00197498-03_UM_SiplaceCA-Serie_EN.pdf - 第150页
3 Technical Data User Manual SIPLACE CA-Series 3.7 Placement Heads From software version SC.708.0 Edition 12/2014 EN -DR AFT 150 Component Camera (item. 1 in fig. 3.7 - 2 ) 3 The component camera is fitted to the placeme…

User Manual SIPLACE CA-Series 3 Technical Data
From software version SC.708.0 Edition 12/2014 EN -DRAFT 3.7 Placement Heads
149
DP axis (item 1 in fig. 3.7 - 1) 3
The DP axis rotates the component into the required placement position, before it is centered
(item 11 in fig. 3.7 - 3
). While the component camera is recording the image, the component must
be absolutely stationary, i.e. there must be no control movements of the DP drive. Once the cor-
rection values have been determined, the DP drive turns the component into the definitive place-
ment position.
Every DP drive has its own DP motor, i.e. the nozzles can be rotated independently of one another.
The DP motor is position-controlled. Position encoders determine the actual values for the axis
motions at the axis card. The actual values are analyzed on the axis card. The position control on
the axis card provides the nominal current and voltage values for the servo amplifier used to op-
erate the DP motors.
Vacuum System 3
The vacuum system consists of two vacuum circuits - the pickup/placement circuit and the holding
circuit. These two circuits are linked to one another at the star position "pick, place, reject" (item
1 in fig. 3.7 - 3
).
The vacuum for the pickup/placement circuit is generated by a vacuum nozzle. An integrated
pressure/vacuum sensor sends the pressure and vacuum values to the control system. This con-
trol circuit allows the circuit to switch quickly and smoothly between vacuum and air kiss. Rapid
evacuation of the circuit, in turn, leads to reliable component suction, and thus increases pickup
reliability. The quick formation of an air kiss pulse for placing the component on the board in-
creases the placement speed even further.
In the holding circuit, each segment is supplied with a vacuum by a separate vacuum nozzle. The
segments are disconnected from one another, and so cannot affect one another. Even if the leak
air is taken in at one or more segments, the other segments will not be affected and can continue
placement.
The current vacuum values for a segment in the holding circuit can be measured with or without
component at the star position "vacuum check" (item 10 in fig. 3.7 - 3
).
Component Sensor (item 5 in fig. 3.7 - 2) 3
The component sensor is positioned so that the components can be measured in the pick/place
position (item 1 in fig. 3.7 - 3
). Measurements at the tip of the nozzle can thus be carried out during
every Z axis movement. Differential measurements can be used to identify components missing
from the nozzles. The component height can also be detected.
3 Technical Data User Manual SIPLACE CA-Series
3.7 Placement Heads From software version SC.708.0 Edition 12/2014 EN -DRAFT
150
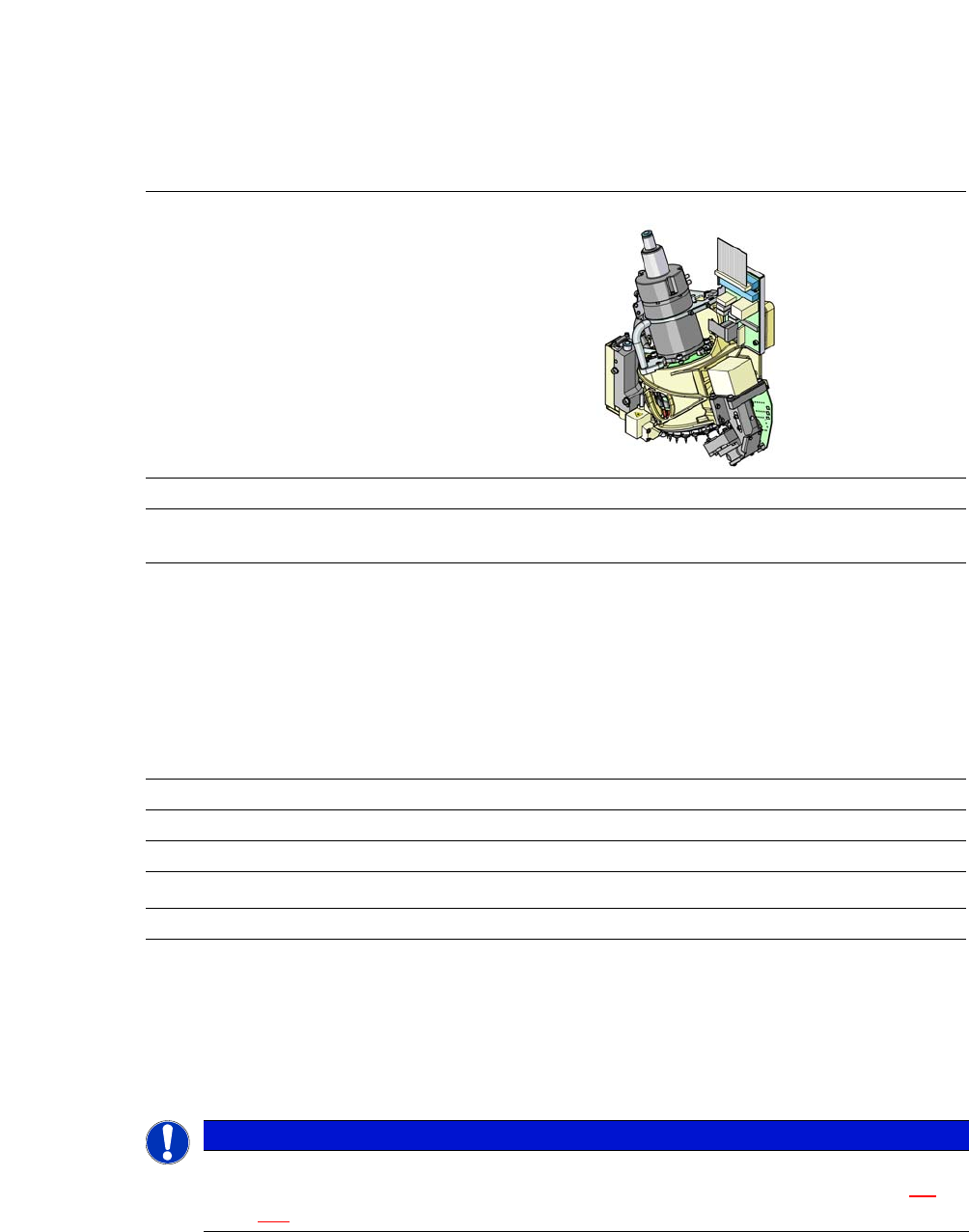
Component Camera (item. 1 in fig. 3.7 - 2) 3
The component camera is fitted to the placement head at star position 11 (item 11 in fig. 3.7 - 3).
It uses a digital interface (hotlink) to exchange data with the vision processor in the axis unit. The
camera is designed to capture the component from underneath. If a component drops onto the
camera, it is removed from the camera field via a removal ramp.
Intermediate Distributor (item 2 in fig. 3.7 - 2) 3
The adapter board is the interface between placement head and placement machine. The vacuum
sensor for the holding circuit is mounted on the star housing.
The following functions are implemented on the adapter board:
– Display the operating voltages at the head
– Display the sensor statuses
– Test access to the CAN bus for the placement head
– Test connector for the signals from the incremental encoder
– Test pins for the analog signals
– Control of the power supply for the incremental encoders for the star and Z drives
– SPI bus interface for the component sensor, the vacuum unit, the "Holding circuit" vac-
uum sensor and the EEPROM
– Signal processing for the output signal from the "Holding circuit" vacuum sensor
– Signal processing for the component sensor signal
– Signal processing for the "Z axis down" sensor
– Signal processing for the CAN bus for the placement head and the machine
– Control of return cylinder for the Z axis
User Manual SIPLACE CA-Series 3 Technical Data
From software version SC.708.0 Edition 12/2014 EN -DRAFT 3.7 Placement Heads
151
3.7.1.4 Technical Data
3
3.7.1.5 Sensor for the Component Reject Bin
3
SIPLACE SpeedStar (C&P 20 M)
with component camera type 41
Component range
*a
*)a Please note that the placeable component range is also affected by the pad geometry, the customer-specific
standards, the component packaging tolerances and the component tolerances.
03015 to 2220, Melf, SOT, SOD,
Bare-Die, Flip-Chip
Component spec.
Max. height
Min. lead pitch
Min. lead width
Min. ball pitch
Min. ball diameter
Min. dimensions
Max. dimensions
Max. weight
4 mm
0.08 mm
0.03 mm
0.10 mm
0.05 mm
0.3 mm x 0.15 mm
6 mm x 6 mm
1 g
Programmable set-down force 1.5 - 4.5 N
Nozzle types 10xx, 11xx, 12xx
X/Y accuracy (SMT) ± 20 µm / 3σ
X/Y accuracy (CA)
*b
*)b 10µm at 3
σ in placement process; Option eWLB on request.
± 10 µm / 3σ
Angular accuracy ± 0.2° / 3σ
PLEASE NOTE
When using a SIPLACE SpeedStar (C&P20 M) at a location without SWS, we recommend
that you install the optional sensor for the component reject bin. (See also section 8.2
,
page 473
)