KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第317页
5 – 1 第5章 第5章 第5章 第5章 画像認識 画像認識 画像認識 画像認識 5-1. 概要 概要 概要 概要 5-1-1. 部品認識時の姿勢 部品認識時の姿勢 部品認識時の姿勢 部品認識時の姿勢 画像認識補正ヘッドが部品を吸着した状態の部品姿勢をVCSカメラで確認し,部品の重心位置,角 度ずれを求めます。同時にリード曲りの検出も行い,部品不良の検出も行います。基板搭載位置に移 動後,求められた重心位置…
4 - 211
4-13-3. 一括再呼出
一括再呼出一括再呼出
一括再呼出
一括再呼出は、プログラム中の部品データ、吸着データ、ビジョンデータをデータベースま
たは、常設情報から再度検索しプログラム中のデータを更新します。
● 一括再呼出をクリックすると以下のようなダイアログが表示されます。
ここで、[はい]を選択すると、全ての吸着角度を更新します。
[いいえ]を選択すると、吸着データで設定してあった角度を更新しません。
・ 一括再呼出しを実行すると、部品データ、吸着データ、ビジョンデータを上書きで更新
するため、部品フォームでの編集中に実行しても、キャンセルできません。
・ 一括再呼出しの常設情報、データベースからの呼出し条件は、環境設定にて変更できます。
・ 呼び出しを行った部品データのコメントが 30 文字を越える場合、30 文字までを有効
とし、コピーを行います。また、呼び出しを行った部品データのコメントに改行コー
ドが含まれていた場合、そのコード以降を無効とし、それ以前までのコメントを有効
とし、コピーします。
4-14. ヘルプ
ヘルプヘルプ
ヘルプ
オンラインマニュアルです。
4-14-1. バージョン情報
バージョン情報バージョン情報
バージョン情報
本プログラム(プログラム編集)についての情報が表示されます。
表示例.
5 – 1
第5章
第5章第5章
第5章 画像認識
画像認識画像認識
画像認識
5-1. 概要
概要概要
概要
5-1-1. 部品認識時の姿勢
部品認識時の姿勢部品認識時の姿勢
部品認識時の姿勢
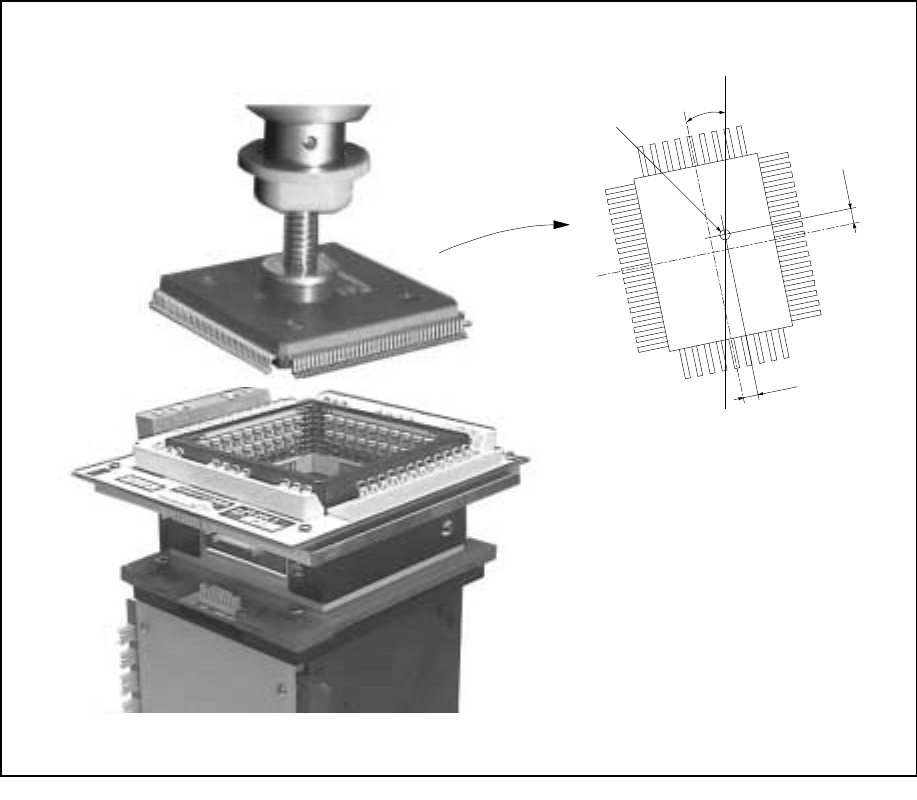
画像認識補正ヘッドが部品を吸着した状態の部品姿勢をVCSカメラで確認し,部品の重心位置,角
度ずれを求めます。同時にリード曲りの検出も行い,部品不良の検出も行います。基板搭載位置に移
動後,求められた重心位置,角度のズレを補正し搭載します。
図
図図
図 5
5 5
5-
--
-1
11
1-
--
-1
11
1-
--
-2
22
2
ノズル中心
θ
△
Y
△
X
5 – 2
5-2. ビジョンデータの入力
ビジョンデータの入力ビジョンデータの入力
ビジョンデータの入力
ビジョンデータは,ビジョンにより部品を認識するためのデータを扱います。
ビジョンデータの入力は,部品データでビジョンセンタリングを選択した以下の部品種別のものに
のみ行うことができます。
QFP,SOP,TSOP,TSOP2,PLCC(QFJ),BGA,SOJ,PQFP(BQFP)一方リードコネクタ,Jリードソ
ケット,ガルウィングソケット,バンパ付きソケット,アルミ電解コンデンサ,GaAsFET,二方向
リードコネクタ,SOP(ヒートシンク付タイプ),FBGA,Zリードコネクタ
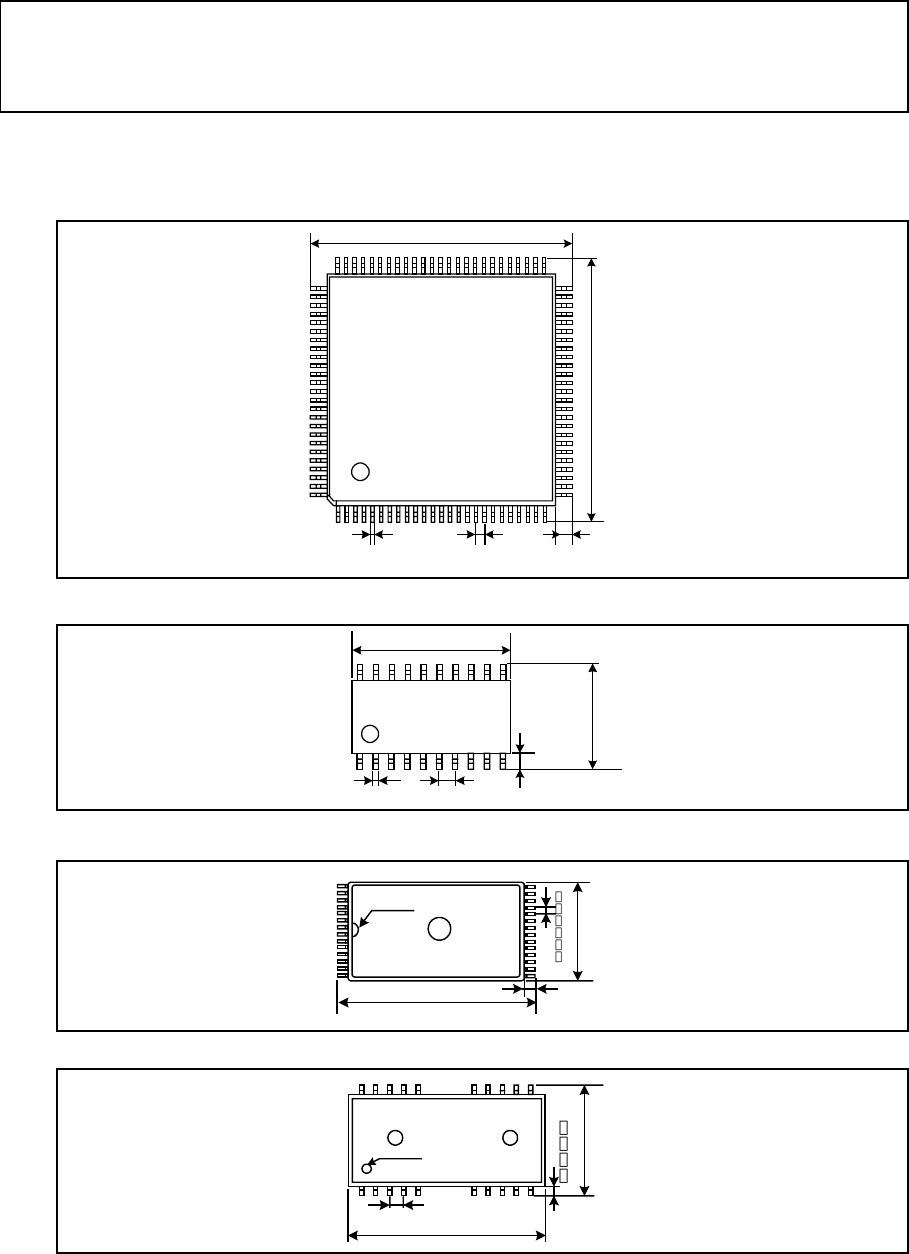
●下記に部品の種類を示します。データの設定時には下図で表す部品の向きを0°とします。
① QFP(図はトップビュー)
② SOP(図はトップビュー)
③ TSOP(図はトップビュー)
④ TSOP2(図はトップビュー)
外形寸法
1
11
1
外
形
寸
法
リード長
リードピッチリード幅
外形寸法
外
形
寸
法
リード長リードピッチリード幅
1
11
126
2626
26
50
5050
50
75
7575
75
外形寸法
外
形
寸
法
リード長
1
11
1
INDEX
外形寸法
外
形
寸
法
リードピッチ
INDEX