SiplaceX4_en.pdf - 第395页
1 - 29 S tudent Guide SIPLACE X Edition 09/2005 8 Collect&Place-Head 20 29 8.3 Pickup and Placement Cycle for Collect & Place Head 20 8.3.1 Working Positions at the Placement Head Fig. 8.3 - 1 Working positions a…
1 - 28
Student Guide SIPLACE X
8 Collect&Place-Head 20 Edition 09/2005
28
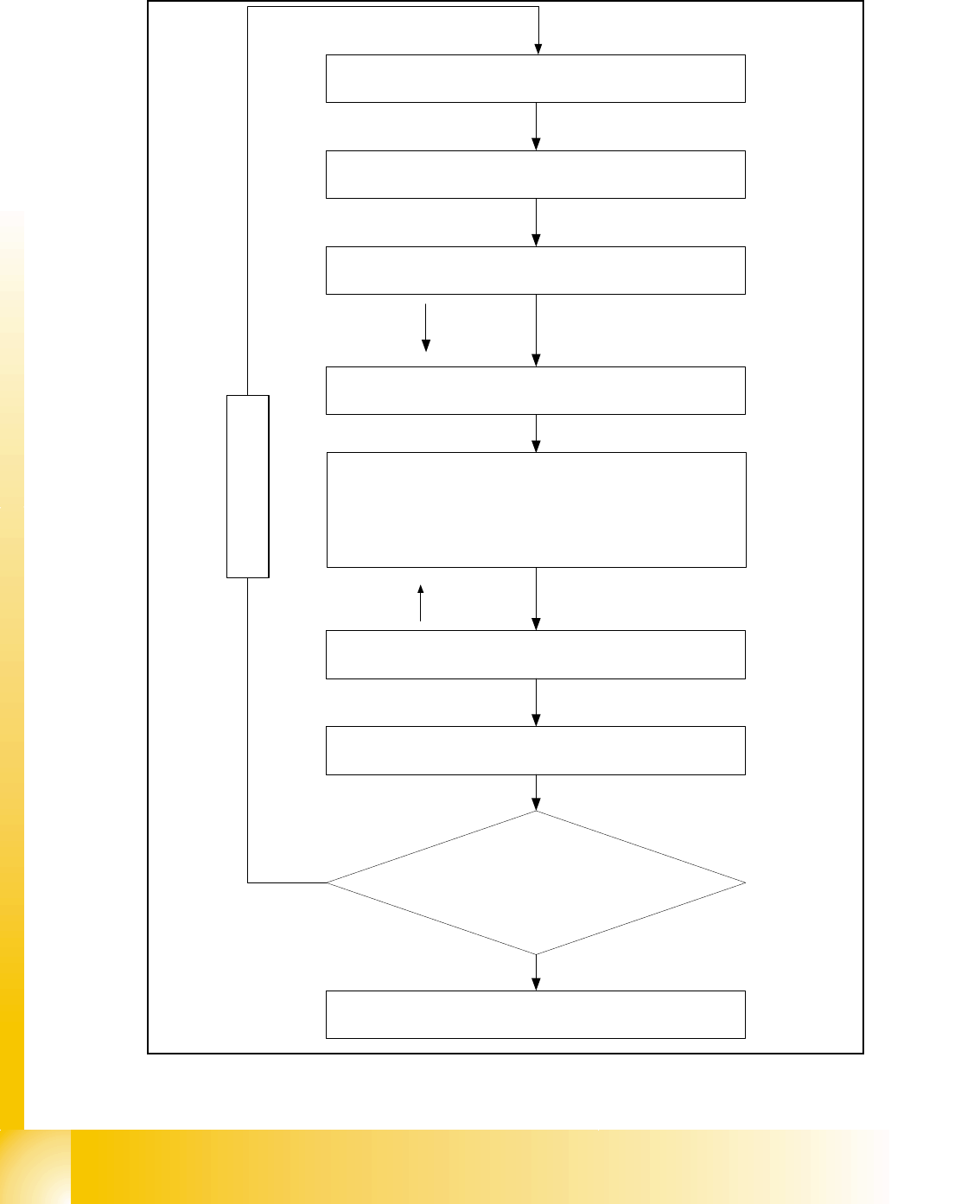
8.2.10 Sequence of height reference run
Fig. 8.2 - 10 Flow chart height reference run
Turn the Star-axis
... to Segment n
Vacuum measurment
"open"
read out Z- Position for component sensor
Z-Axis touch the Transport rail
End signal Z-Axis
--> Determine the nozzle length (with Z-pos.)
--> Determine Vacuum "closed"
read out Z-position for component sensor
End with Segment n
Z-Axis
Z-Axis
Segment n+1
Height reference run
Segment 20 ?
No
End Height
reference run
Yes
1 - 29
Student Guide SIPLACE X
Edition 09/2005 8 Collect&Place-Head 20
29
8.3 Pickup and Placement Cycle for Collect & Place
Head 20
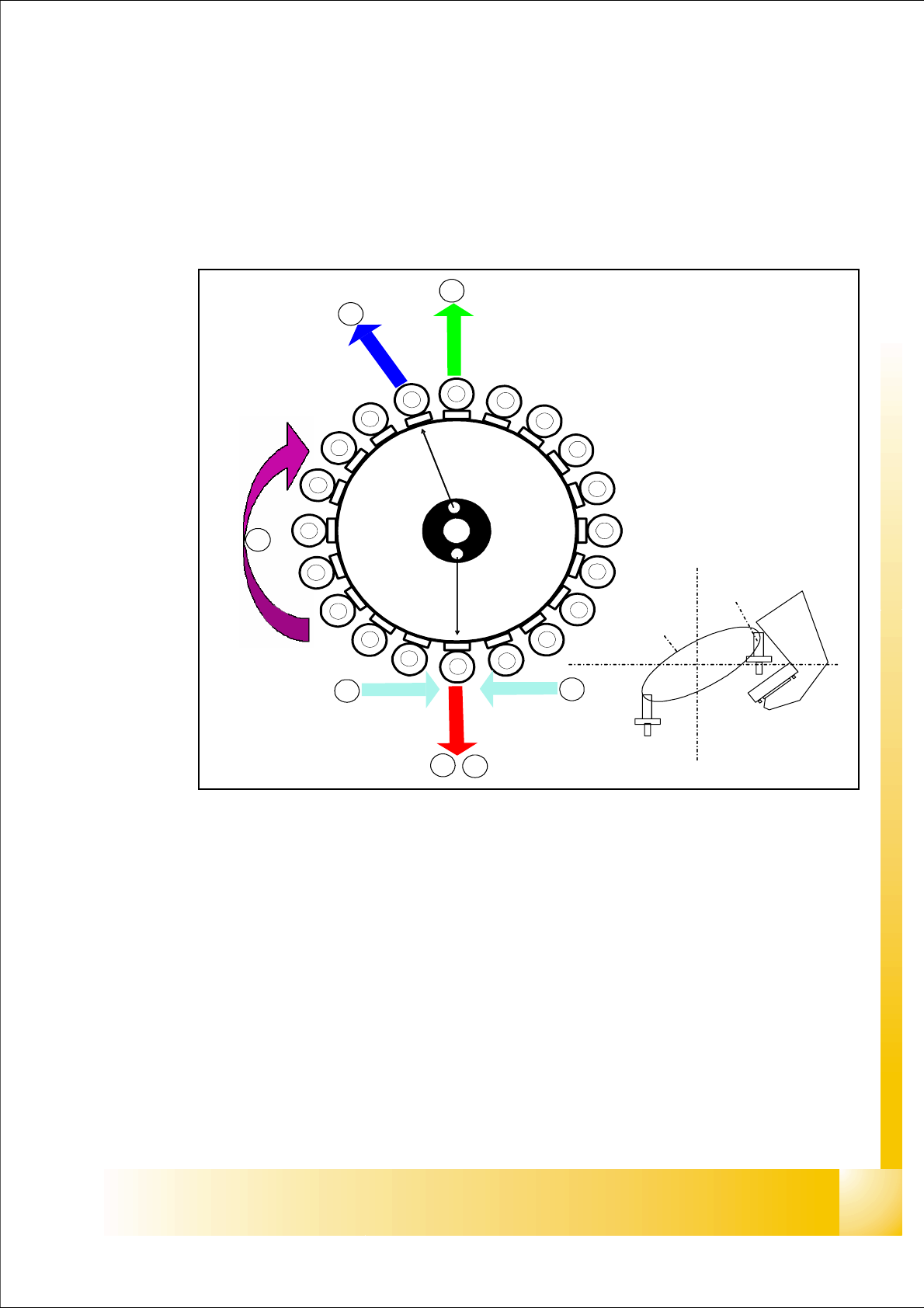
8.3.1 Working Positions at the Placement Head
Fig. 8.3 - 1 Working positions at the placement head
Key
(1) Optical centering (component camera)
(2) Vacuum measurement holding circuit
(3) Vacuum measurement placement circuit
(4) Pickup/placement station and reject position
(5) Position of component sensor
(6) Working direction
1
1
2
3
4
5
5
6
1
2
3
4
5
6
7
8
9
10
12
11
13
14
15
16
17
18
19
20
Segment 1
Segment 11
Co.-
Camera
S
t
a
r
p
o
s
i
t
i
o
n
,
6
16
1 - 30
Student Guide SIPLACE X
8 Collect&Place-Head 20 Edition 09/2005
30
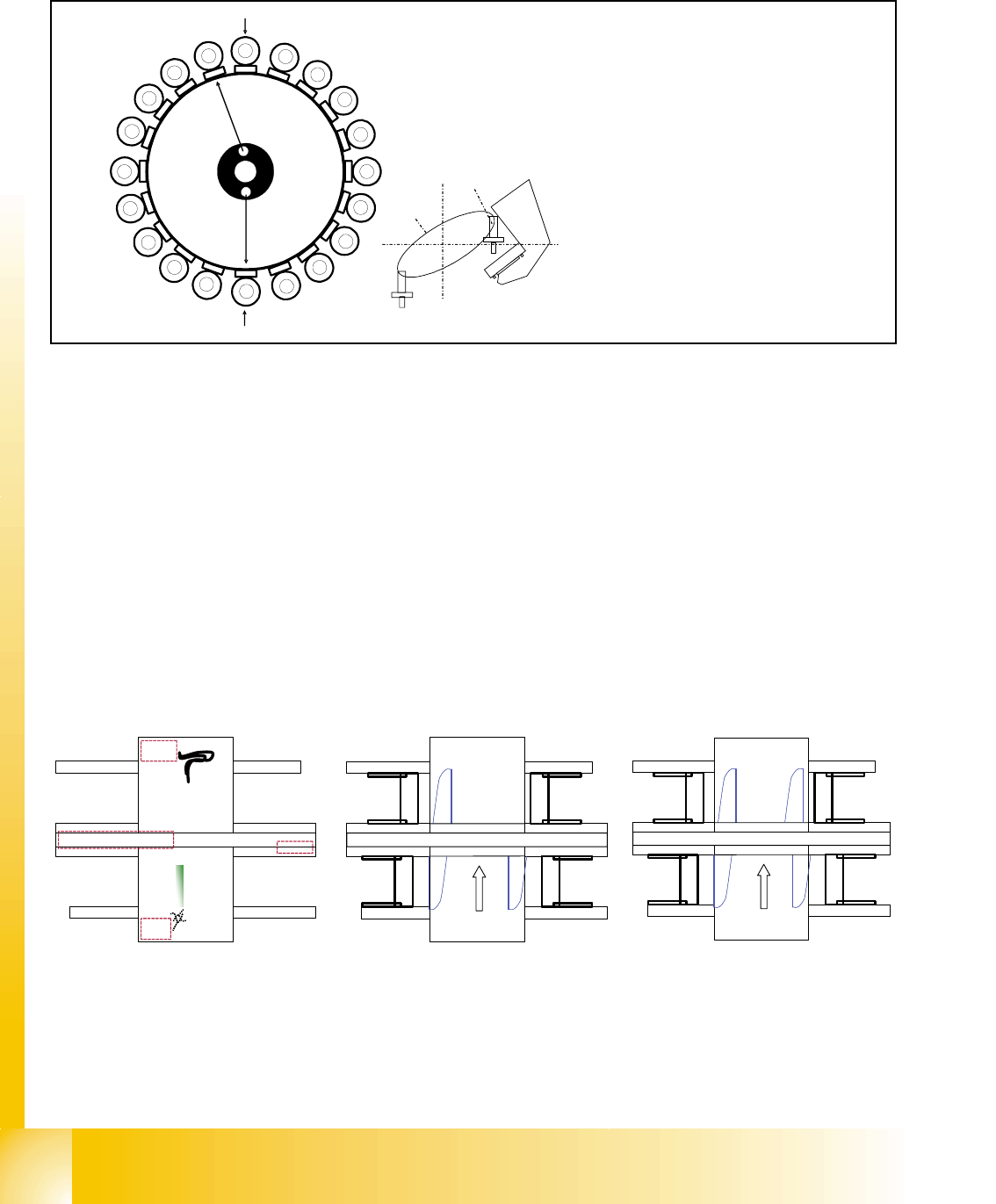
8.3.2 20 Nozzle Collect & Place Head in Home Position 0
°
Fig. 8.3 - 2 20 nozzle collect & place head in home position 0°
8.3.3 PCB position recognition and temperature compensation
The PCB recognition is necessary to determined the correct position of the PCB in the machine
(Transport --> Placement area).
It should be two fiducials on each PCB minimum. With this two fiducial we are able to determined
the X/Y position and the angle of the PCB in the transport. The fiducials shouldn‘t be in one line
on the PCB.
Up to 3 fiducials can program for the PCB recognition. With the third fiducial, we determined ad-
ditional to the position of the PCB the geometric data of the PCB layout, that means is the PCB
stretch.
The Siplace X machine increase the accuracy, so that we make additional to the PCB recognition
a temperature compensation with the second gantry in the placement area.
the
Star
axis
is
turned
to
home
position
Placement position
CO-
Camera position
1
2
3
4
5
6
7
8
9
10
12
11
13
14
15
16
17
18
19
20
Segment 1
Segment 11
S
t
a
r
p
o
s
i
t
i
o
n
CO- Camera
Star position
Digit: 10
Angle: 0°
1° is equivalent to 1000 digits
The Z-axis retract unit prevents seg-
ment 1 from falling.
TSP
30
1
Gantry 1
Gantry 3
Gantry 4
Siplace X 3
TSP
30
1
Gantry 1
Gantry 3
Gantry 4
Transport
direction
Siplace X 4
Gantry 2