NXT 机械手册.pdf - 第100页
4. 传感器配置图 QD029-26 80 NXT 机械手册 ※上述地址未显 示在 「I/O Monitor」 上。 No. 地址 信号名 传感器名 1 IN02 料盘有无确认 - 2 I N 0 3 夹 紧O N确 认 - 3 IN04 夹紧 OFF 确 认 - 4 IN05 正面门关闭确 认 - 5 IN06 料盘托架门关 闭确认 - 6 IN07 供应预约 SW 输入 - 7 IN10 供应结束 SW 输入 - 8 IN11 TZ…
QD029-26 4. 传感器配置图
NXT 机械手册 79
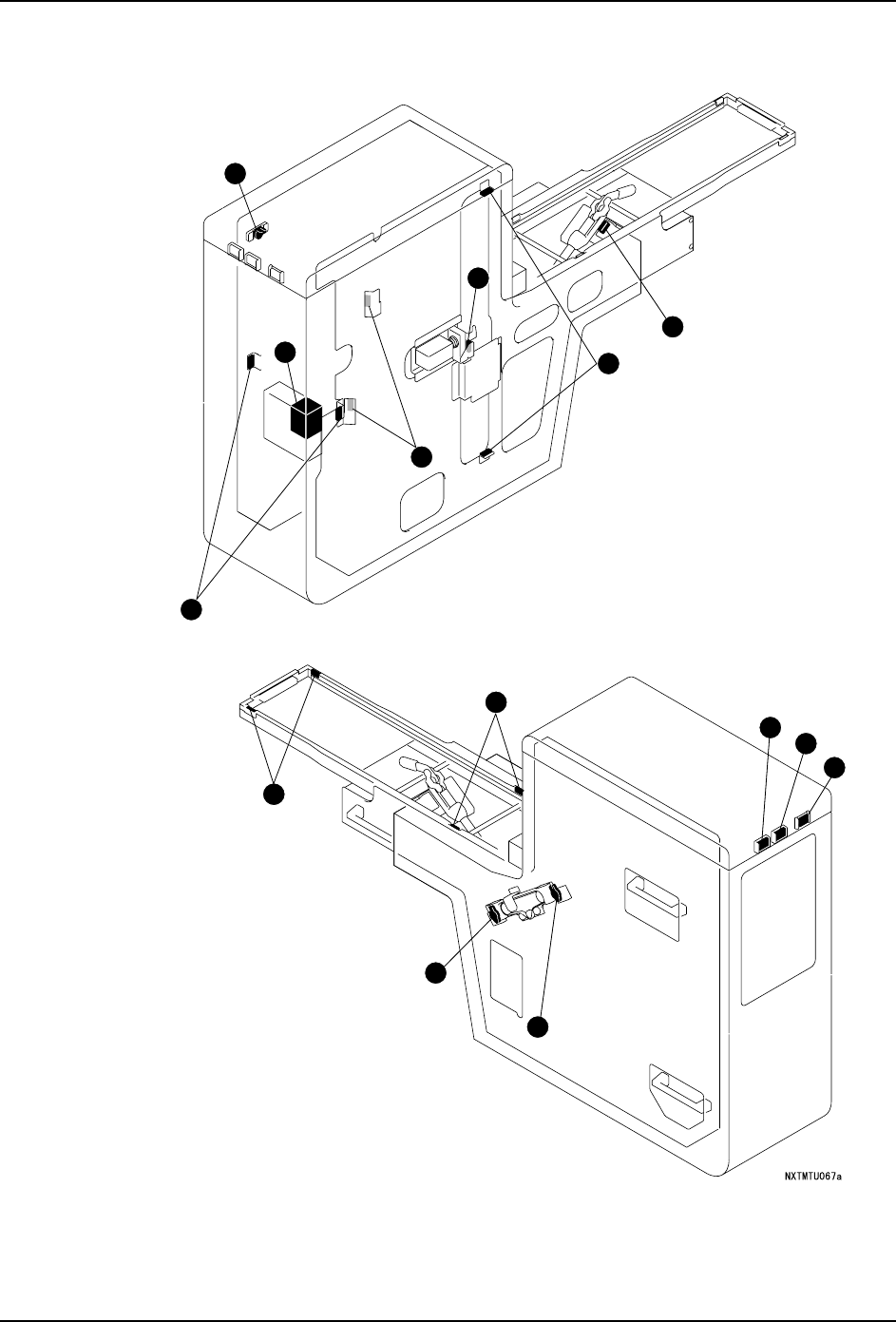
4.14 料盘单元 -M 传感器
9
8
5
7
1
2
3
4
6
13
10
11
12
14
4. 传感器配置图 QD029-26
80 NXT 机械手册
※上述地址未显示在 「I/O Monitor」上。
No. 地址 信号名 传感器名
1 IN02 料盘有无确认 -
2 IN03 夹紧ON确认 -
3 IN04 夹紧 OFF 确认 -
4 IN05 正面门关闭确认 -
5 IN06 料盘托架门关闭确认 -
6 IN07 供应预约 SW 输入 -
7 IN10 供应结束 SW 输入 -
8 IN11 TZ 轴干涉确认 -
9 IN12 料盘阻停块 ON 确认 -
10 IN13 更换预约 SW 输入 -
11 IN14 料盘前进 / 后退减速确认 -
12 IN15 料盘前进停止确认 -
13 IN16 料盘后退确认 -
14 - 单元夹紧确认 -
QD029-26 5. 基本操作
NXT 机械手册 81
5. 基本操作
5.1 模组的拉出 / 插入
为了访问模组内的各个机器装置,可以使模组处于半拉出的状态。可以方便地进行贴装工作
头、吸嘴置放台等的更换操作、模组的内部清扫·加油等操作。
备注 )在进行双模组生产时的 2 个模组是始终连接在一起的。请在 2 个模组处于连接的状态
下进行操作。
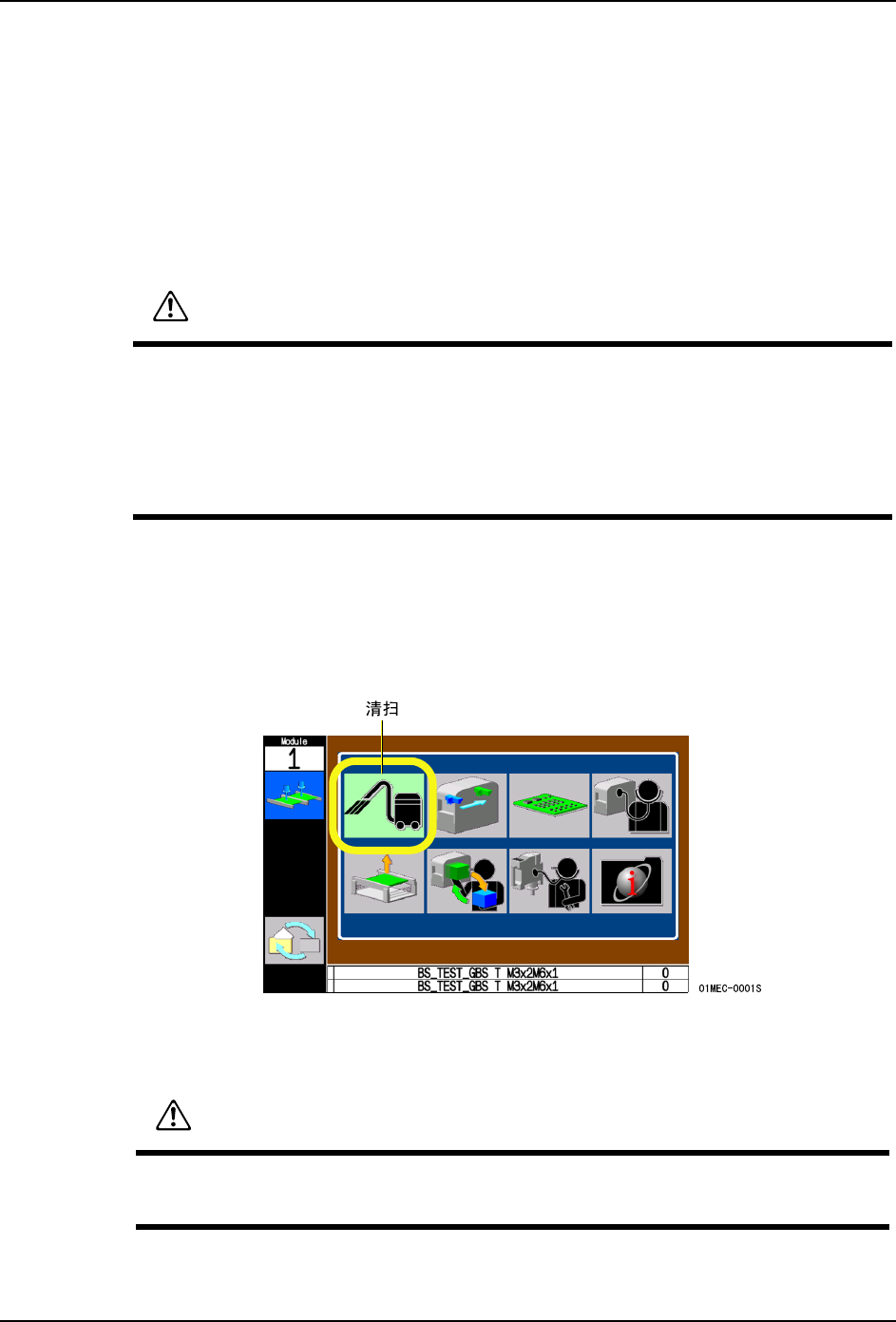
5.1.1 拉出方法
1. 停止模组的运转、使其处于 START 等待状态。
2. 按下操作面板的 「MANUAL」按钮,显示出手动指令。
3. 按下光标键,选择清扫示意图。
4. 在确认模组前侧是否有障碍物以后按下 「OK」按钮。夹板被解除后,模组自动向前移动
一些距离。
备注 )·模组没有被松开时,请依据所显示的信息调查原因。
·在 M3(S) 模组上,可以考虑是 XS 轴的位置不正确 ( 进入相邻的模组内 ) 等原因。
注意
料盘单元 -LT 安装在机器上的状态下不能进行模组的拉出 / 插入。有可能使机器损伤。
请在卸下料盘单元 -LT 的状态下进行模组的拉出 / 插入。
在料盘单元 -M、料盘供料器、部件排出搬运轨道安装的状态下,进行拉出 / 插入模组
的时候,请慢慢地移动,操作后请确认元件的状态。有元件偏移或从料盘飞出的可能
性。
注意
按下 「OK」按钮后,模组主体会向己方前进几厘米。请注意不要碰到身体或其他障碍
物。