N7201A587C.pdf - 第113页
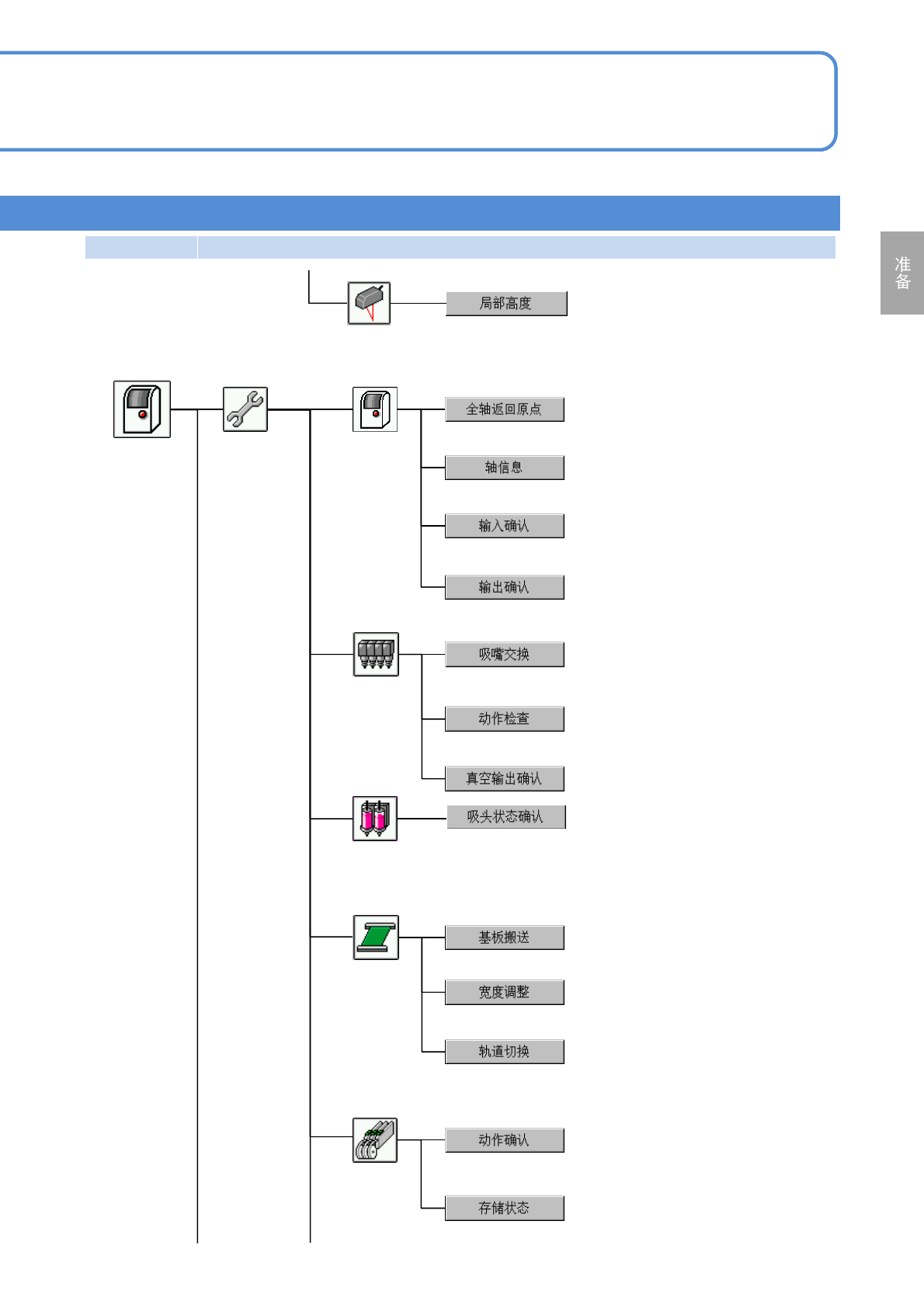
NPM-D3 EJM6DC-MB-02O-02 第 1 阶层 第 2 阶层 第 3 阶层 第 4 阶层 2-2-2 -12 输入的地址以 BIT( 比特 ) 单位显示。 输出的地址以 BIT( 比特 ) 单位显示。 全体 进行全轴的原点复位。 确认控制机器全轴的现在位置和状态 。 更换吸嘴。 贴装头 通过贴装头动作确认设备是否正常。 确认真空泵的状态,使各泵单独动作 。 调整 机器菜单 传送带 任意调整传送带宽度。 进行基板传送动作。 …
NPM-D3 EJM6DC-MB-02O-02
第1阶层 第2阶层 第3阶层 第4阶层
2-2-2-11
工程师模式 4
各部位
名称
菜单构成 6
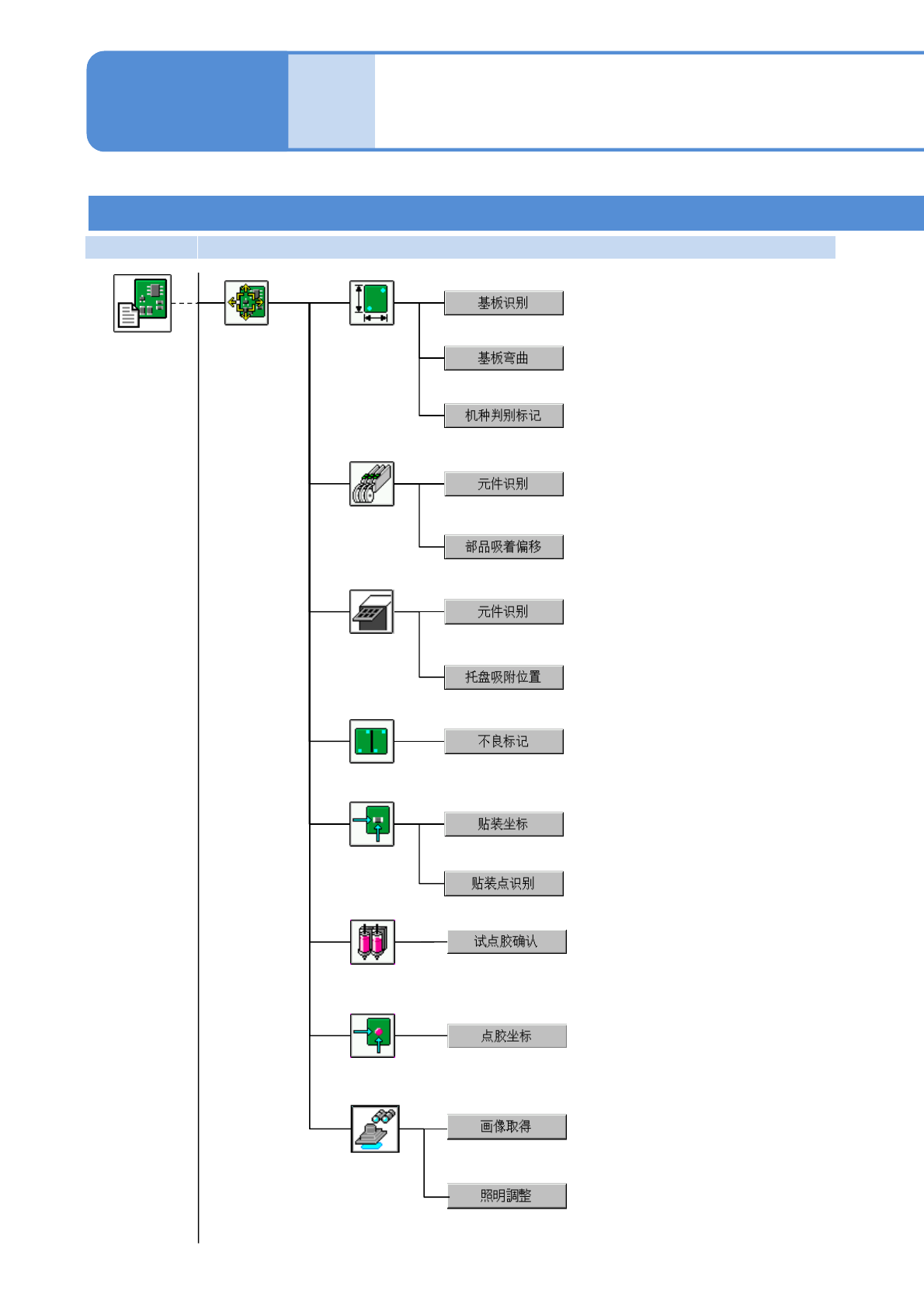
校正
基板
供料器
贴装
图案属性
托盘
确认基板识别动作,修改基板的识
别坐标。
确认元件识别动作,修改元件数据。
元件吸着位置动作,设定吸着偏移量。
元件吸着位置动作,
设定托盘吸着位置。
确认基板的贴装状态,确认为了修改
贴装偏移的条件。
确认不良标记识别动作,
修改不良标记坐标。
以贴装点单位选择条件贴装时
的贴装对象。
确认机种判别标记识别动作。
确认元件识别动作,修改元件数据。
确认基板弯曲动作,并修改测量点数
据。
生产数据
菜单
点胶
确认有关对点胶基板上的点胶状态及
点胶位置修改的条件。
试点胶
确认试点胶后的点胶状态
(包括粘着剂),同时进行数据的修改。
为了确保最适合检查的照明条件,确
认变换照明亮度后的图像。
检查
变更照明数值,看画面确认适合检查
的状态。
操作篇
2-2-2
NPM-D3 EJM6DC-MB-02O-02
第1阶层 第2阶层 第3阶层 第4阶层
2-2-2-12
输入的地址以BIT(比特)单位显示。
输出的地址以BIT(比特)单位显示。
全体
进行全轴的原点复位。
确认控制机器全轴的现在位置和状态。
更换吸嘴。
贴装头
通过贴装头动作确认设备是否正常。
确认真空泵的状态,使各泵单独动作。
调整
机器菜单
传送带
任意调整传送带宽度。
进行基板传送动作。
料架
确认设置在设备上的料架动作。
显示设置在设备上的料架信息。
切换调整轨道。
(只显示双轨)
确认温调单元(温度)和电控调节器
(压力)
点胶头
(点胶头)
修改局部高度测量动作下的测量坐标,
并确认基板状态。
局部高度
NPM-D3 EJM6DC-MB-02O-02
第1阶层 第2阶层 第3阶层 第4阶层
2-2-2-13
工程师模式 5
各部位
名称
菜单构成 7
调整
机器菜单
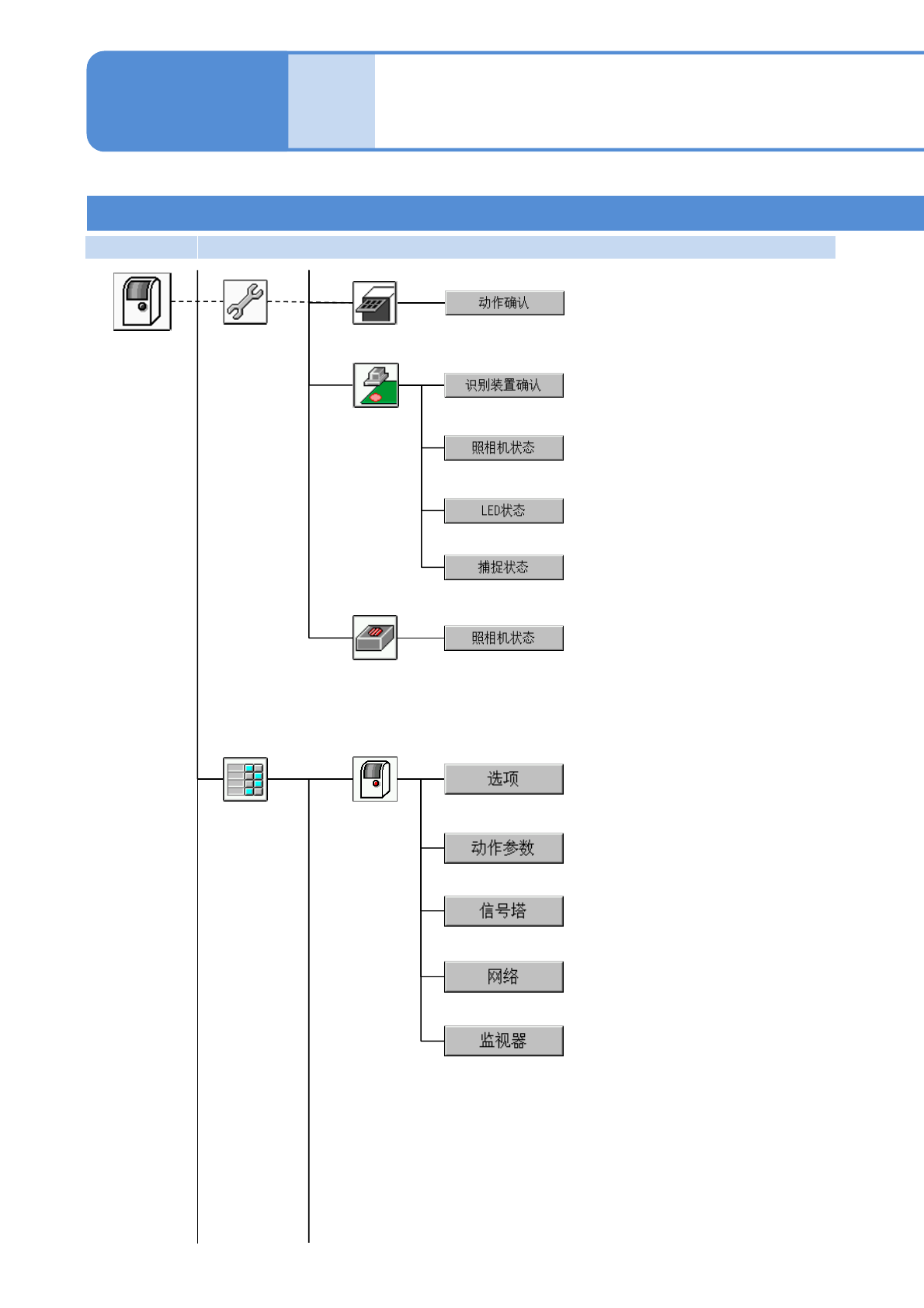
多功能识别照相机
显示多功能识别照相机的状态和各种信息。
确认所有的识别处理动作。
显示贴装头照相机的状态和各种信息。
显示LED照明的状态和各种信息。
显示贴装头照相机的截图状态和各种
信息。
贴装头照相机
设定和LNB的通信。
设定系统动作的全体条件。
设定指示灯和警报。
设定生产时和停止时的指示灯和警报。
设定监视器。
操作篇
2-2-2
全体
设定
确认托盘单元的动作。
托盘