KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第294页
4 - 189 1) 送り方法 ① 自動送り ある一定の間隔で,次々と搭載位置をカメラで捕らえていきます。以下の 「自動送り 間隔」で 設定した時間だ け停止し ,時間経過後に 次点に移動しま す。 (自動送り間隔) スライダーバーにて,停止間隔を調整します。最小は 10m sec で最大は 5秒まで設定可能です ② 手動送り ユーザーが操作するまで,次点への移動は,ずっと停止します。 2) 追尾範囲 搭載データの何点目か ら何点目…
4 - 188
4-12-5-3. 搭載位置カメラ追尾
搭載位置カメラ追尾搭載位置カメラ追尾
搭載位置カメラ追尾
カメラにより搭載位置を追尾します。モニタに表示される搭載位置を目視することにより,入
力座標が不良であればHODを操作してティーチングによる修正が行えます。(生産時の追尾
は第7章生産手順を参照して下さい)
■
■■
■ 搭載位置
搭載位置搭載位置
搭載位置追尾の流れ
追尾の流れ追尾の流れ
追尾の流れ
マシン操作メニュー
搭載位置
搭載位置カメラ追尾
の条件設定
搭載位置カメラ追尾
実行
モニターにて座標を
目視
HODによるティー
チング
各座標の修正を反映
各座標の修正
選択
各搭載データ座標へ移動
実行
(1) 条件設定
条件設定条件設定
条件設定
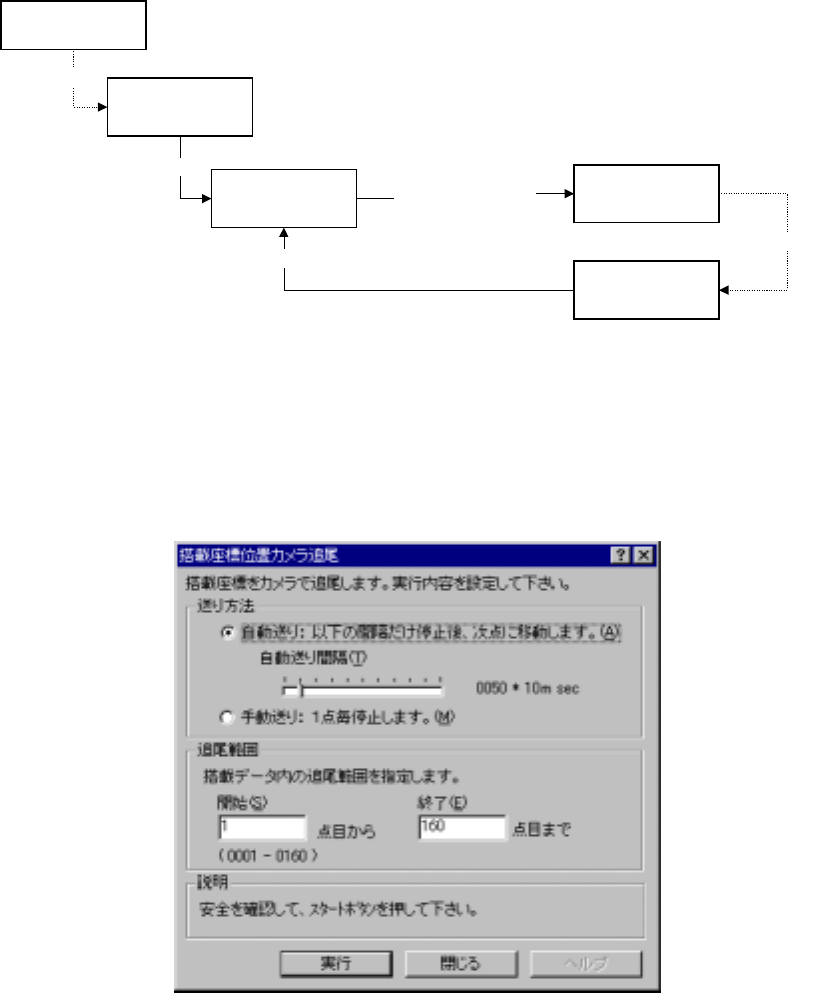
プログラム編集メニュー「マシン操作」メニューの「搭載位置」を選択すると以下の実行
条件ダイアログが表示されます。
図
図図
図 4-12-5-3-1
搭載座標位置カメラ追尾ダイアログ
搭載座標位置カメラ追尾ダイアログ搭載座標位置カメラ追尾ダイアログ
搭載座標位置カメラ追尾ダイアログ

4 - 189
1) 送り方法
① 自動送り
ある一定の間隔で,次々と搭載位置をカメラで捕らえていきます。以下の
「自動送り間隔」で設定した時間だけ停止し,時間経過後に次点に移動します。
(自動送り間隔)
スライダーバーにて,停止間隔を調整します。最小は 10msec で最大は
5秒まで設定可能です
② 手動送り
ユーザーが操作するまで,次点への移動は,ずっと停止します。
2) 追尾範囲
搭載データの何点目から何点目までを範囲として追尾するかを入力します。デフォル
トでは全搭載点を実行します。
追尾条件の設定をすべて行い,準備ができたら<スタート>ボタンまたは<実行>を押しま
す。
また,<閉じる>を押すと元の画面に戻れます。
(2)
(2)(2)
(2) BOCマークアライメントの実行
BOCマークアライメントの実行BOCマークアライメントの実行
BOCマークアライメントの実行
実行直後,BOCマークが設定されている生産プログラムであれば,搭載位置の精度を向
上するためにBOCアライメントを実行します。(全回路のBOCを認識します)
図
図図
図 4-12-5-3-2
BOCアライメント中ダイアログ
BOCアライメント中ダイアログBOCアライメント中ダイアログ
BOCアライメント中ダイアログ
4 - 190
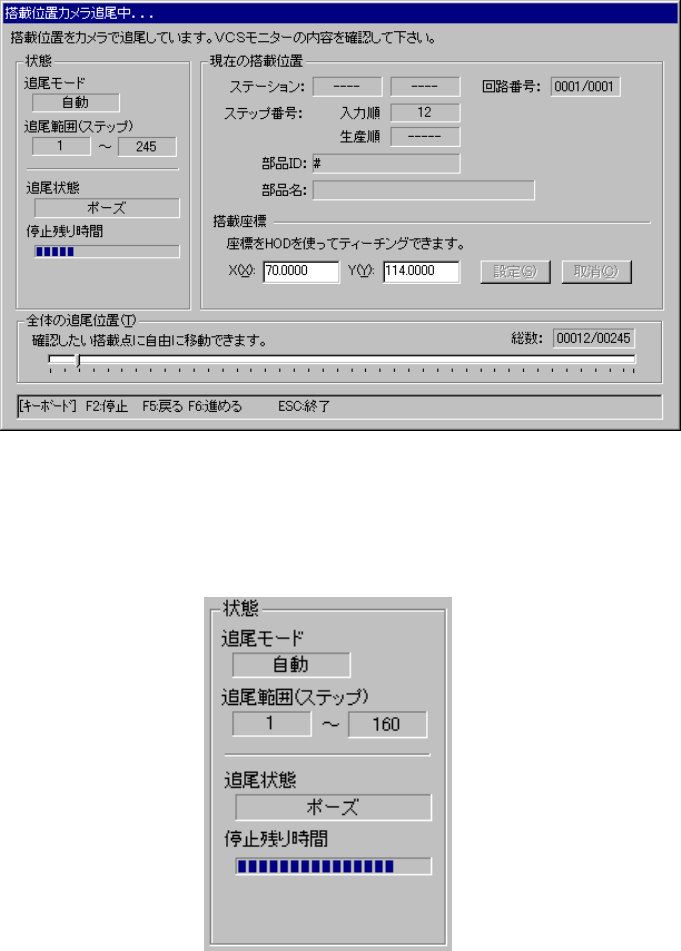
(3) 搭載座標位置カメラ追尾の実行中
搭載座標位置カメラ追尾の実行中搭載座標位置カメラ追尾の実行中
搭載座標位置カメラ追尾の実行中
実行後,各搭載座標の追尾中は以下のダイアログが表示されます。
図
図図
図 4-12-5-3-3
搭載位置カメラ追尾中ダイアログ
搭載位置カメラ追尾中ダイアログ搭載位置カメラ追尾中ダイアログ
搭載位置カメラ追尾中ダイアログ
1) 状態
状態状態
状態
① 追尾モード
送り方法で設定した「手動」か「自動」かが表示されます。
② 追尾範囲
全搭載データの場合は「最初」「最後」が表示されます。追尾範囲を変更した
場合はその番号が表示されます。
③ 追尾状態
「動作中」は,軸が移動中であることを示します。「ポーズ」は自動送りでの
一時停止中であることを示します。「停止」は手動送りまたは意図的に停止さ
せたときを示します。「軸待避中」は軸を安全位置に移動していることを示し
ます。「マーク認識中」はICマークを認識していることを示します。
④ 停止残り時間
自動送りでの一時停止残り時間をプログレスバーで表示します。