XP Type II 工程师培训手册 (2.0).pdf.pdf - 第84页
FK-9F98-34 XP T ype II Series T raining T ext for Service Engineers Edition 2.0 XP142E – Chapter 6 Proper Dat a Measurement s Page 25 of 30 9. The position of the XP indexing lever in the X direction should be such that …
FK-9F98-34 XP Type II Series Training Text for Service Engineers
Edition 2.0 XP142E – Chapter 6 Proper Data Measurements Page 24 of 30
6.20 Feeder Indexing
1. Equipment: feeder indexing lever height adjustment jig (Z9913AWPJ9310).
2. The following procedure is the same for both sides of the machine.
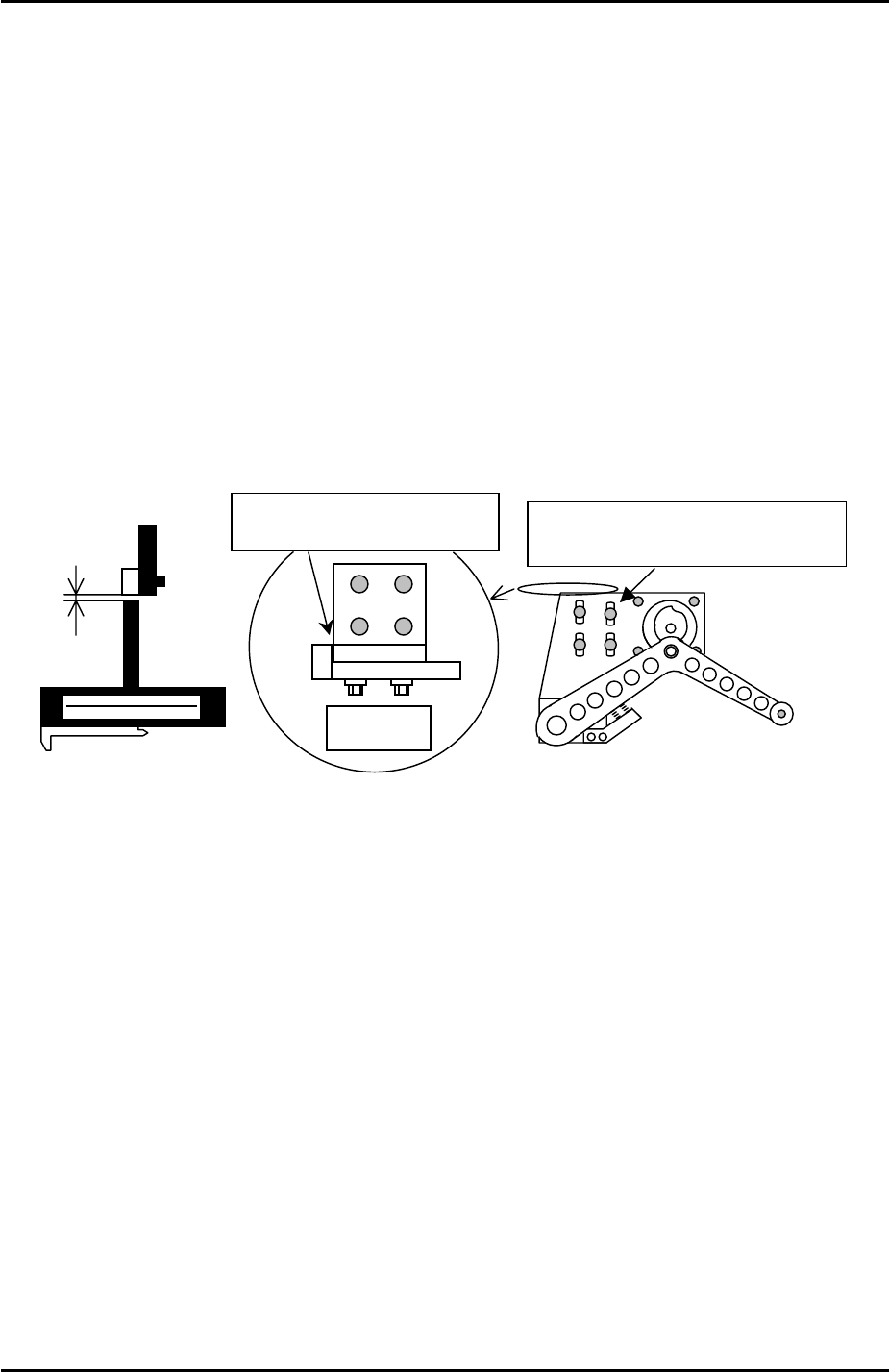
Feeder indexing lever height
1. Set the feeder indexing lever height adjustment jig at D25.
3. Return the F and G cams to their upper resting position (the origin position where the F
and G counter values are 0).
4. Bring the feeder indexing lever above the height adjustment jig.
5. Adjust the position of the feeder indexing lever bracket so that the clearance between the
lever and the jig is 0.5mm. Use a feeler gage to set the clearance. Refer to the diagram
below:
0.5mm
A
djust the feeder indexing lever
installation BKT by using these slots.
Top view
(Z9913AWPJ9310)
Make sure these two surfaces
are in contact.
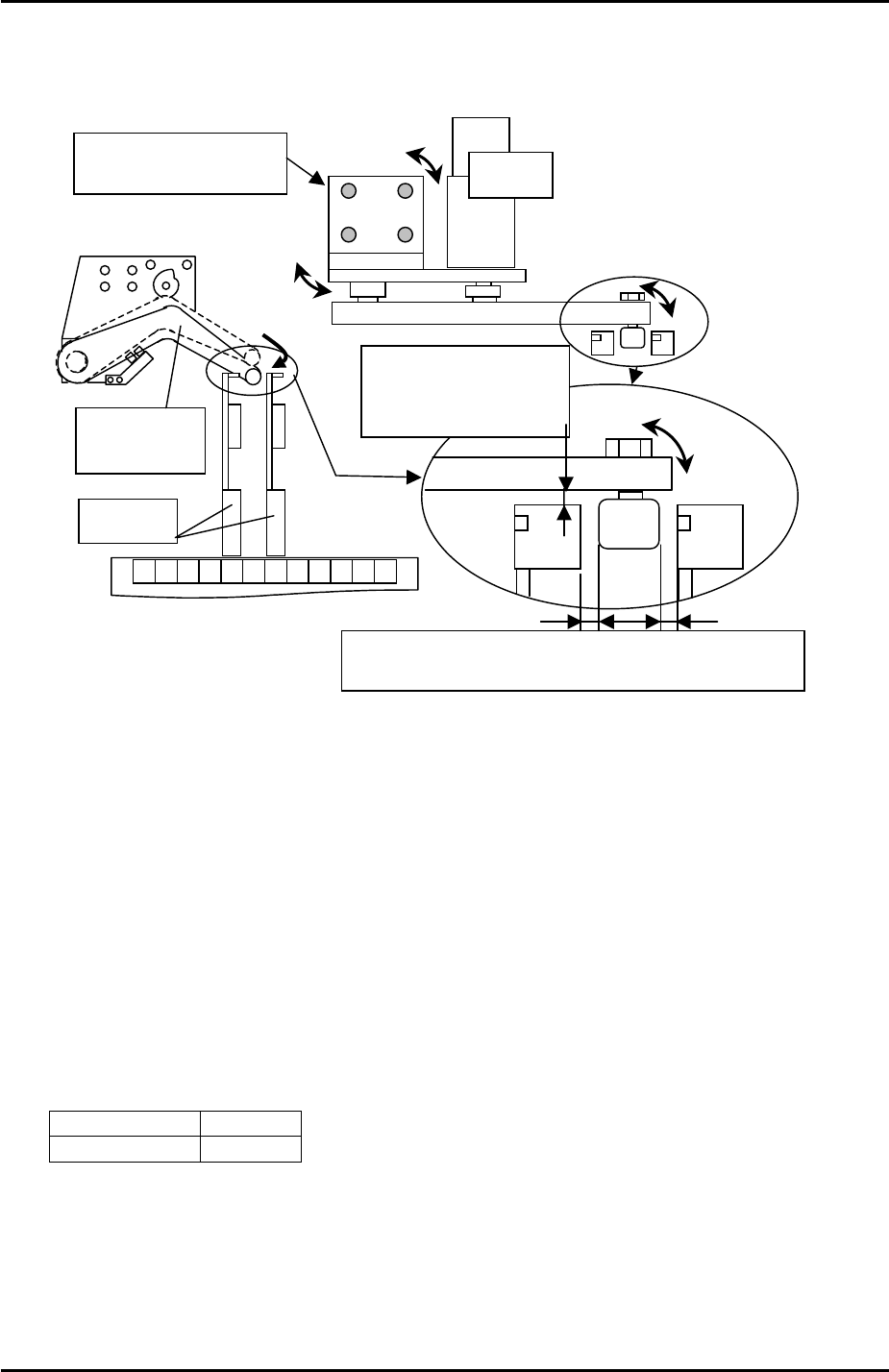
Feeder indexing lever X and Y position
1. Prepare two feeders and set them in D19 and D21 (side2 D79 and D81).
2. Select [Program] – [Editor] – [Part] – and select any part data file.
3. Select [Part Type Edit] – [Template] – and make sure the servo power is ON.
4. Specify [Slot] number 20 and then select [Manual Pickup] – [START] to move the head
and the indexing lever to D20.
5. Press the emergency stop button to cut the 200v power supply to the servos.
6. Push the placing head out of the way along the Y-axis but do not change the position of
the X-axis.
7. Manually descend the feeder indexing lever between the two feeders in slots D19 and
D21.
8. At this position the clearance between the tape feeder indexing arm and the XP indexing
lever should be 0.5 to 1.0mm in the Y direction. Refer to the diagram below and adjust if
necessary.
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
6 – 24 CS Section
FK-9F98-34 XP Type II Series Training Text for Service Engineers
Edition 2.0 XP142E – Chapter 6 Proper Data Measurements Page 25 of 30
9. The position of the XP indexing lever in the X direction should be such that when the
indexing lever is pressed down it is in the center of the two feeders on either side. Refer
to the diagram below and adjust if necessary.
19 21 20 22 18
Feeder
Feeder
index lever
The clearance between
lever and feeder:
0.5mm~1.0mm
Motor
A
djust the motor BKT
for positioning
Adjust to have even clearance between the cam followe
r
and feeder when lowerin
g
the index lever.
10. After any adjustments confirm that the feeder indexing lever height is still 0.5mm (see the
first part of 6.17 “feeder indexing lever height”).
11. Finally select [Maintenance C] – [Proper Data Editor] – [Machine Origin] – and confirm
that the value entered for [F_DownPoint] and [G_DownPoint] is –8.5mm.
6.21 Retract Position
1. The retract position ensures the placing head is not in a position that would cause
interference when clamping or unclamping an MFU from the machine.
2. Select [Maintenance C] – [Proper Data Editor] – [Machine Origin] – and check that the
following proper data is input:
X_Table Org 5mm
Y_Table Org 400mm
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
6 – 25 CS Section
FK-9F98-34 XP Type II Series Training Text for Service Engineers
Edition 2.0 XP142E – Chapter 6 Proper Data Measurements Page 26 of 30
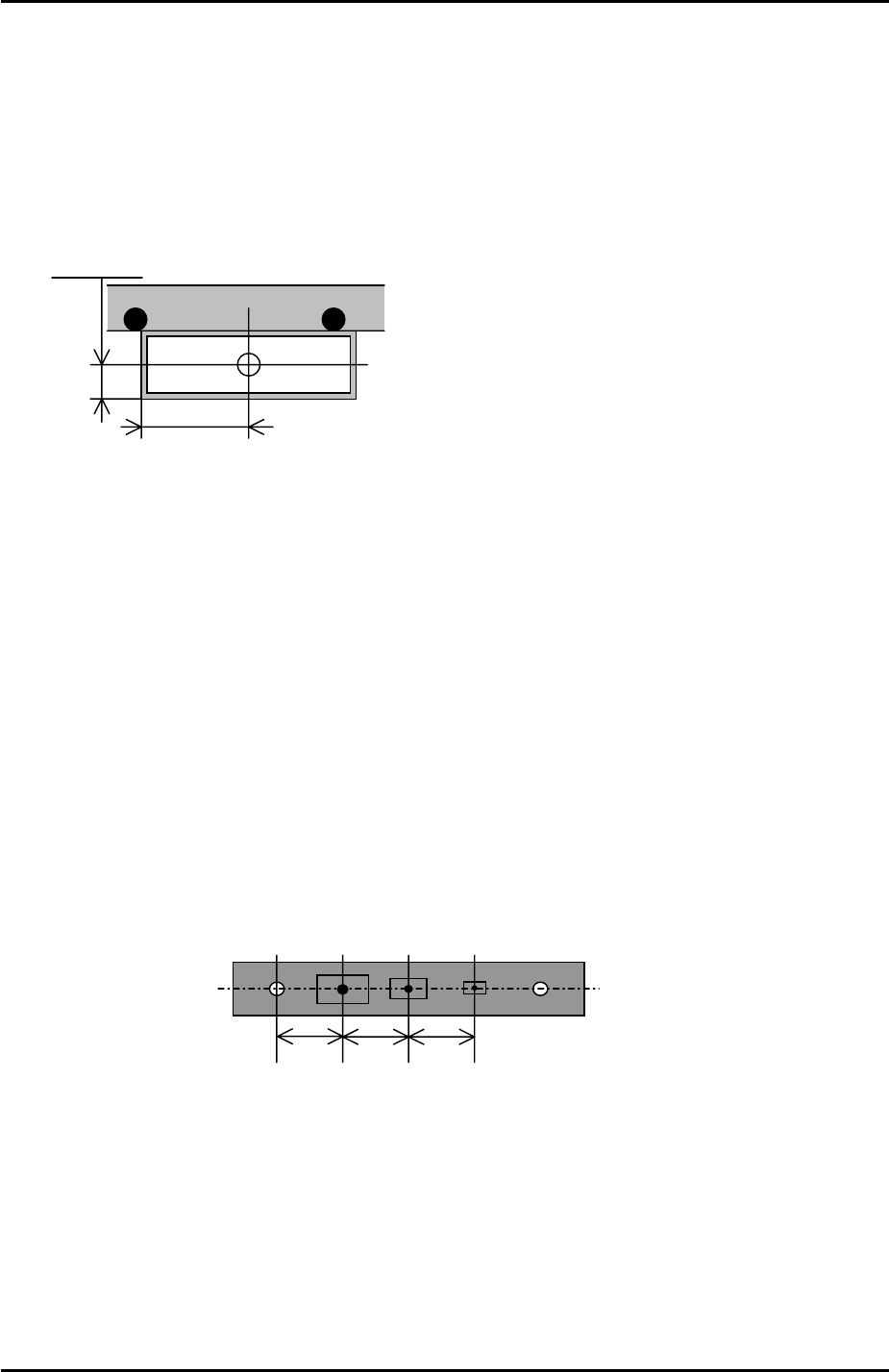
6.22 Parts Reject Position
1. Select [Maintenance A] – [Jog] – [Fiducial Camera] and display the cross hairs on the
screen.
2. Jog the fiducial camera until it is in the center of the parts reject box. Refer to the
diagram below for the dimensions of the box:
12.5mm
35mm
3. Select [Maintenance C] – [Proper Data Editor] – [Dispose Position] –
[X_Disposal1/Y_Disposal1] – [Direct Servo Input] to save the current X-axis and Y-axis
positions in proper data.
6.23 Parts Gage Pickup Positions
1. Equipment: nozzle jig (A5706ASEAJ8100). Lever type dial gage (0.01mm).
2. Select [Maintenance A] – [Jog] – [Fiducial Camera] and display the cross hairs.
3. Carefully remove the three ceramic parts gages from the parts gage station so that the
parts gage indents and vacuum holes are visible.
4. Center the cross hairs on the parts gage 1 vacuum hole and select [Maintenance C] –
[Proper Data Editor] – [Jig Position] – [Y_JigPickPos] – [Direct Servo Input] and
[X_JigPickPos1] – [Direct Servo Input] to save the current X and Y axis counter values to
proper data.
2 3
A
1
10 10 10
5. Return to the jog screen and center the cross hairs on the parts gage 2 vacuum hole and
select [X_JigPickPos2] – [Direct Servo Input] to save the current X axis counter value to
proper data.
6. Return to the jog screen and center the cross hairs on the parts gage 3 vacuum hole and
select [X_JigPickPos3] – [Direct Servo Input] to save the current X-axis counter value to
proper data.
7. Insert the nozzle jig in nozzle piston no.1 and replace the no.1 parts gage in the parts
gage station.
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
6 – 26 CS Section