JUKI-RX-7使用说明书.pdf - 第317页
第 4 章 操作篇 4- 13. 零件生成向导 4 名称 说明 在定位的过程中 使用 设定脚 设定是否排列引 脚集合。 通常为选中。但 以下情况下取 消选中。 • 发生识别错误。 • 引脚集合重叠。 • 主体内存在引脚 集合。 高精度模式 设定是否在高精 度模式下测量 引脚前端。 背面装着检出 吸附零件 时,设定是否检测零 件的背面安装 (上下反转吸附的状 态)。 • 检查内侧装着: 选中后,将检 测背面安装的零件。 • 正常吸附状态:…
第 4 章 操作篇
4-13.
零件生成向导
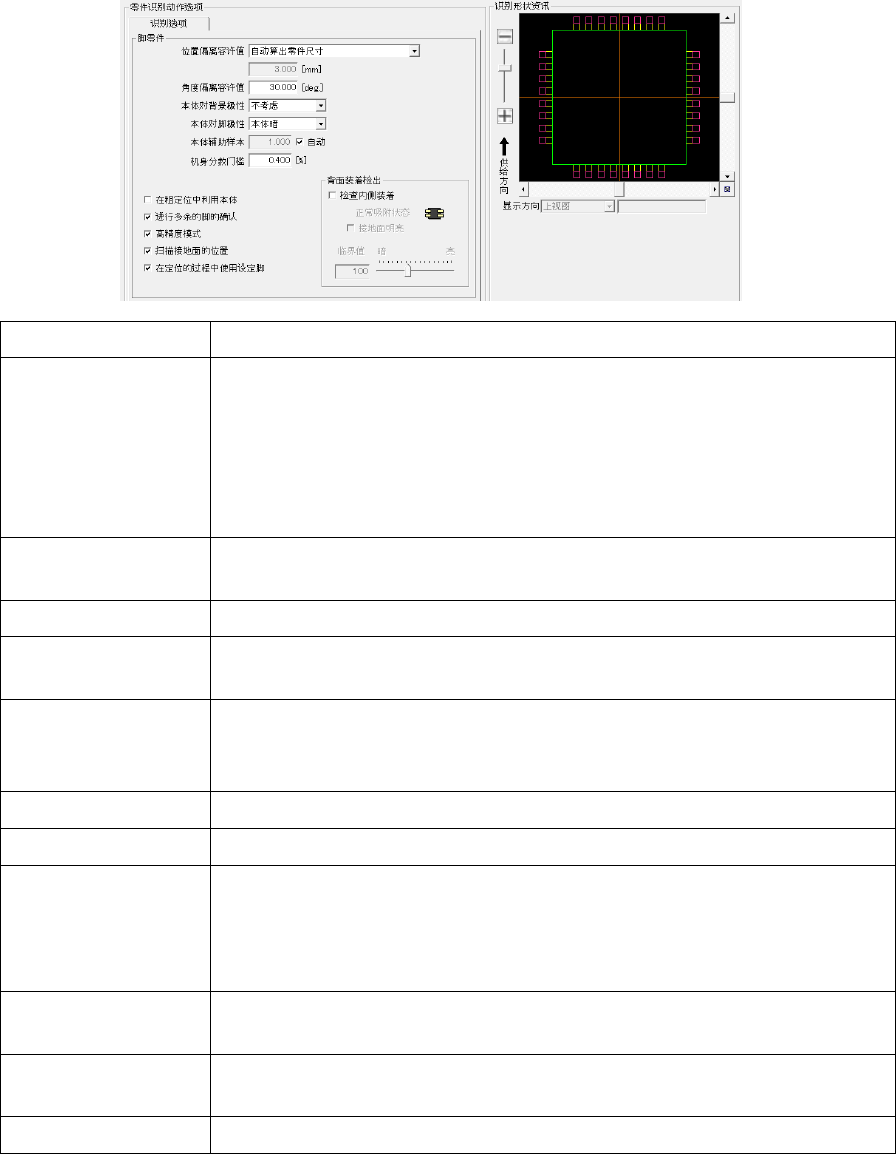
选择识别选项(引脚零件)
名称
说明
位置偏离容许值 识别零件时,从下拉列表中选择在哪个范围内进行识别。
•
全部画面:识别整个画面。
•
指定位置:在指定区域内识别。
•
自动算出零件尺寸:考虑角度,角度偏差的容许值,自动设定识别区
域后识别。
角度偏离容许值
识别得到的零件角度与预计零件所在的角度有偏差时,设定容许的角度偏差
量。
本体对背景极性 在下拉列表中设定零件主体和背景的亮度差。
本体对脚极性
在下拉列表中设定主体和引脚哪一个看起来比较亮。从[本体明],[本体
暗]中选择任一。
本体辅助样本 指定检测主体时使用的样品系数。
如果设定为 1,则使用所有像素识别主体,如果设定为 2,则从 2×2 的像
素中选择一个代表点来识别主体。
自动 自动计算合适的主体子样品时选中。
机身分数门槛 设定用于判断是否使用主体来定位的阈值。
在粗定位中利用本体 计算零件的大概位置时,选中后将使用主体信息计算。
拍摄到清晰的主体时,很容易用主体信息计算。
主体检测失败时,自动转移到利用引脚的定位处理。
如果是没有引脚的异形零件,因为无法利用引脚定位,所以务必选中。
检查脚缺损
检查引脚的缺损。在数据中有定义,但找不到引脚时,如果要将识别结果输
出为 NG 则选中。
进行多余的脚的确认
实际零件的引脚数比数据中的引脚数多时,如果要检测多余的引脚,并将识
别结果输出为 NG 则选中。
扫描接地面的位置 要确认检测到的引脚位置是否在零件数据中设定的位置时选中。
242
第 4 章 操作篇
4-13.
零件生成向导
4
名称
说明
在定位的过程中使用
设定脚
设定是否排列引脚集合。
通常为选中。但以下情况下取消选中。
•
发生识别错误。
•
引脚集合重叠。
•
主体内存在引脚集合。
高精度模式 设定是否在高精度模式下测量引脚前端。
背面装着检出 吸附零件时,设定是否检测零件的背面安装(上下反转吸附的状态)。
•
检查内侧装着:选中后,将检测背面安装的零件。
•
正常吸附状态:指定零件表面的亮度。零件表面在相机画面中较亮
时,选中[接地面明亮]。
•
临界值:输入亮度的阈值,以区分零件表面的状态。也可移动滚动条
来调整。
243
第 4 章 操作篇
4-13.
零件生成向导
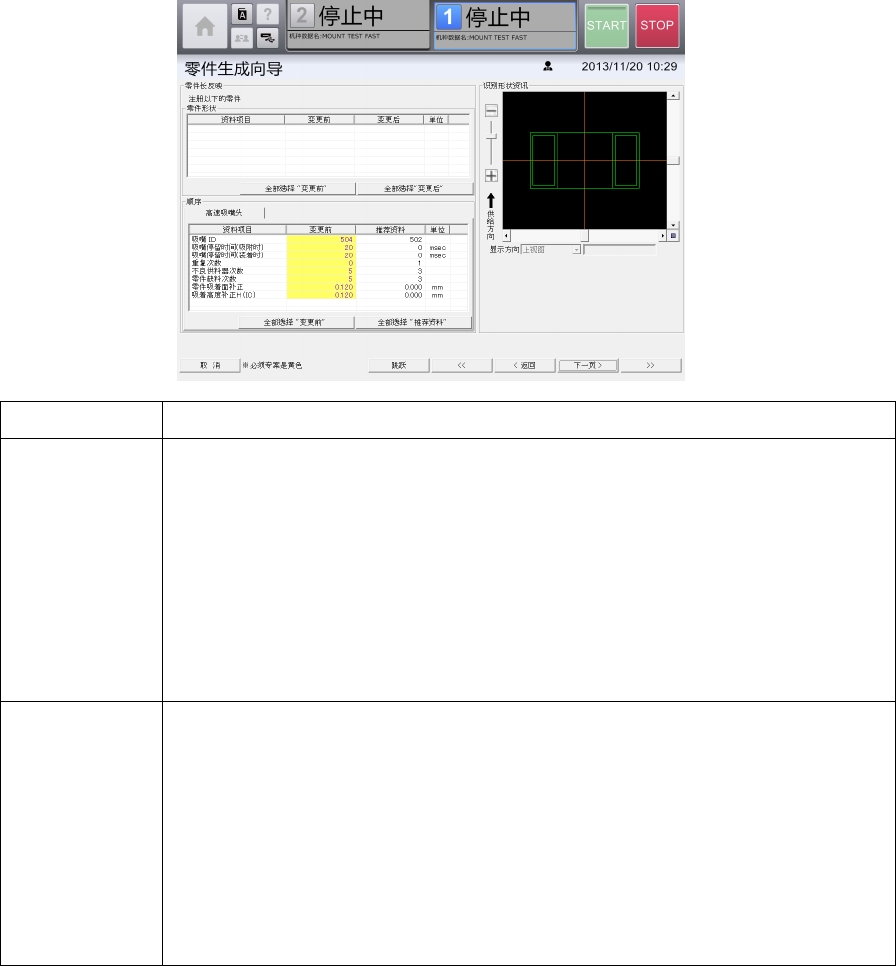
零件长度反映画面
名称
说明
零件形状 注册零件的形状。
•
资料项目:显示可更改零件长度的项目。
•
变更前:显示更改零件长度前的值。
•
变更后:显示更改零件长度后的值(输入值)。
•
单位:mm
•
全部选择 "变更前":使用更改前的值作为所有零件形状的设定值。
•
全部选择"变更后":使用更改后的值作为所有零件形状的设定值。
顺序 注册序列的设定值。
•
资料项目:显示可更改序列的项目。
•
变更前:显示零件管理表格中注册的值,或吸附,废弃画面中输入的值。
•
推荐资料:显示生成运动数据时的推荐值。
•
单位:msec
•
全部选择 "变更前":使用更改前的值作为所有序列的设定值。
•
全部选择 "推荐资料":使用推荐数据的值作为所有序列的设定值。
244