N7201A587C.pdf - 第392页
NPM-D3 EJM6DC-MB-06O-02 数据 修改 对托盘信息的确认和修改方法进行说 明。 B C D E F G 托盘数据的修改 ( 托盘料架 ) A H A 元件信息 ( → P.6-1-8) B 托盘 托盘名称。 C 基本信息 ( → P.6-1-10 -2 ) 选择托盘板轴的移动速度。 D 托盘板轴速度 E 升降机轴速度 选择升降机轴的移动速度。 ●与 同样,选择设定值。 D F 托盘厚度 G 吸着高度 托盘 电子元件 …
NPM-D3 EJM6DC-MB-06O-02
指示灯值的偏移数据被初始化。
1
1
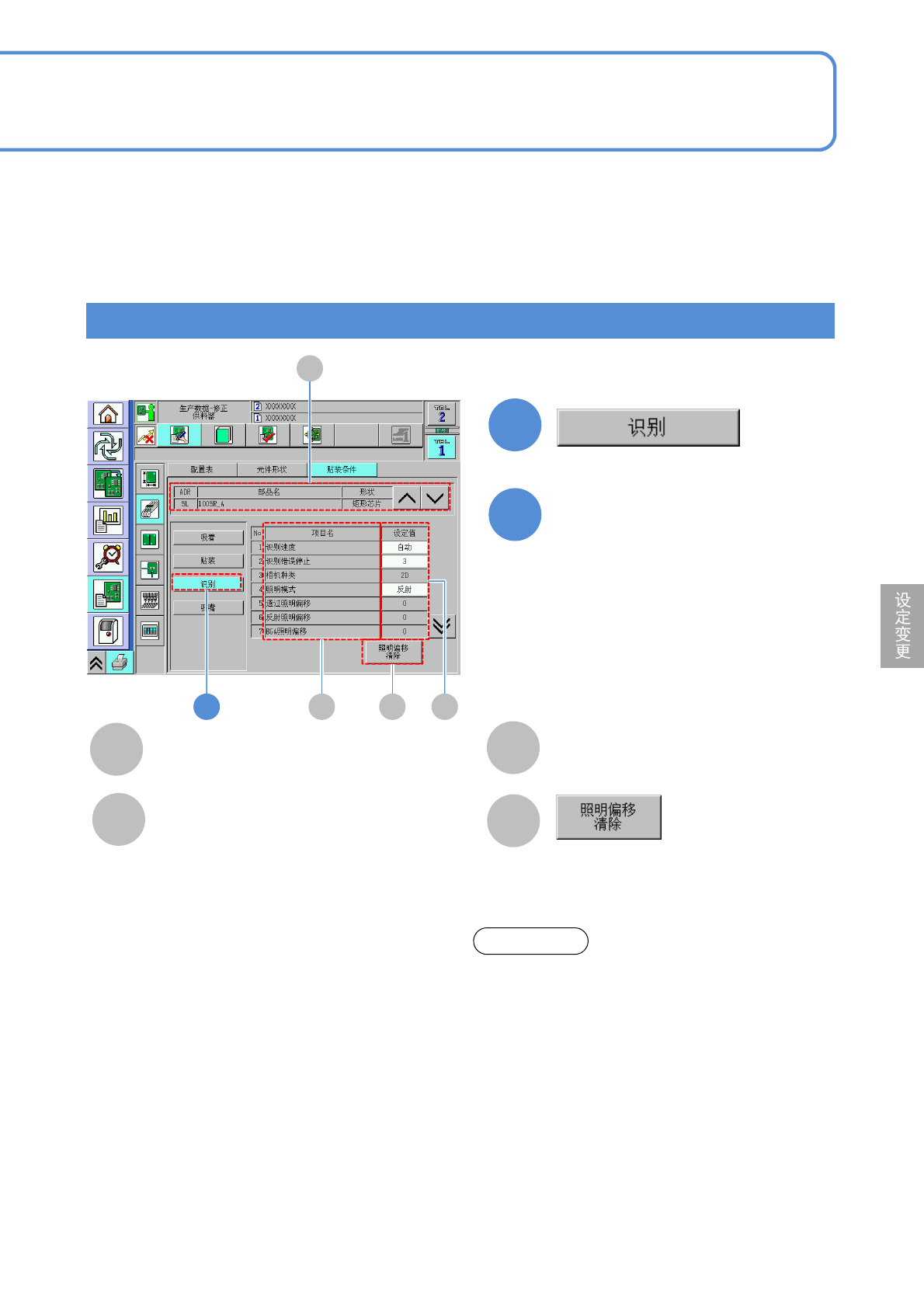
识别条件的确认和修改
B CD
C
B
项目名
设定值
各项目的贴装条件。
D
A
A
元件信息
(→ P.6-1-8)
修改画面上的数据
●轻触画面,显示输入画面。
2
6-1-9-2
识别速度:
・(自动/高速/中速/低速)
识别错误停止:
・(1次/3次)
相机种类:
・(2D/3D/3D(Multi))
照明模式:
・(透过/反射/BGA)
透过照明偏移:
・识别元件时的透过照明的偏移值
反射照明偏移:
・识别元件时的反射照明的偏移值
BGA照明偏移:
・识别元件时的BGA照明的偏移值
极性:
・元件极性的有无
元件周围附着物确认:
・当吸着2个元件时,即为识别错误。以此来防止剩余
元件掉落到基板上。
关于多功能识别照相机 [类型3 ] 的照明设定
1. 当反射照明亮灯时,不进行BGA的焊球高度检查。
2. BGA照明值将在内部自动转换。因此,在进行
BGA的焊球高度检查之际,有时会在识别画面上
显示与所设定值不同的值。
3.为了维持3D检查条件,识别系统有时会自动变更
照明值。
注意
NPM-D3 EJM6DC-MB-06O-02
数据
修改
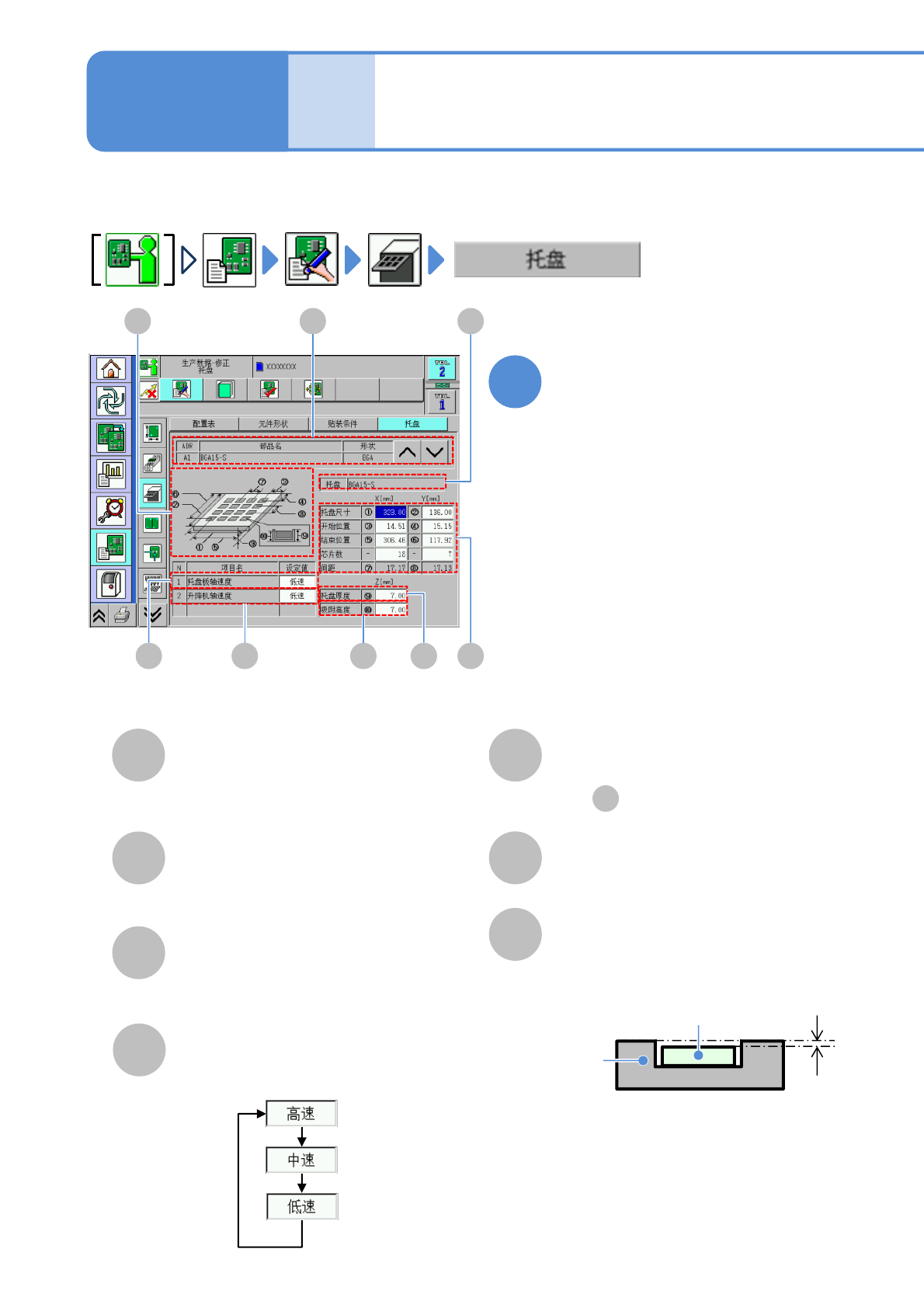
对托盘信息的确认和修改方法进行说明。
B
CD E F G
托盘数据的修改
(托盘料架)
AH
A
元件信息
(→P.6-1-8)
B
托盘
托盘名称。
C
基本信息
(→P.6-1-10-2)
选择托盘板轴的移动速度。
D
托盘板轴速度
E
升降机轴速度
选择升降机轴的移动速度。
●与 同样,选择设定值。
D
F
托盘厚度
G
吸着高度
托盘
电子元件
吸着的高度
输入吸着的高度。
修改画面上的数据
●轻触画面,显示输入画面。
1
操作篇
6-1-10
6-1-10-1
NPM-D3 EJM6DC-MB-06O-02
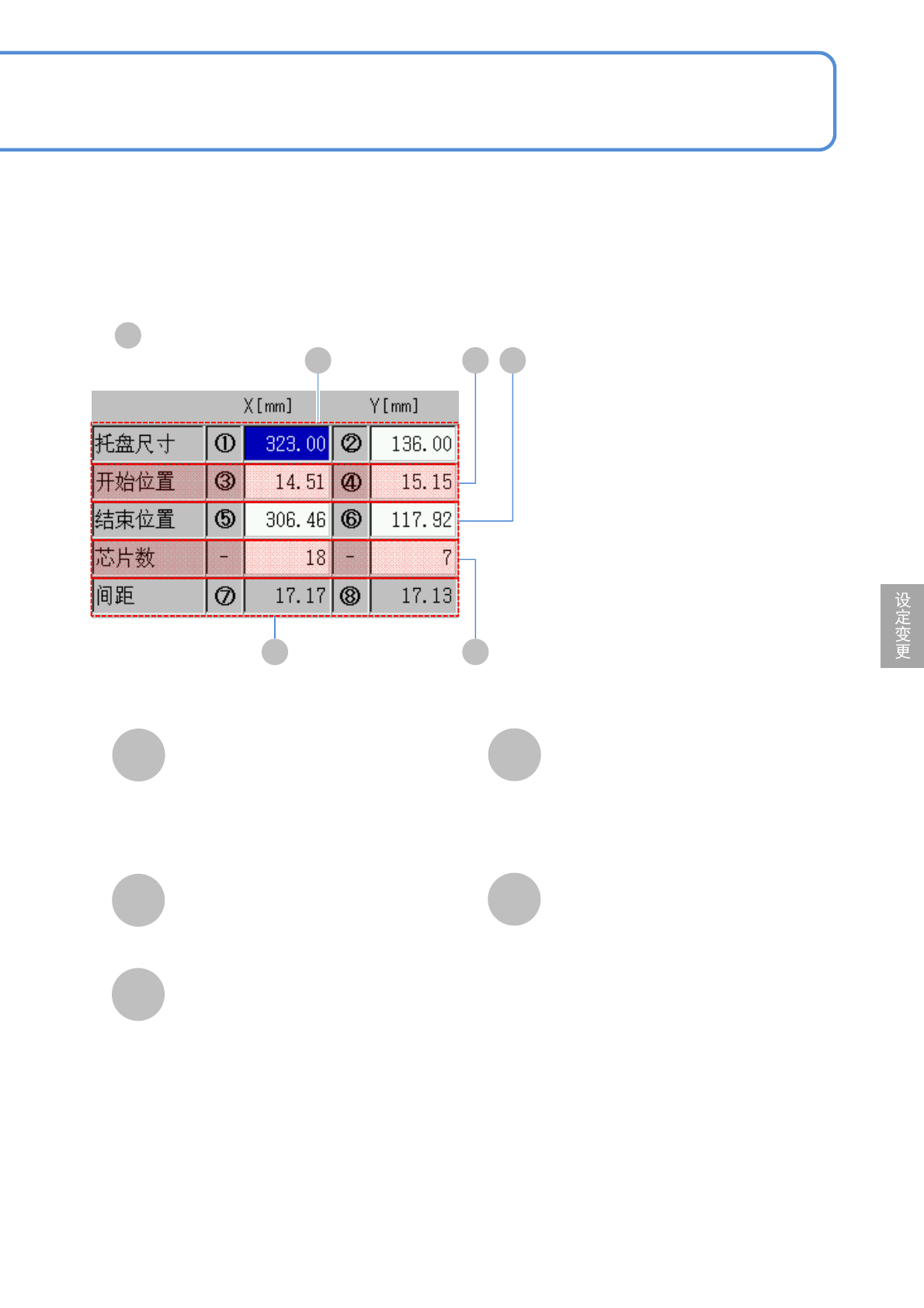
托盘尺寸
H
开始位置
芯片数
间距
■ 扩大图
C
KL
H I J
输入托盘的外形尺寸。
X: 较长边的尺寸。
Y: 较短边的尺寸。
I
第1吸着点的坐标。
J
结束位置
最终吸着点的坐标。
K
X: 收纳在较长边的元件数量。
: 收纳在较短边的元件数量。
●单位: 个。
L
元件之间的间距。
6-1-10-2