KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第298页
4 - 193 部品サイズによってモニターに表 示される部品中心および四 隅の表示は以下のように異なりま す。 部品サイズ 部品サイズ 部品サイズ 部品サイズ 部品の四隅 部品の四隅 部品の四隅 部品の四隅 部品の中心 部品の中心 部品の中心 部品の中心 短辺が4 . 5mm以下 の 部品 モニター上のウィンドウ枠で 表されま す。角度を設定した搭載点は ウィンド ウ枠自体が回転して表示されます。 クロスするラインの中心です…
4 - 192
(4) 追尾中の操作
追尾中の操作追尾中の操作
追尾中の操作
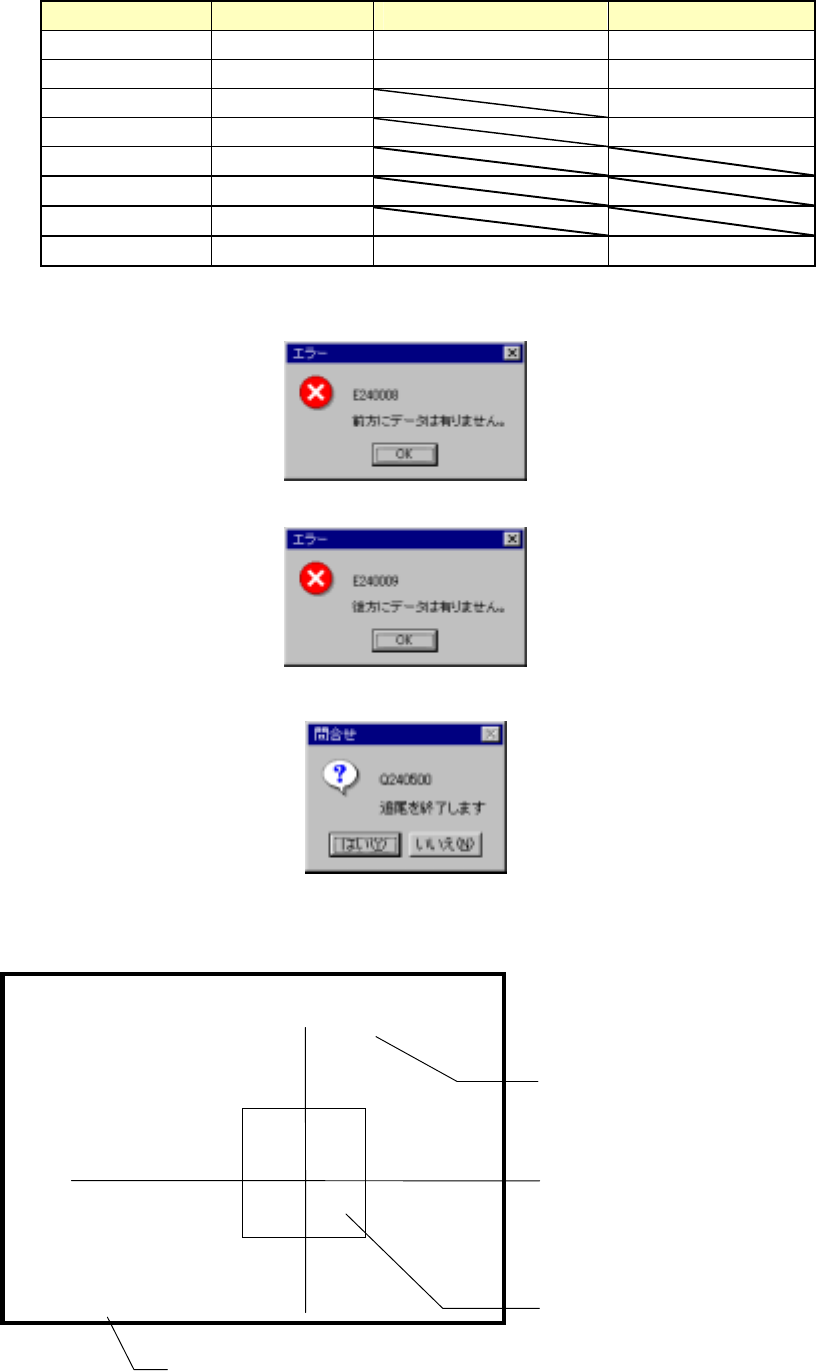
実行中は以下のキー/スイッチを使って動作を制御できます。
操作
操作操作
操作 キーボード
キーボードキーボード
キーボード オペレーションパネル
オペレーションパネルオペレーションパネル
オペレーションパネル HOD
HODHOD
HOD
追尾の開始 F1 スタートボタン ENTER
追尾の停止 F2 ストップボタン PAUSE
前点への移動 F5 PREVIOUS
次点への移動 F6 NEXT
ベリファイ検査 F7
SOT検査 F8
データ検査 F9
終了 停止中にESC 停止中にストップボタン 停止中に CANCEL
前点への移動でデータがそれ以上ない場合は以下のダイアログが表示されます。
次点への移動でデータがそれ以上ない場合は以下のダイアログが表示されます。
上記の操作で終了させた場合は以下のダイアログが表示されます。
(5) モニター表示
モニター表示モニター表示
モニター表示
実行中は各搭載点毎に以下の情報がモニター出力されます。
------- PLACE XY TRACE -------
Station:L またはR [ CENTER ]
Cur.No:回路番号
Pla.No :搭載番号
Compo:部品名
Angle :搭載角度
Pos X:座標 Y:座標
[CENTER」
部品中心を示している
[TOP-L][TOP-R][BTM-L][BTM-R]
部品の四隅を示します。
それぞれ上面左,上面右,下面左,
下面右を表します。
原点復帰位置からの座標を示しています。
部品の中心や,部品の四隅を示しています。
4 - 193
部品サイズによってモニターに表示される部品中心および四隅の表示は以下のように異なりま
す。
部品サイズ
部品サイズ部品サイズ
部品サイズ 部品の四隅
部品の四隅部品の四隅
部品の四隅 部品の中心
部品の中心部品の中心
部品の中心
短辺が4.5mm以下の
部品
モニター上のウィンドウ枠で表されま
す。角度を設定した搭載点はウィンド
ウ枠自体が回転して表示されます。
クロスするラインの中心です。
以外の部品
(大型部品)
それぞれ順番に[TOP-L][TOP-R]
[BTM-R][BTM-L]の順番に四隅座
標に移動します。角度を設定した搭載
点は四隅が回転した座標に移動しま
す。
四隅の移動後に最後に[CENTER」
と表示され中心に移動します。
(6) 追尾中の座標ティーチング
追尾中の座標ティーチング追尾中の座標ティーチング
追尾中の座標ティーチング
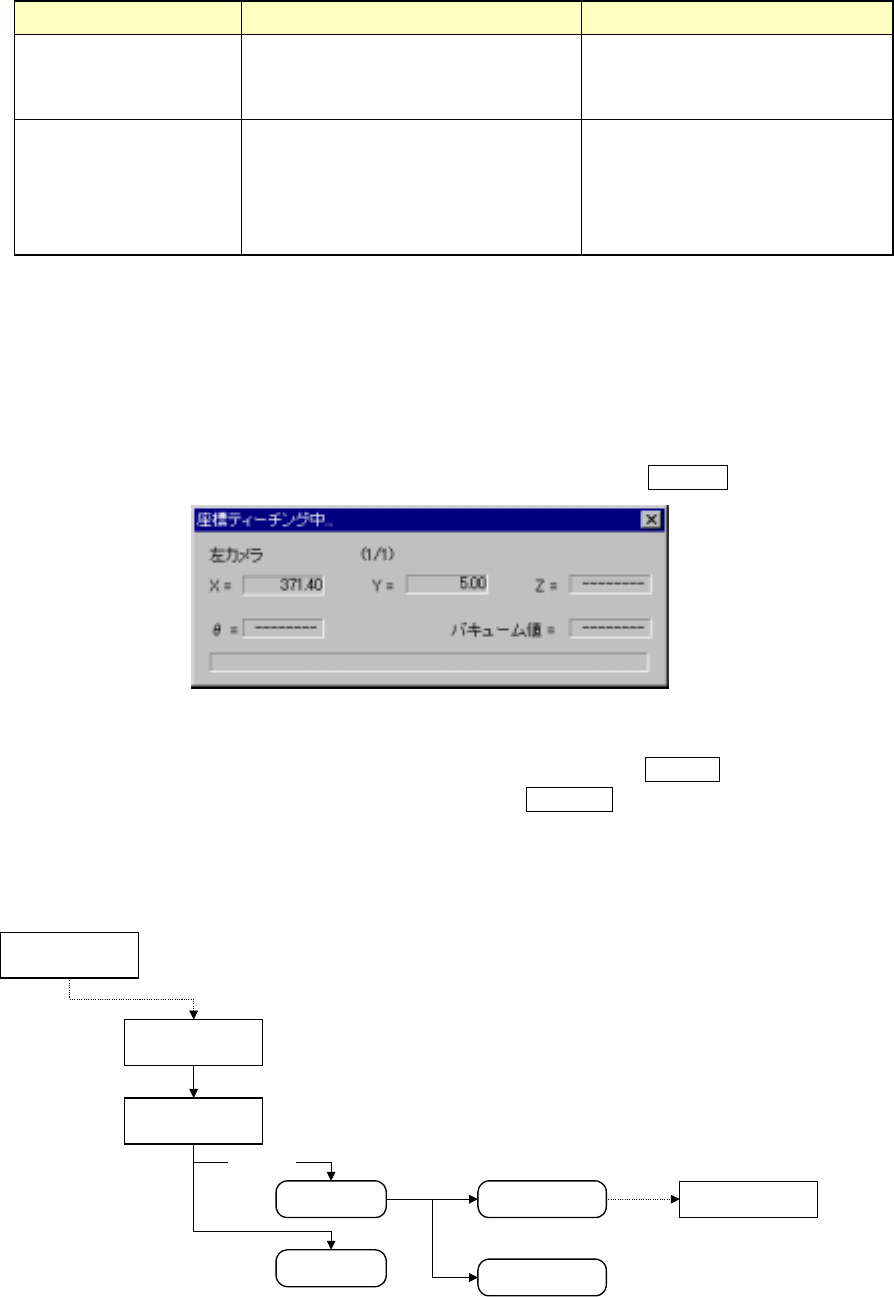
追尾した座標が実際と異なる場合,HOD使った操作で搭載座標をティーチングすること
ができます。
手順 1) カーソルをXまたはY座標に移動する。
手順 2) HODデバイスボタンを押し,座標ティーチングを行い ENTER で確定させる。
図
図図
図 4-12-5-3-4
ティーチング中ダイアログ
ティーチング中ダイアログティーチング中ダイアログ
ティーチング中ダイアログ
手順 3) 確定した座標値を有効にする場合は<設定>または再度 ENTER を押す。
座標を元に戻したい場合は<取消>または CANCEL を押す。
■
■■
■ 搭載追尾でのティーチング操作の流れ
搭載追尾でのティーチング操作の流れ搭載追尾でのティーチング操作の流れ
搭載追尾でのティーチング操作の流れ
搭載座標
XYエディットボックス
に入力フォーカス
HOD
デバイスキー押下
ENTER
CANCEL
ティーチング操作
[設定」ボタンまたは
ENTERを押す
搭載データ変更
[取消]ボタンまたは
CANCELを押す
座標確定後
4 - 194
4-12-5-4. 吸着位置カメラ追尾/吸着高さ追尾
吸着位置カメラ追尾/吸着高さ追尾吸着位置カメラ追尾/吸着高さ追尾
吸着位置カメラ追尾/吸着高さ追尾
カメラにより吸着位置を追尾します。モニタに表示される位置を目視することにより,入力座
標が不良であればHODを操作してティーチングによる修正が行えます。
またHMSを使うことにより吸着高さを追尾することができます。この場合,モニターにHM
Sからの検出値を逐次表示していきます。高さが著しく異なる場合,座標ティーチングと同様,
高さの値をティーチングできます。(生産時の追尾は第7章生産手順を参照して下さい)
■
■■
■ 吸着位置(高さ)追尾の流れ
吸着位置(高さ)追尾の流れ吸着位置(高さ)追尾の流れ
吸着位置(高さ)追尾の流れ
マシン操作メニュー
吸着位置/吸着高さ
吸着追尾
の条件設定
吸着位置(高さ)追
尾の実行
モニターにて座標
/HMS検出値を目視
HODによるティー
チング
各座標の修正を反映
各座標の修正
選択
各吸着データ座標へ移動
実行
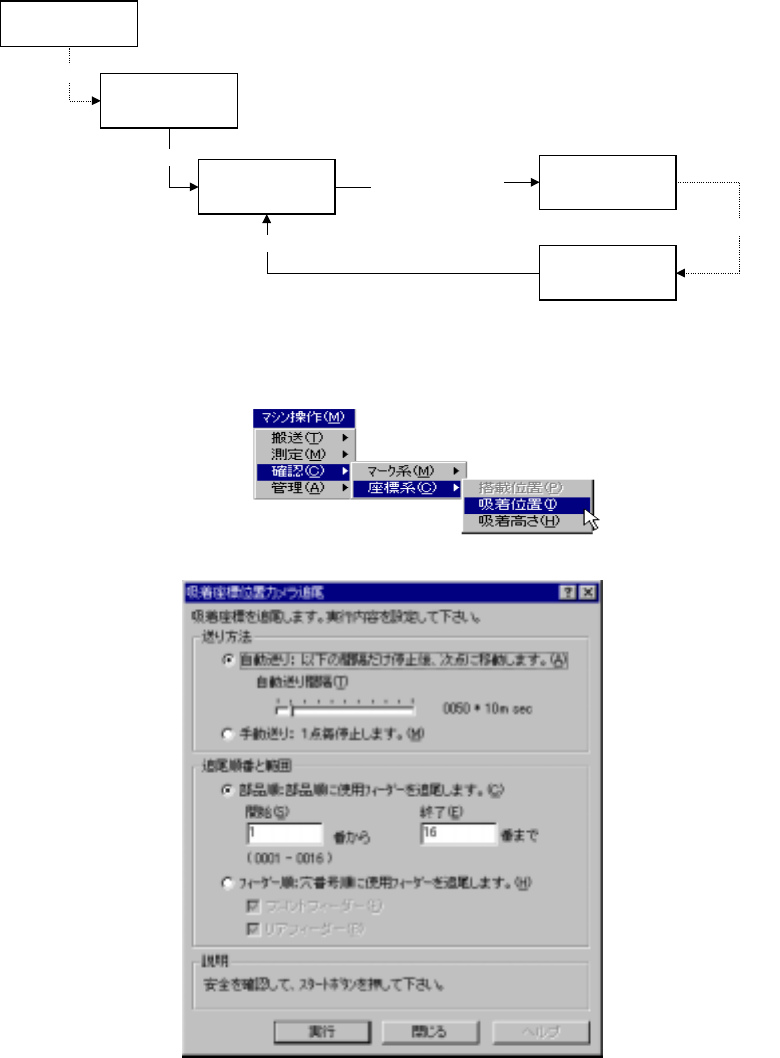
(1) 条件設定
条件設定条件設定
条件設定
吸着座標追尾を行う場合はプログラム編集メニュー「マシン操作」メニューの「吸着位
置」を選択すると以下の実行条件ダイアログが表示されます。
図
図図
図 4-12-5-4-1
吸着座標位置カメラ追尾(または吸着高さ位置HMS追尾)ダイアログ
吸着座標位置カメラ追尾(または吸着高さ位置HMS追尾)ダイアログ吸着座標位置カメラ追尾(または吸着高さ位置HMS追尾)ダイアログ
吸着座標位置カメラ追尾(または吸着高さ位置HMS追尾)ダイアログ