KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第306页
4 - 201 (5) モニター表示 モニター表示 モニター表示 モニター表示 ① 吸着座標追尾 実行中は各吸着点毎に以下の情報がモニター出力されます。 部品サイズによってモニターに表 示される部品中心および四 隅の表示は以下のように異なりま す。 フロントフィーダでの大型部品の 四隅表示は移動不可能座標 上にあることが多く表示されませ ん。 ( フロントフィーダ) フロントフィーダ) フロントフィーダ) フロントフ…
4 - 200
(4) 追尾中の操作
追尾中の操作追尾中の操作
追尾中の操作
実行中は以下のキー/スイッチを使って動作を制御できます。
操作
操作操作
操作 キーボード
キーボードキーボード
キーボード オペレーションパネル
オペレーションパネルオペレーションパネル
オペレーションパネル HOD
HODHOD
HOD
追尾の開始 F1 スタートボタン ENTER
追尾の停止 F2 ストップボタン PAUSE
前点への移動 F5 PREVIOUS
次点への移動 F6 NEXT
終了 停止中にESC 停止中にストップボタン 停止中に PAUSE
前点への移動でデータがそれ以上ない場合は以下のダイアログが表示されます。
次点への移動でデータがそれ以上ない場合は以下のダイアログが表示されます。
上記の操作で終了させた場合は以下のダイアログが表示されます。
4 - 201
(5) モニター表示
モニター表示モニター表示
モニター表示
① 吸着座標追尾
実行中は各吸着点毎に以下の情報がモニター出力されます。
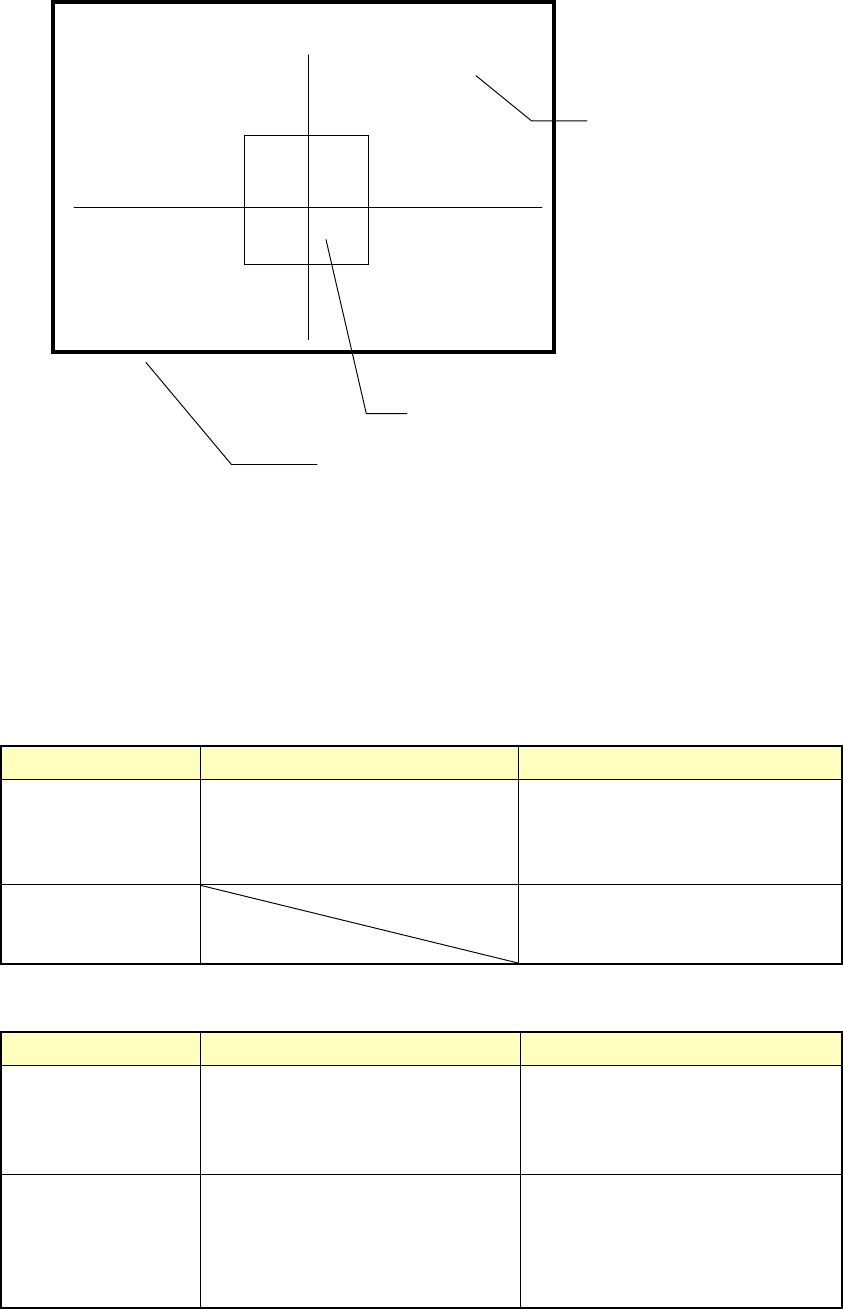
部品サイズによってモニターに表示される部品中心および四隅の表示は以下のように異なりま
す。
フロントフィーダでの大型部品の四隅表示は移動不可能座標上にあることが多く表示されませ
ん。
(フロントフィーダ)
フロントフィーダ)フロントフィーダ)
フロントフィーダ)
部品サイズ 部品の四隅 部品の中心
短辺が 4.5 mm 以下
の部品
モニター上のウィンドウ枠で表さ
れます。角度を設定した吸着点は
ウィンドウ枠自体が回転して表示
されます。
クロスするラインの中心です。
以外の部品
(大型部品)
[CENTER]と表示され中心に移動
します。
(リアフィーダ)
リアフィーダ)リアフィーダ)
リアフィーダ)
部品サイズ 部品の四隅 部品の中心
短辺が 4.5 mm 以下
の部品
モニター上のウィンドウ枠で表され
ます。
角度を設定した吸着点はウィンドウ
枠自体が回転して表示されます。
クロスするラインの中心です。
以外の部品
(大型部品)
それぞれ順番に[TOP-L][TOP-
R][BTM-R][BTM-L]の順番に
四隅座標に移動します。
角度を設定した吸着点は四隅が回転
した座標に移動します。
四隅の移動後に最後に[CENTER]
と表示され中心に移動します。
------- PICK XY TRACE -------
Station:L またはR [CENTER]
Device:荷姿
Fdr No :フィーダー番号
Compo:部品名
Angle :供給角度
Pos X:座標 Y:座標
[CENTER]
部品中心を示している
[TOP-L][TOP-R][BTM-L][BTM-R]
部品の四隅を示します。
それぞれ上面左,上面右,下面左,
下面右を表します。
原点復帰位置からの座標を示しています。
部品の中心や,部品の四隅を示しています。
4 - 202
② 吸着高さ追尾
実行中は各吸着点毎に以下の情報がモニター出力されます。
部品サイズによるHMS計測位置は以下のとおりです。
部品サイズ 部品の高さ計測位置
全部品
部品中心
(6) 追尾中の座標ティーチング
追尾中の座標ティーチング追尾中の座標ティーチング
追尾中の座標ティーチング
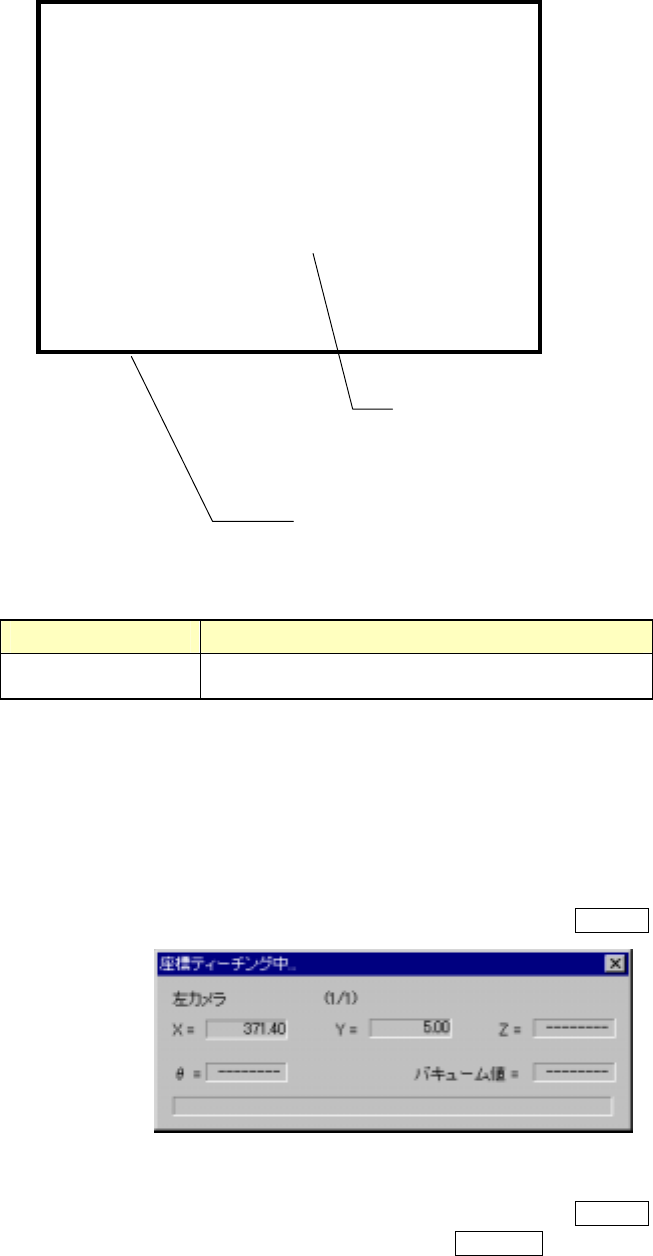
追尾した座標が実際と異なる場合,HOD使った操作で吸着座標をティーチングすること
ができます。
手順 1) カーソルをXまたはYまたはZ座標に移動する。
手順 2) HODデバイスボタンを押し,座標ティーチングを行い ENTER で確定させる。
ティーチング中ダイアログ
ティーチング中ダイアログティーチング中ダイアログ
ティーチング中ダイアログ
手順 3) 確定した座標値を有効にする場合は<設定>または再度 ENTER を押す。
座標を元に戻したい場合は<取消>または CANCEL を押す。
------- PICK Z TRACE -------
Station:L または
Device:荷姿
Fdr No :フィーダー番号
Compo:部品名
Angle :供給角度
Z : < データ値 >
Hms : < 検出値 >
Pos X:座標 Y:座標
原点復帰位置からの座標を示しています。
部品の中心で停止後,吸着データの高さ値と
HMSで検出された高さ値を表示します。
HMSで検出不可の場合は< ***** >となります。