N7201A587C.pdf - 第669页
NPM-D3 EJM6DC-MB-09O-02 9-1-1 -8 ■ 3D 测量功能 ( 多功能识别照相机 : 【类型 3 】 ) 可高速检测 QFP / SOP 等全 部引线的共面性与 XY 方向位置。 可进行 BGA / CSP 等的全部引线的有无、缺欠检测。 识别方法 识别速度 对象元件例 最小引线 / 最小焊球间距 最小引线宽度 / 最小焊球直径 最小焊球高度 整体识别 3D 高速 QFP 、 SOP 0.4 mm *1) 0.…
NPM-D3 EJM6DC-MB-09O-02
规格
设备规格/基本性能 4
9-1-1-7
操作篇
9-1-1
识别单元的构成 2
连接器识别条件 ( 类型1 )
能够进行贴装的连接器的一般条件如下所示
*1)
。
8吸嘴贴装头 2吸嘴贴装头
外形尺寸 32 × 32 mm 以下 L 100 × W 90 mm 以下
*2)
引线间距 0.5 mm 以上
引线宽度 0.2 mm 以上
引线形状 从机身部分起的引线突出量需要在1mm以上。
其他形状
在垂直方向需要没有连接器销的布线贯通孔。
连接器销没有朝下方露出。
供给形态: 编带、托盘、棒状
*1) 基本上通过样品来研讨可否贴装,并通过实验进行可否判断。
*2) 贴装大型连接器时,有时存在其他的因吸着位置与识别范围关系所致的尺寸限制。详细内容,烦请您咨询。
NPM-D3 EJM6DC-MB-09O-02
9-1-1-8
■3D测量功能 ( 多功能识别照相机:【类型3 】)
可高速检测QFP / SOP 等全部引线的共面性与XY方向位置。
可进行BGA / CSP 等的全部引线的有无、缺欠检测。
识别方法 识别速度 对象元件例
最小引线/
最小焊球间距
最小引线宽度/
最小焊球直径
最小焊球高度
整体识别 3D高速
QFP、SOP
0.4 mm
*1)
0.12 mm ―
BGA、CSP
0.5 mm
*2)
0.3 mm 0.25 mm
*1) 关于引线间距不足 0.4mm 的 QFP/ SOP,请另行商洽。
*2) 关于焊球间距不足 0.5mm 的 CSP,请另行商洽。
QFP识别条件 ( 类型3 )
能够进行贴装的 QFP 的条件如下所述
*1)
。
8吸嘴贴装头 2吸嘴贴装头
外形尺寸 2 × 2 ~ 32 × 32 mm 2 × 2 ~ 45 × 45 mm
厚度 1.0 ~ 12 mm 1.0 ~ 28 mm
引线间距 0.4 mm、0.5 mm、0.65 mm、1.0 mm、1.27 mm、1.5 mm
引线宽度 0.2 mm以上
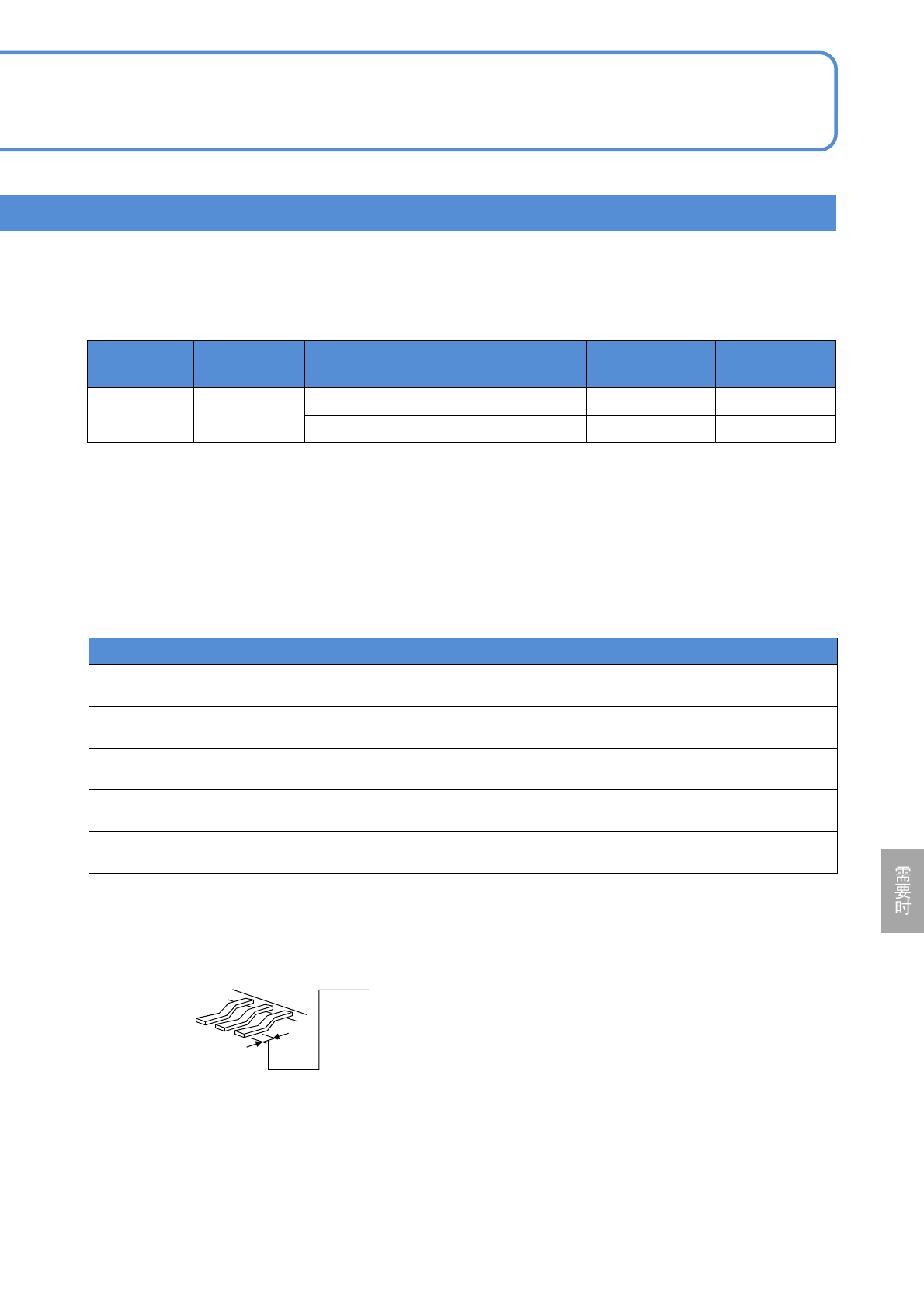
引线形状 从铸模部分起的引线突出量需要在1mm以上。
供给形态: 编带、托盘
・引线共面性的测量范围为±0.5mm。
・引线下面的平面部需要在0.2mm 以上。
・根据识别速度、引线数量的不同,在贴装时有时会产生识别处理的等待时间。
*1)基本上通过样品来研讨可否贴装,并通过实验进行可否判断。
●详细内容,烦请您咨询。
下面平面部在 0.2 mm以上
NPM-D3 EJM6DC-MB-09O-02
规格
设备规格/基本性能 5
9-1-1-9
操作篇
9-1-1
识别单元的构成 3
BGA / CSP识别条件 (类型3 )
能够进行贴装的 BGA / CSP 的条件如下所示
*1)
。
8吸嘴贴装头 2吸嘴贴装头
外形尺寸 2 × 2 ~ 32 × 32 mm 2 × 2 ~ 45 × 45 mm
厚度 0.3 ~ 12 mm 0.3 ~ 28 mm
最小焊球间距
0.5 mm 0.4 mm
最小焊球直径
φ0.3 mm φ0.25 mm
焊球形状 球状
焊球材质 高温焊料、共晶焊料
焊球数 2 × 2 个~64 × 64 个
焊球排列 焊球的间距与尺寸需为均一。
*2)
供给形态: 编带、托盘
・根据焊球的表面形状,有时会发生无法识别的情形。
・供给形态以下侧为球状端子的编带或托盘为对象。
・根据识别速度、焊球数量,有时会在贴装时的识别处理上产生等待时间。
・当反射照明亮灯时或在设定反射照明补偿值时 ,不进行焊球高度检查。
*1) 基本上通过样品来研讨可否贴装,并通过实验进行可否判断。
*2) 关于焊球缺欠或格状图案,与BGA / CSP的相关标准JEDEC、EIAJ所规定的相同。
●详细内容,烦请您咨询。