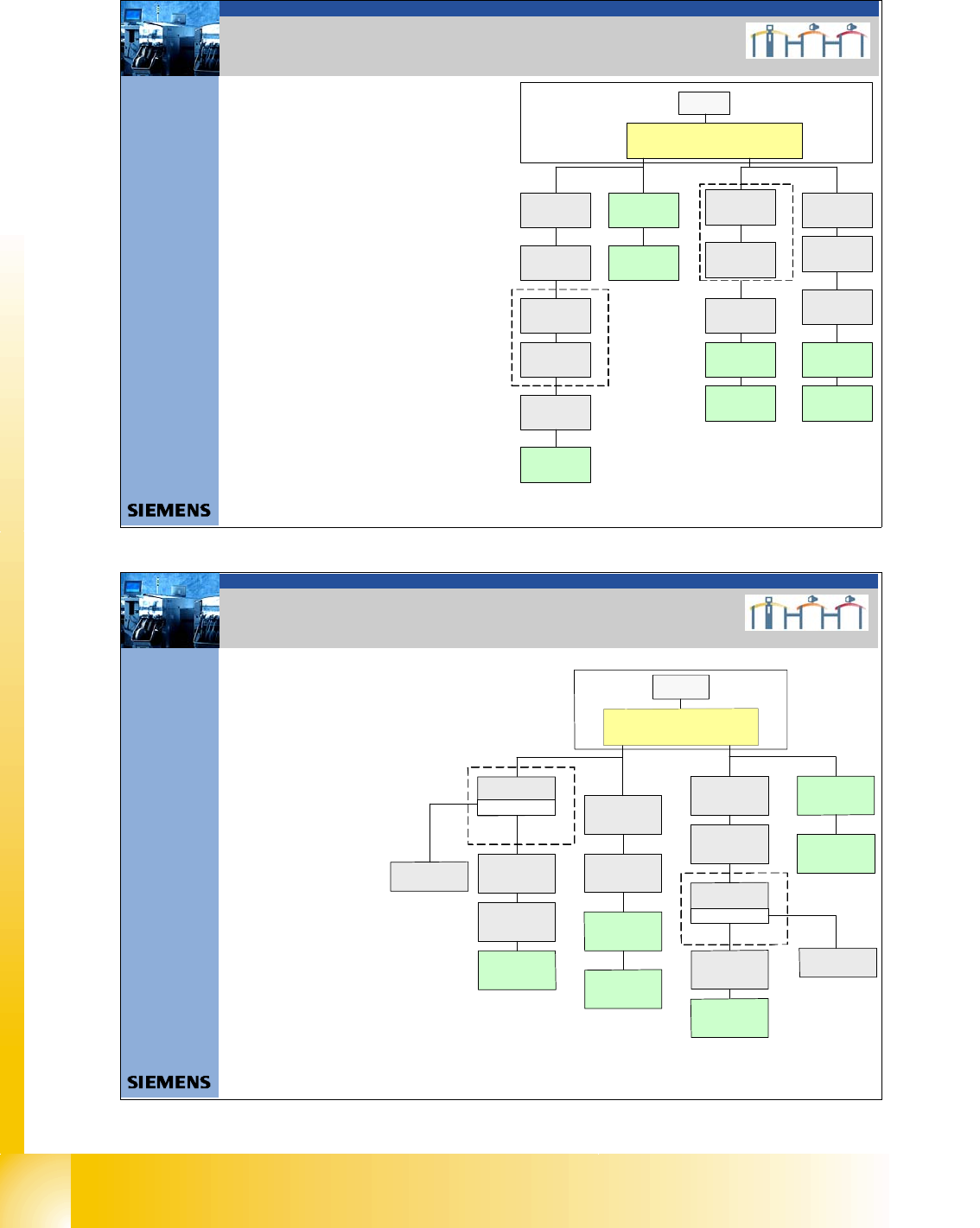
4. Überblick CAN Bus Struktur Siplace D-Serie
D- serie
D 1
D 2 D3 (X3)
Variante 1 Variante 1
D 4
Variante 1
Variante 2
Variante 3 und
WPC 4
Variante 3
mit CAN
Knoten
Va riante 2
und WPC 4
CAN BUS Siplace
34Datum06/2008 Version 03 CAN Bus W orkshop Mathias Michel
SIPLACE Campus
Automation and Drives
4. CAN Bus Struktur Siplace HF aktuell
SMP BUS
C
O
M
U
n
i
t
K
S
P
3
5
4
MC
CAN Bus cable 2
Computer Unit
For each Placementarea one CAN Bus!
* with SW 505 Gantry 2 is changed to gantry 3
new cable loop!
new circuit diagram!
Trailing cable-
Interface
Gantry 1
Transport
COT 1
Tape cutter
Control unit
CAN Bus cable 1
CAN E/
AModu
l
Sektor
4
CAN E/
A
Modu
l
Sektor
4
CAN E/
AModu
l
Sektor
4
CAN I/O
SUB Module
Section 4
Vision
Control unit
SUB Distributor Section 4
Section 4
COT 4 / MT C
Tape cutter
Vision
Section 2
CAN I/O
Main Module
Section 2
Main Distributor Section 2
Control unit
COT 2 / MTC
Tape cutter
Axis unit
PA 2
COT 3
Tape cutter
Trailing cable-
Interface
Gantry 3*
x6pnx11pn
Head board(C5 00)
Gantry 1
Terminator
(120 OHM)
Head board(C500)
Gantry 3*
Te rm inator
(120 OHM)
Terminator (120 OHM)
[near the trailingcab le
in ter fac e ]
Terminator (120 OHM)
[near the trailingcable
in ter fac e ]
- CAN Bus Struktur mit SW 505.xx
- Com Baugruppe KSP 354
- Universalkabelbaum
(Beschriftung am Kabel (0301xxxx-0x)
- ein CAN Bus für jeden Bestückbereich.
CAN BUS Siplace
1 - 20
Student Guide CAN BUS Workshop
3 CAN BUS Ausgabe 06/2008
20
35Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
4. CAN Bus Struktur Siplace HF/3 Aktuell
- CAN Bus Struktur mit SW 505.xx
- Com Baugruppe KSP 354
- Universalkabelbaum
(Beschriftung am Kabel (0301xxxx-0x)
- ein CAN Bus für jeden Bestückbereich.
SM P BU S
C
O
M
U
n
i
t
K
S
P
3
5
4
MC
CAN Bus cable 2
Computer Unit
Trailing cable-
Interface
Gantry 4
Tr ansport
COT 1
Tape cutter
Control unit
CAN Bus cable 1
CAN E/
A
Modu
l
Se ktor
4
CAN E/
A
Modu
lSektor
4
CAN E/
A
Modu
l
Se ktor
4
CAN I/O
SUB Module
Section 4
Vision
Control unit
SUB Distributor Section 4
Section 4
COT 4
Tape cutter
Vision
Section 2
CAN I/O
Main Module
Section 2
Main Distr ibutor Section 2
Control unit
COT 2 / MTC
Tape cutter
Axis unit
PA 2
COT 3
Tape cutter
Trailing cable-
Interface
Gantry 3
x6pnx11pn
Head board(C500)
Gantry 1
Terminator
(120 OHM )
Head board(C500)
Gantry 3
Te r m ina to r
(120 OHM)
Terminator ( 120 OHM)
[near the trailingcable
interface]
Axis unit
PA 1
Head board(C500)
Gantry 4
Terminator
(120 OHM)
Trailing cable-
Interface
Gantry 1
CAN BUS Siplace
36Datum06/2008 Version 03 CAN Bus W orkshop Mathias Michel
SIPLACE Campus
Automation and Drives
4. CAN Bus Struktur Siplace X2
-CAN Bus Struktur mitSW 605.xx
- Com unit KSP 168
- Universalkabelbaum (Beschriftung am
Kabel 0301xxxx-0x)
- ein CAN Bus für jeden BB.
- Die stationären Kameras
Version >=04 haben die
Beleuchtungssteuerung
(VCU) nicht mehr in den
Sektoren 2 u. 4 sondern
direkt in den Kameras
integriert.
Der CAN Bus wird an dem
jeweiligem Stellplatz aufgetrennt
und ein zusätzlicher CAN BUS
Anschluß eingefügt.
- Bei einer X2 kann dies am
Stellplatz 1 und / oder 3 sein.
- Bei dieser Version wird das Schneidgerät,
PPW und die Sensoren der Abwurfbehälter
über den CAN Knoten gesteuert.
S
M
P
B
U
S
C
o
m
p
u
t
e
r
U
n
i
t
C
O
M
U
n
i
t
1
6
8
C
A
N
B
u
s
c
a
b
l
e
P
A
1
X
6
p
n
T
r
a
i
l
i
n
g
I
n
t
e
r
f
a
c
e
G
a
n
t
r
y
1
T
r
a
n
s
p
o
r
t
C
o
n
t
r
o
l
u
n
i
t
C
O
T
1
(
o
p
t
i
o
n
a
l
s
t
a
t
.
C
a
m
e
r
a
v
e
r
s
.
0
4
)
/
C
A
N
N
o
d
e
(
T
a
p
e
c
u
t
t
e
r
,
N
C
)
C
A
N
I
/
O
S
u
b
M
o
d
u
l
e
C
O
T
4
/
M
T
C
2
C
A
N
N
o
d
e
(
T
a
p
e
c
u
t
t
e
r
,
N
C
)
S
U
B
D
i
s
t
r
i
b
u
t
o
r
S
e
c
t
o
r
4
T
e
r
m
i
n
a
t
o
r
1
2
0
O
h
m
H
e
a
d
b
o
a
r
d
(
C
5
0
0
)
G
a
n
t
r
y
1
T
e
r
m
i
n
a
t
o
r
(
1
2
0
O
H
M
)
C
A
N
B
u
s
c
a
b
l
e
P
A
2
X
7
p
n
M
a
i
n
D
i
s
t
r
i
b
u
t
o
r
S
e
c
t
o
r
2
C
O
T
3
(
o
p
t
i
o
n
a
l
s
t
a
t
.
C
a
m
e
r
a
v
e
r
s
.
0
4
)
C
A
N
N
o
d
e
(
T
a
p
e
c
u
t
t
e
r
,
N
C
)
A
x
i
s
u
n
i
t
P
A
2
(
o
n
l
y
A
x
e
s
f
o
r
P
A
2
)
C
A
N
I
/
O
M
a
i
n
M
o
d
u
l
e
C
O
T
2
/
M
T
C
2
C
A
N
n
o
d
e
(
T
a
p
e
c
u
t
t
e
r
,
N
C
)
T
r
a
i
l
i
n
g
I
n
t
e
r
f
a
c
e
G
a
n
t
r
y
3
T
e
r
m
i
n
a
t
o
r
1
2
0
O
h
m
H
e
a
d
b
o
a
r
d
(
C
5
0
0
)
G
a
n
t
r
y
3
T
e
r
m
i
n
a
t
o
r
(
1
2
0
O
H
M
)
A
x
i
s
u
n
i
t
P
A
2
(
o
n
l
y
A
x
e
s
f
o
r
P
A
1
)
M
C
O
p
t
i
o
n
a
l
W
P
C
4
L
o
c
a
t
i
o
n
4
C
A
N
B
u
s
2
i
n
P
A
1
I
n
t
e
r
f
a
c
e
1
-
w
i
r
e
C
A
N
2
3
0
6
5
8
0
5
-
0
1
O
p
t
i
o
n
a
l
W
P
C
4
L
o
c
a
t
i
o
n
2
I
n
t
e
r
f
a
c
e
1
-
w
i
r
e
C
A
N
2
3
0
6
5
8
0
5
-
0
1
C
A
N
B
u
s
2
i
n
P
A
2
CAN BUS Siplace