JUKI-RX-7使用说明书.pdf - 第296页
第 4 章 操作篇 4- 12. 零件编辑 4-12-7. 零件的吸附,安 装顺序画 面 可显示和编辑本 机零件资料库 中记录的零件数据之 吸附和安装顺 序信息。 项目名称 说明 吸嘴头类型选项 卡 可使用多 个类型的吸嘴头时, 选择要设定零 件信息的对象吸嘴头 类型。 装着运行 ID 显示表示 安装动作的 ID 编号。 顺序形式 指 定吸附时的动 作顺序。 • 正常 :通常动作,吸嘴下降的 同时打开带式 供料器(交叠动作) • 安全 …
第 4 章 操作篇
4-12.
零件编辑
4
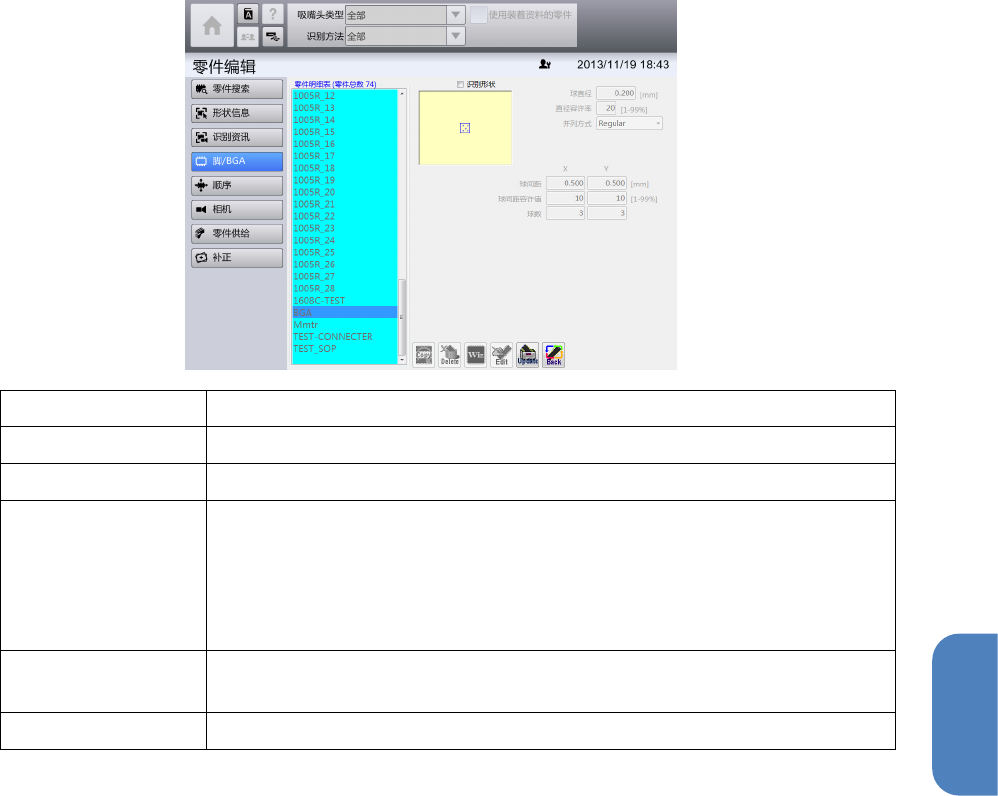
BGA 零件时
项目名称
说明
球直径 在 0.001mm~99.999mm 的范围内输入锡球的直径。
直径容许率 在 1%~99% 的范围内输入锡球的直径容许率。
并列方式 选择锡球配置的基本形状。
•
Regular:格子状配置
•
Checker:对号状配置(配置在角上)
•
R-Checker:对号状配置(角上不配置)
球间距 X /锡球间
距 Y
在 0.001mm~99.999mm 的范围内输入相邻锡球的间隔。
球数 X/球数 Y 在 1~100 的范围内输入锡球的可配置个数。
221
第 4 章 操作篇
4-12.
零件编辑
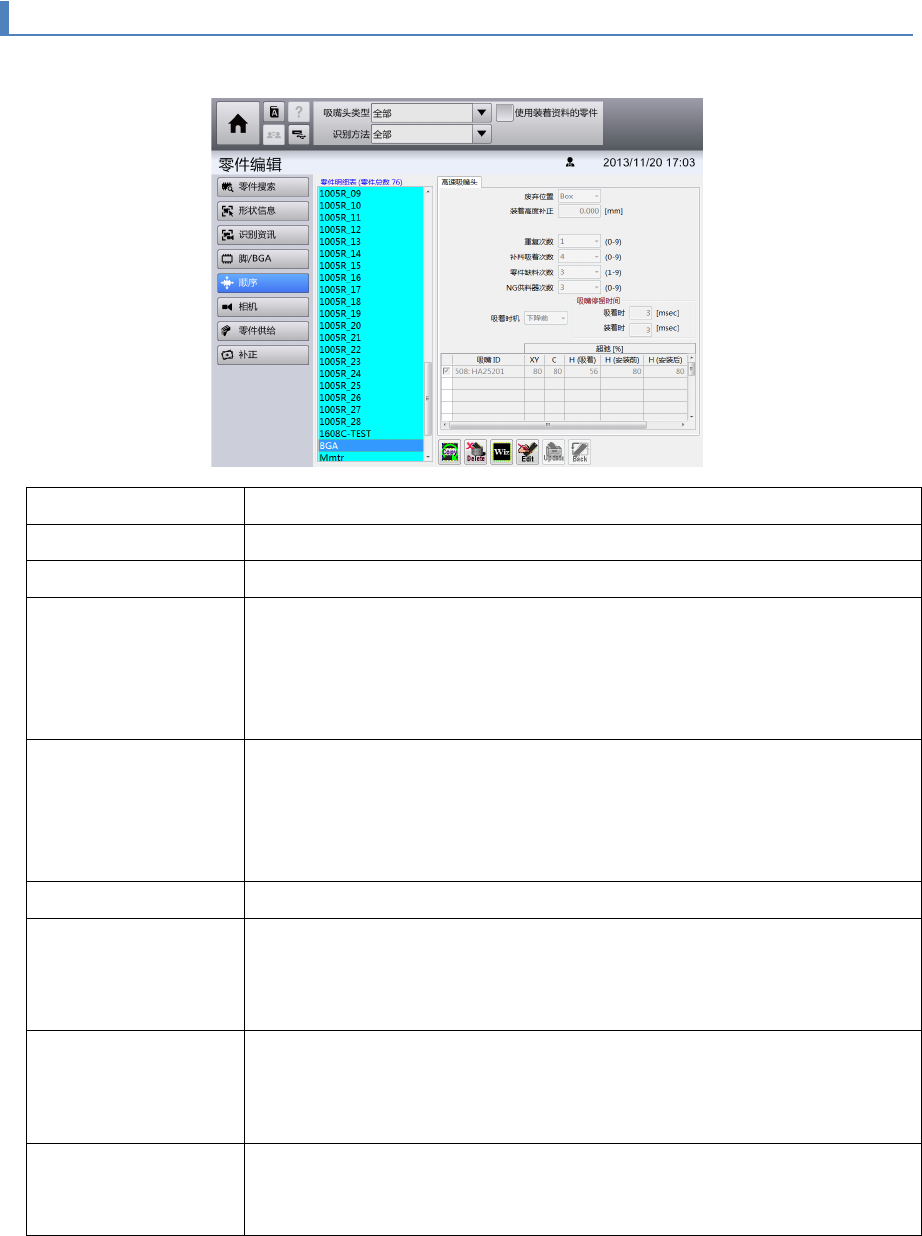
4-12-7. 零件的吸附,安装顺序画面
可显示和编辑本机零件资料库中记录的零件数据之吸附和安装顺序信息。
项目名称
说明
吸嘴头类型选项卡 可使用多个类型的吸嘴头时,选择要设定零件信息的对象吸嘴头类型。
装着运行 ID 显示表示安装动作的 ID 编号。
顺序形式 指定吸附时的动作顺序。
•
正常:通常动作,吸嘴下降的同时打开带式供料器(交叠动作)
•
安全:对高度较高的零件执行的安全动作,按遮蔽器打开,吸嘴下
降,吸附,吸嘴上升,遮蔽器关闭的顺序执行
吸着时机 选择吸附时真空阀动作的时间点。
•
下降前:吸附吸嘴下降前真空阀动作
•
下降后:吸附吸嘴下降后真空阀动作(仅在序列类型为[安全]时
有效)
装着高度补正 输入安装位置高度方向的偏移量。
精度水平 适用于安装时需要高定位精度的零件。
•
0:普通精度
•
1:高精度
废弃位置 指定零件的废弃位置。
•
Box:废弃到废弃箱
•
输送带:废弃到废弃输送带
补料吸着次数
连续发生未吸附或立式吸附时,在 0~9 的范围内指定发生错误之前的次
数。
未吸附时发生零件缺料错误,立式吸附时发生带式供料器不良错误。
222
第 4 章 操作篇
4-12.
零件编辑
4
项目名称
说明
重复次数 发生零件识别错误时,输入重新识别的次数。
重复指定次数后仍发生识别错误时,将废弃该零件,开始下一个零件的吸
附动作。
吸嘴停留时间
吸着时
输入吸嘴停在吸附位置(下降位置)上的时间,以便切实地进行吸附动
作。
吸嘴停留时间
装着时
(仅限多功能吸嘴
头)
输入吸嘴停在安装位置(下降位置)上的时间,以便切实地进行安装动
作。
吸嘴 ID 选择要使用的吸嘴 ID。
加速度模式 ID 选择要使用的加速度模式 ID。加速度模式依赖于机器数据。
全体超驰比率 输入整体的超驰率。
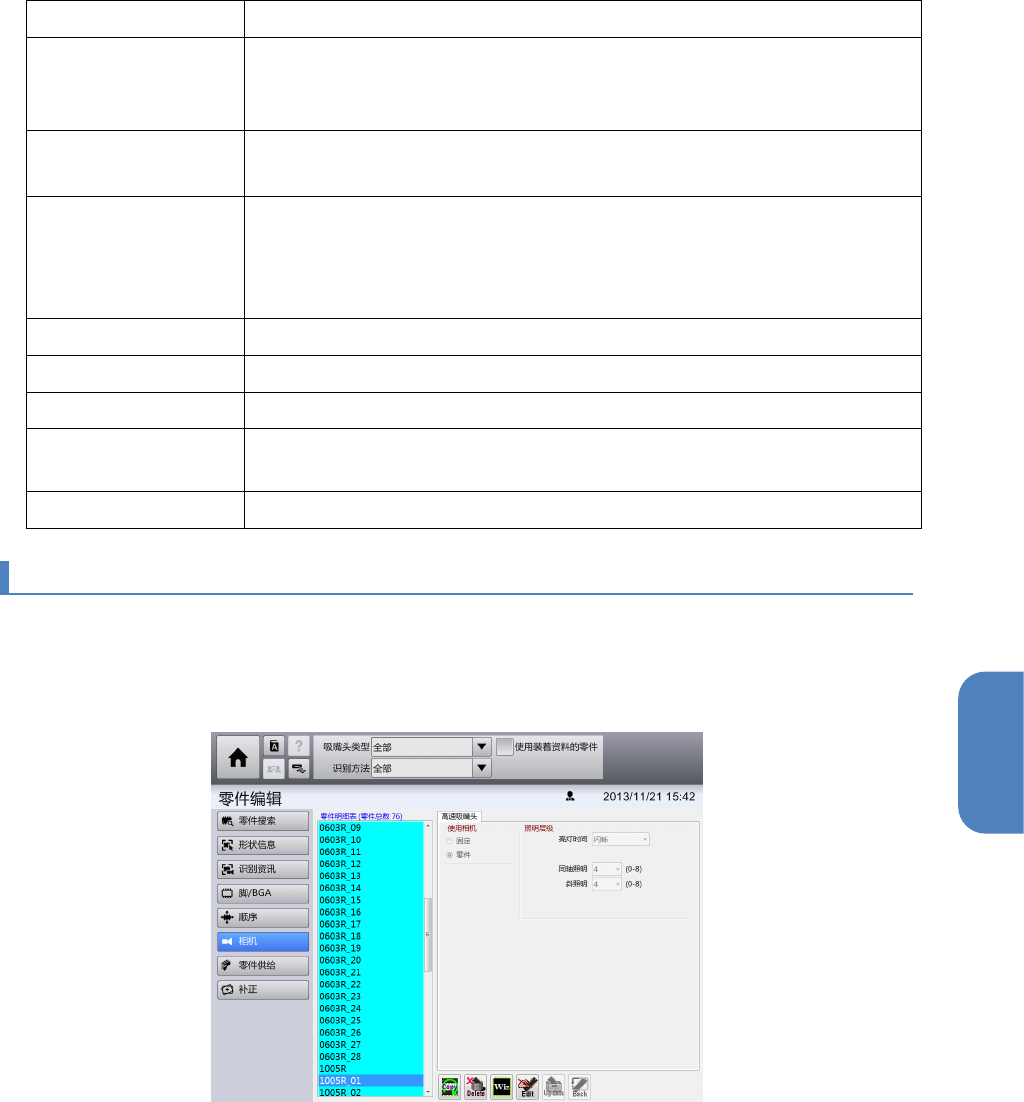
识别中心补正 X/识别
中心补正 Y
显示作为零件识别中心位置的偏移量值。
照明层级 选择照明的亮度级别。
4-12-8. 零件的识别相机信息画面
可显示和编辑本机零件资料库中记录的零件数据之识别参数。
在主菜单中按[零件编辑] - [相机]的顺序触摸后,将显示相机画面。
相机画面
相机画面中将显示相机数据及吸附确认方法。
223