00197498-03_UM_SiplaceCA-Serie_EN.pdf - 第155页
User Manual SIPLACE CA-Series 3 Technical Data From software version SC.708.0 Edition 12/20 14 EN -DRAFT 3.7 Placement Heads 155 3.7.2.1 Description The MultiS tar co mbines the two opposing char acte ristics of high pla…
3 Technical Data User Manual SIPLACE CA-Series
3.7 Placement Heads From software version SC.708.0 Edition 12/2014 EN -DRAFT
154
3
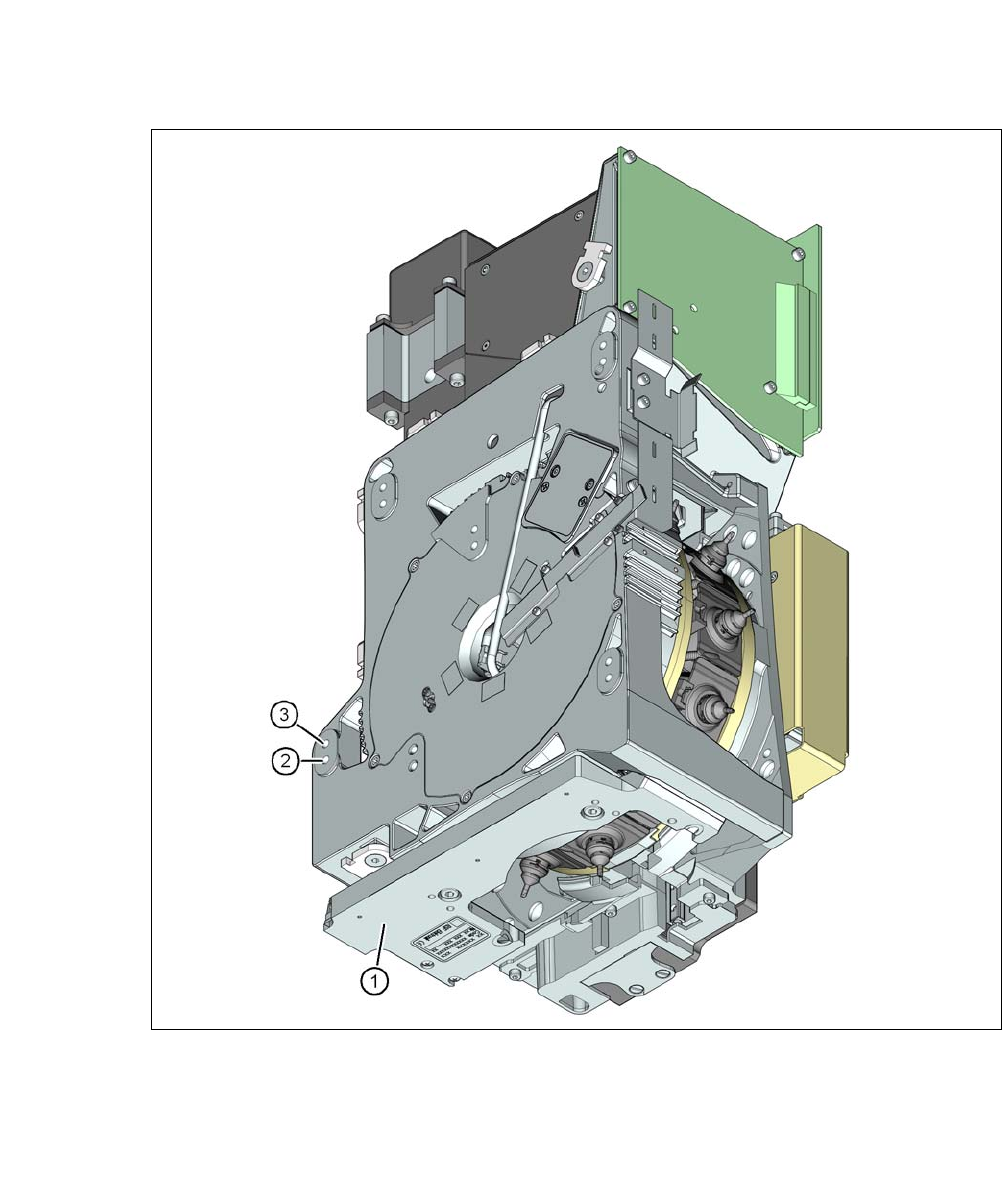
Fig. 3.7 - 6 SIPLACE MultiStar - back view, function groups part 3
(1) Component sensor
(2) Assembly position for component height of up to 11.5 mm
(3) Assembly position for component height of up to 6 mm

User Manual SIPLACE CA-Series 3 Technical Data
From software version SC.708.0 Edition 12/2014 EN -DRAFT 3.7 Placement Heads
155
3.7.2.1 Description
The MultiStar combines the two opposing characteristics of high placement performance and high
flexibility. When handling smaller components, up to 27 mm x 27 mm, the MultiStar uses the Col-
lect&Place method to ensure higher placement performance. In this case, the components are op-
tically centered with the integrated component camera. When handling larger components, up to
50 mm x 40 mm, the placement head uses the Pick&Place principle, in which the components are
optically centered with the stationary camera.
The combination of the two placement principles C&P and P&P gave the MultiStar its name. It is
also known as the CPP head.
The 12 segments of the CPP head are arranged in the shape of a star. A torque motor with high
torque rotates the star around the horizontal axis, the star axis.
Each segment has its own DP drive for rotating the nozzle. The nozzles are therefore no longer
rotated into the correct position at a single head station. They can be rotated into their placement
position at any time and independently of one another.
Each segment has a separate vacuum generator. This greatly reduces the time taken to switch
between vacuum and air blast. It also allows a vacuum check to be carried out in the holding circuit
for each individual nozzle.
The Z drive for the segments is implemented with a linear motor with linear path measuring sys-
tem, and is thus extremely precise. In the pick-up/placement position, the Z drive moves the seg-
ments up or down in the vertical direction.
As in the case of all other SIPLACE Collect&Place heads, the digital component camera is inte-
grated into the placement head. The abolition of additional travel paths for optical centering of the
components leads to a higher processing speed.
The component sensor on the underside of the placement head measures the components at
the pickup/placement position. Measurements can be performed at the nozzle tip for each move-
ment of the Z axis and an ascertainment made as to whether there is a component on the nozzle
and how high the component is.
3.7.2.2 Assembly Positions of SIPLACE MultiStar
The CPP head can be fitted to the head mount in two different positions:
– MultiStar in the top assembly position
In this position, all components can be processed up to a size of 50 mm x 40 mm² mm and a
height of 11.5 mm. 3
– MultiStar in the bottom assembly position
In this position, the CPP head places components up to a size of 27 mm x 27 mm and a com-
ponent height of 6 mm, using the Collect&Place method. 3
3 Technical Data User Manual SIPLACE CA-Series
3.7 Placement Heads From software version SC.708.0 Edition 12/2014 EN -DRAFT
156
Observe the following rules when defining the assembly position:
The head height must be the same for all heads in the same placement area.
Always install the CPP head in the top assembly position if it is to be combined with the fol-
lowing assemblies:
– Stationary component camera
– Matrix tray changer
– TwinStar
3.7.2.3 Classification of Component Range to be Processed
3
Component
class
Component
size
Assembly
position
*a
of CPP
head
Component
height
Component
camera type
Small compo-
nent
K_BE
01005 -
27 x 27 mm²
Top Up to 8.5 mm
Head camera,
type 30
Bottom Up to 6 mm
01005 -
16 x 16 mm²
Bottom Up to 6 mm
Head camera,
type 38
Medium sized
component, type
M_BE_1
< 27 x 27 mm²
Top
Between 8.5 and
11.5 mm
Stationary
component cam-
era,
type 33
(see section 6.7.1
,
page 410
)
Bottom Not possible
Medium sized
component, type
M_BE_2
Between
27 x 27 mm²
and 32 x 32 mm²
Top 11.5 mm
Bottom Not possible
Large compo-
nent
G_BE
Between 32
x 32 mm² and
50 x 40 mm²
Top Up to 11.5 mm Stationary compo-
nent camera,
type 33
Bottom Not possible
Tab. 3.7 - 1 Classification of component range to be processed
*)a Please observe the rules for assembly position heights in section 3.7.2.2
, page 155.