JUKI-RX-7使用说明书.pdf - 第403页
第 4 章 操作篇 4- 15. 示教 4 焊盘示教的操作 开始操作前,在 主菜单中按[ 生产助理] - [ 安装调整]的顺序触摸 ,先打开安装 调整画面。 1 在共用面板上触摸选择对象装置。 2 触摸 F/R ,选择对象轨道。 3 触摸[基板操作]。 显示 [基板操作]对话框。 有关 [基板操作]对话框的详 情,请参阅“ 4-6- 5. 零件 安装确认”的“基板 操作对话框的 操 作”。 4 根据所使用的装置,触摸[搬入]或[交付]。…
第 4 章 操作篇
4-15.
示教
记号
名称
说明
(i) 移动按钮 移动相机图像上的十字标记。
在[微调动作移动]模式下将微调移动对象装置上吸嘴头的 XY 轴(相机
图像的显示中心位置)。
(j) 待机时间 触摸[连续],设定执行中的各点上相机的待机时间。
可输入 0~9.9 的值。
(k) 连续 连续显示零件的安装目标位置。
(l) 坐标值列表 显示进行示教处理前后各步骤的安装位置数据。
•
装着位置:NC 数据中零件的安装位置 (X,Y)
•
装着位置补正值:NC 数据中零件安装位置的偏移量 (X,Y)
•
焊垫中心位置:触摸[计算]后计算得到的焊盘中心位置 (X,Y)
(m)
座标取得/计
算/复原
•
座标取得:将相机图像的中心十字标记位置作为示教点中选择的示
教点坐标数据导入并保存。计算焊盘位置所需的所有坐标点的坐标
导入完成后,[计算]变为有效。导入坐标的点为 1 点时,在触摸
[座标取得]后就会进行计算,因此不显示[计算]。
•
计算:计算焊盘位置,更新坐标值列表中的中心位置。
•
复原:将示教位置的值恢复为示教前的值。
(n) 零件装着确认 为了对已示教的安装位置进行安装测试,显示[零件装着确认]对话框。
关于[零件装着确认]对话框的详情,请参阅“4-6-5. 零件安装确认”
(o) 完毕教示 保存所有示教位置的补正量,关闭焊盘示教对话框。
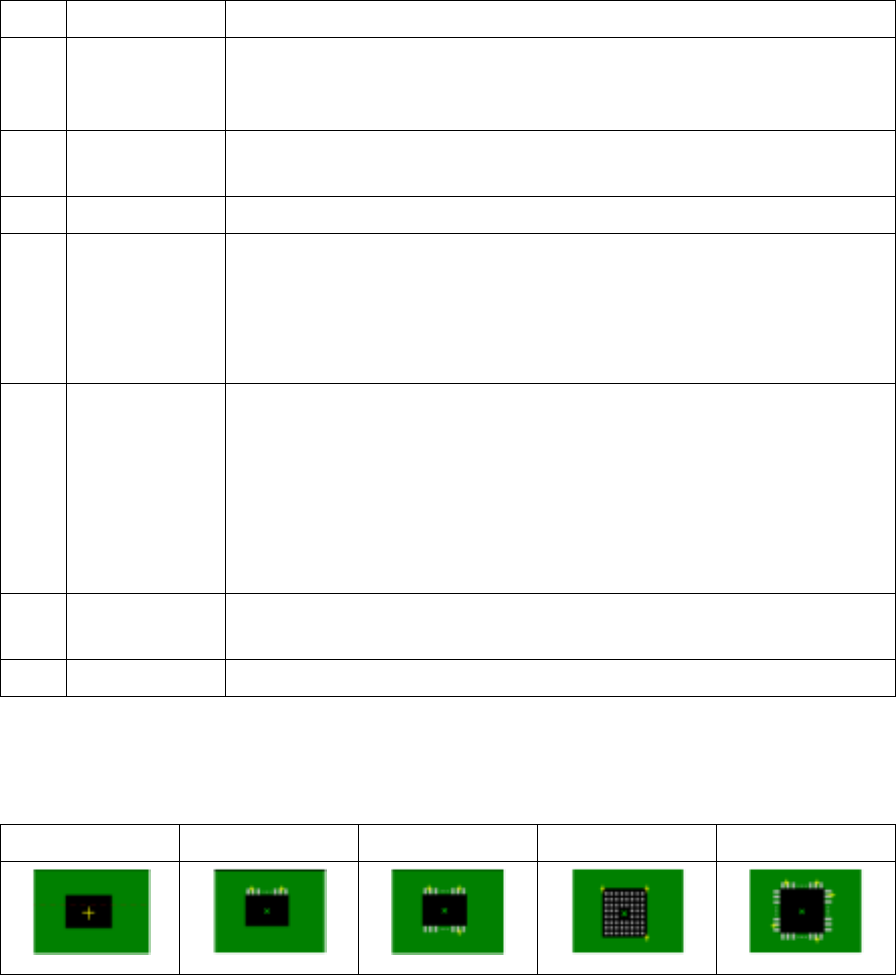
示教点的显示
示教点中将显示坐标导入目标位置的概略图,以进行手动示教。
1 点
2 点 CON
3 点 SOP
3 点 BODY
5 点 QFP
328

第 4 章 操作篇
4-15.
示教
4
焊盘示教的操作
开始操作前,在主菜单中按[生产助理] - [安装调整]的顺序触摸,先打开安装调整画面。
1
在共用面板上触摸选择对象装置。
2
触摸 F/R,选择对象轨道。
3
触摸[基板操作]。
显示[基板操作]对话框。
有关[基板操作]对话框的详情,请参阅“4-6-5. 零件安装确认”的“基板操作对话框的操
作”。
4
根据所使用的装置,触摸[搬入]或[交付]。
确定基板的位置。
5
触摸[关闭]。
关闭[基板操作]对话框,显示安装调整画面。
6
在安装调整画面中触摸[焊垫]选项卡,显示安装步骤列表。
7
从安装步骤列表中触摸选择示教对象的步骤。
8
触摸[开始教示]。
显示[焊垫教示]对话框,相机移动到安装步骤列表中所选步骤的坐标上。
9
触摸[待机时间]文本框,输入待机时间。
设定在各点上的待机时间,用于确认焊盘中心位置的坐标。
10
触摸[连续]。
相机图像将向所有焊盘的中心位置连续移动。确认与焊盘中心位置的偏移。
触摸[STOP]后中断。
11
将焊盘中心位置有偏移的步骤编号输入到[步骤]文本框中。
请触摸文本框输入,或触摸 / 选择步骤。
329
第 4 章 操作篇
4-15.
示教
12
触摸[移动至识别位置]。
13
触摸焊盘监视器的下拉列表,选择要导入坐标的点数。
14
从示教点的图中,触摸选择要进行示教的坐标位置。
相机将移动到示教对象的焊盘中心位置,并显示红色十字标记。
如果该点已经导入了坐标,则会在相机图像的坐标导入完成位置上显示绿色的固定十字标记。
15
将十字标记移动到焊盘的示教点(坐标导入位置)上并调整。
相机图像中有焊盘的示教点时进行十字标记操作,其他情况下进行微调移动。
16
触摸[座标取得]。
将更新焊盘的中心位置坐标。
进行 2 点以上目标位置的示教时,重复步骤 14 到 16,导入第 2 点之后的坐标位置,触摸
[计算],将更新焊盘的中心位置坐标值。
17
重复步骤 9 到 16,导入所有有偏移的焊盘中心位置。
18
触摸[待机时间]文本框,输入待机时间。
设定在各点上的待机时间,用于确认焊盘中心位置的坐标。
19
触摸[连续]。
相机图像将向所有焊盘的中心位置连续移动。确认与焊盘中心位置的偏移。
触摸[STOP]后中断。
20
触摸[保存并结束]。
关闭保存示教结果的[焊垫教示]对话框,显示安装调整画面。
330