NXT 机械手册.pdf - 第103页
QD029-26 5. 基本操作 NXT 机械手册 83 5.2 模组的拆除 / 安装 在拆除 / 安装时使用 MCU( 模组更换 台车 )。 5.2.1 操作准备 在拆除模组时,请进行以下的操 作。 拆除前盖板 请拆除模组前面的盖板。 备注 )如果在安装有模组前面下部盖板的状态下进行拉出模组的操作时,盖板会碰到 MCU 损 伤。 拆除料斗型料站托架 料站托架是料斗型时,请将其拆 除。 (详细请参考 " 5.4 料站托架的拆除…
5. 基本操作 QD029-26
82 NXT 机械手册
5. 请握住模组的手柄,慢慢地将模组拉出到阻停块的位置。
备注 )在把进行双模组生产的模组拉出时,双模组的另一个模组也同时拉出。
5.1.2 插入方法
1. 使模组处于 START 等待状态。
2. M3(S) 模组的时候,在插入模组前,请确认 XS 轴等机械部分是否从模组凸出来。在凸出
时,请将其退让到模组内。
备注 )XY 机械手后侧并列有 3 个传感器,请将 XS 轴移动到其中2个传感器 ( 中央和另 1 个传
感器 ) 同时处于 ON 位置为止。
3. 请握住模组的手柄,慢慢地推入模组,使其插入到碰到为止。
4. 模组自动地拉入并被锁定。不能自动地被锁定时,请将模组稍微拉回后一些。重新压入。
备注 )如果显示出错误信息,请参考附加软件中的错误说明。
警告
在将几台模组处于半拉出状态时,可以拉出的模组台数有限制。( 在 8M 基座上 M3(S)
模组到 4 台为止、4M 基座上 M3(S) 模组到 2 台为止。)
超过限制台数将模组拉出时,机器全体会向前倾斜,有可能造成身体受伤。
注意
请不要将手放入到模组侧面的侧盖板和基座的空隙中。拉出模组时,有可能夹住手
指。
在拉出 / 插入模组时,请不要强烈地拉出和压入,碰到停止块。请慢慢地移动。因为
有可能造成机器安装位置的移动。
警告
在拉出 / 插入模组时,请不要把手指放入相邻的模组之间。有可能手指夹入模组之间而
被切断。
注意
在拉出 / 插入模组时,请不要强烈地拉出和压入,碰到停止块。请慢慢地移动。因为
有可能造成机器安装位置的移动。
QD029-26 5. 基本操作
NXT 机械手册 83
5.2 模组的拆除 / 安装
在拆除 / 安装时使用 MCU( 模组更换台车 )。
5.2.1 操作准备
在拆除模组时,请进行以下的操作。
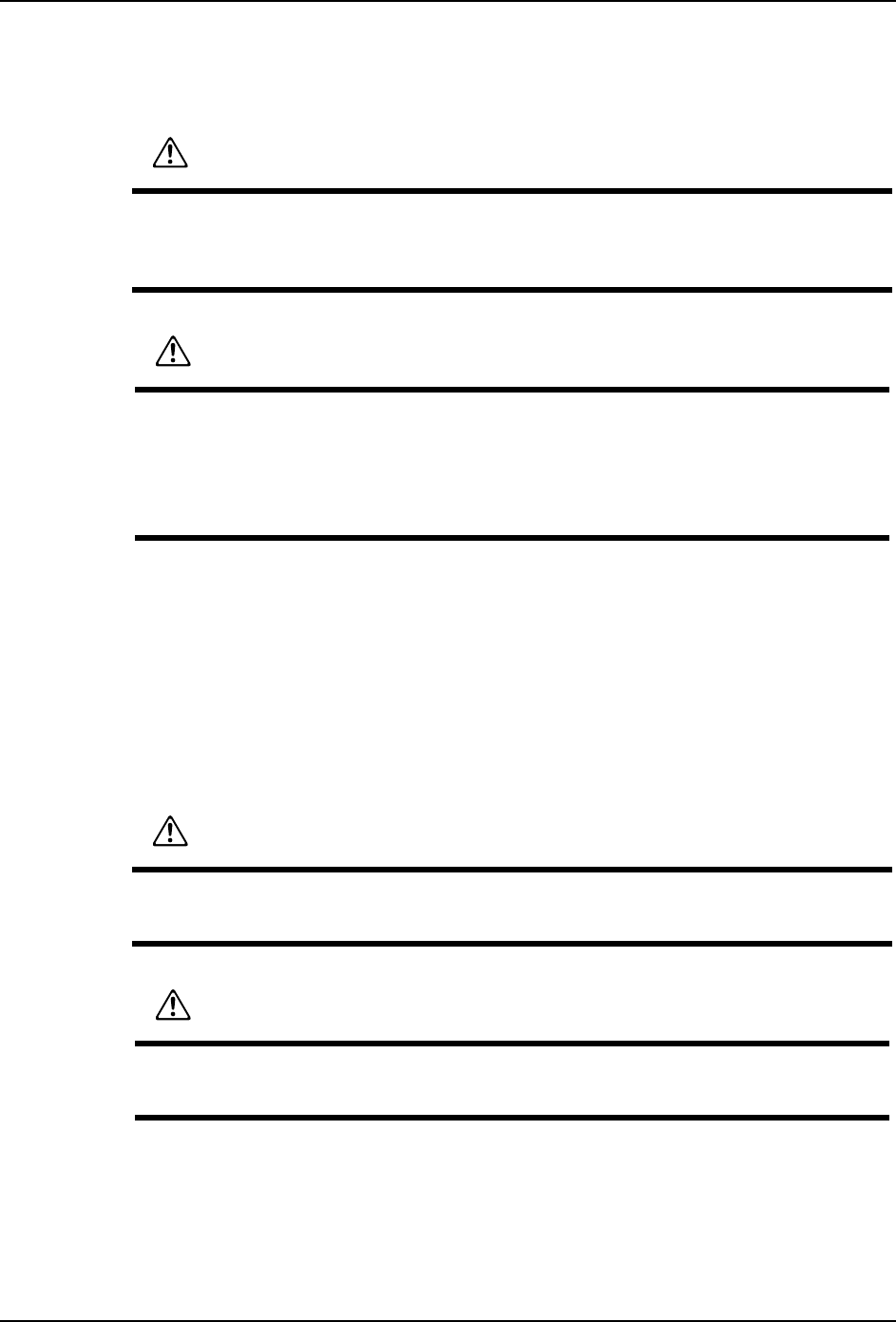
拆除前盖板
请拆除模组前面的盖板。
备注 )如果在安装有模组前面下部盖板的状态下进行拉出模组的操作时,盖板会碰到 MCU 损
伤。
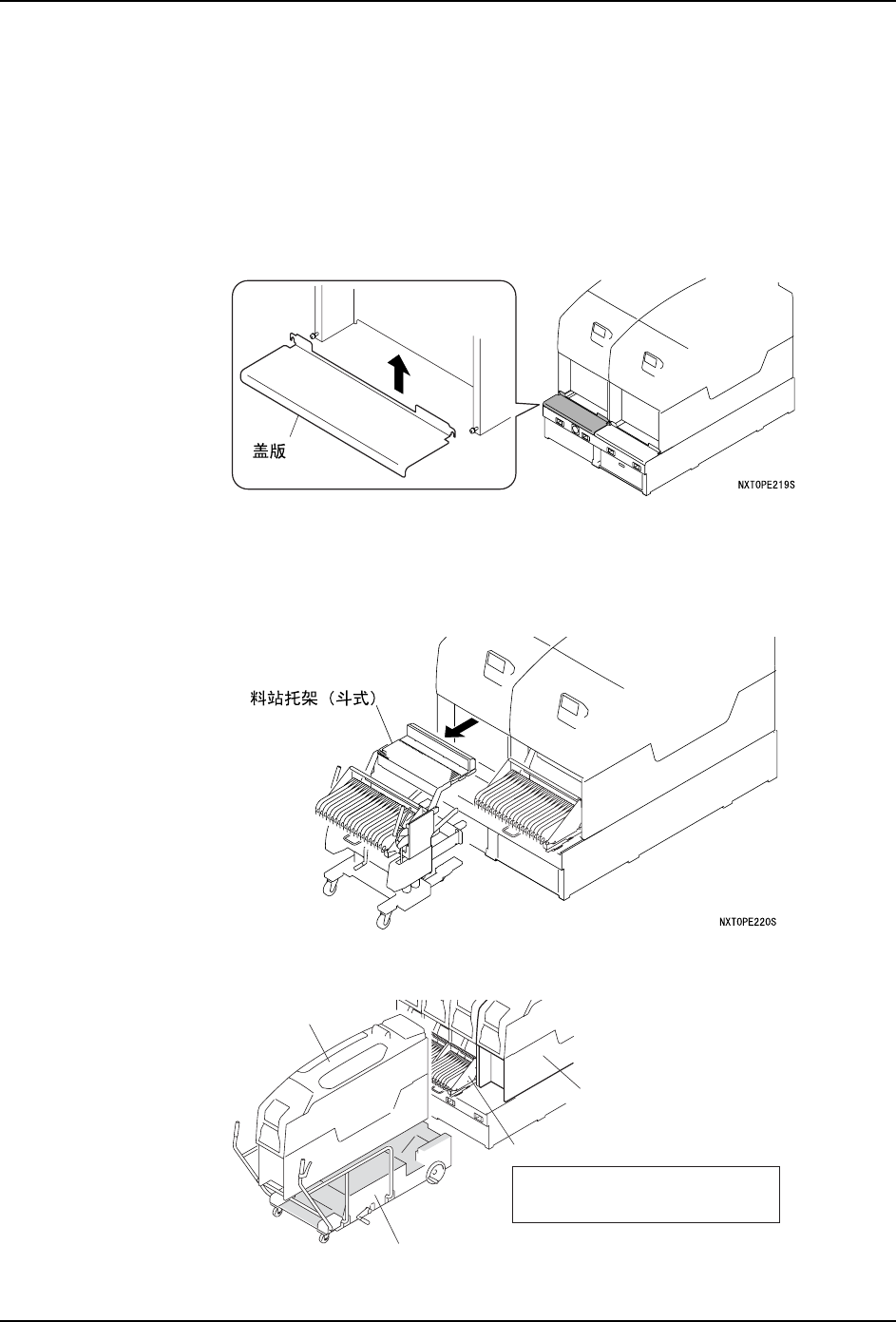
拆除料斗型料站托架
料站托架是料斗型时,请将其拆除。(详细请参考 " 5.4 料站托架的拆除 / 安装 "。)
备注 )在使用的 MCU 上已经搭载有一台 M3(S) 模组时,如果要拆除另外一台时,有必要将相
邻模组上安装的料站托架也拆除。
NXTOPE221Sa
Ⳍ䚏㒘ⱘ᭭キᠬᶊ㧔᭫ᓣ㧕
ЎӮϢ0&8ᑆ⍝ˈ
᳝ᖙ㽕џࠡᢚ䰸ޕ
䖯㸠ᢚ䰸ⱘᇍ䈵06㒘
0&8㧔㒘ᤶৄ䔺㧕
06㒘
5. 基本操作 QD029-26
84 NXT 机械手册
拆除料盘单元 -L/LT
如果搭载了料盘单元 -L/LT 时,请将其拆除。(详细请参考 " 5.5 料盘单元 -L 的拆除 / 安
装 "" 5.6 料盘单元 -LT 的拆除 / 安装 "。)
备注 )请将对象模组两侧的料盘单元 -L/LT 也拆除。因为 MCU 会与料盘单元 -L/LT 干涉。
解除双模组生产模式
双模组生产模式的时候,请将其拆除。(详细请参考 「NXT 系统手册」。)
5.2.2 从模组的基座上的拆除方法
1. 停止模组
停止模组的运转、使其处于 START 等待状态。
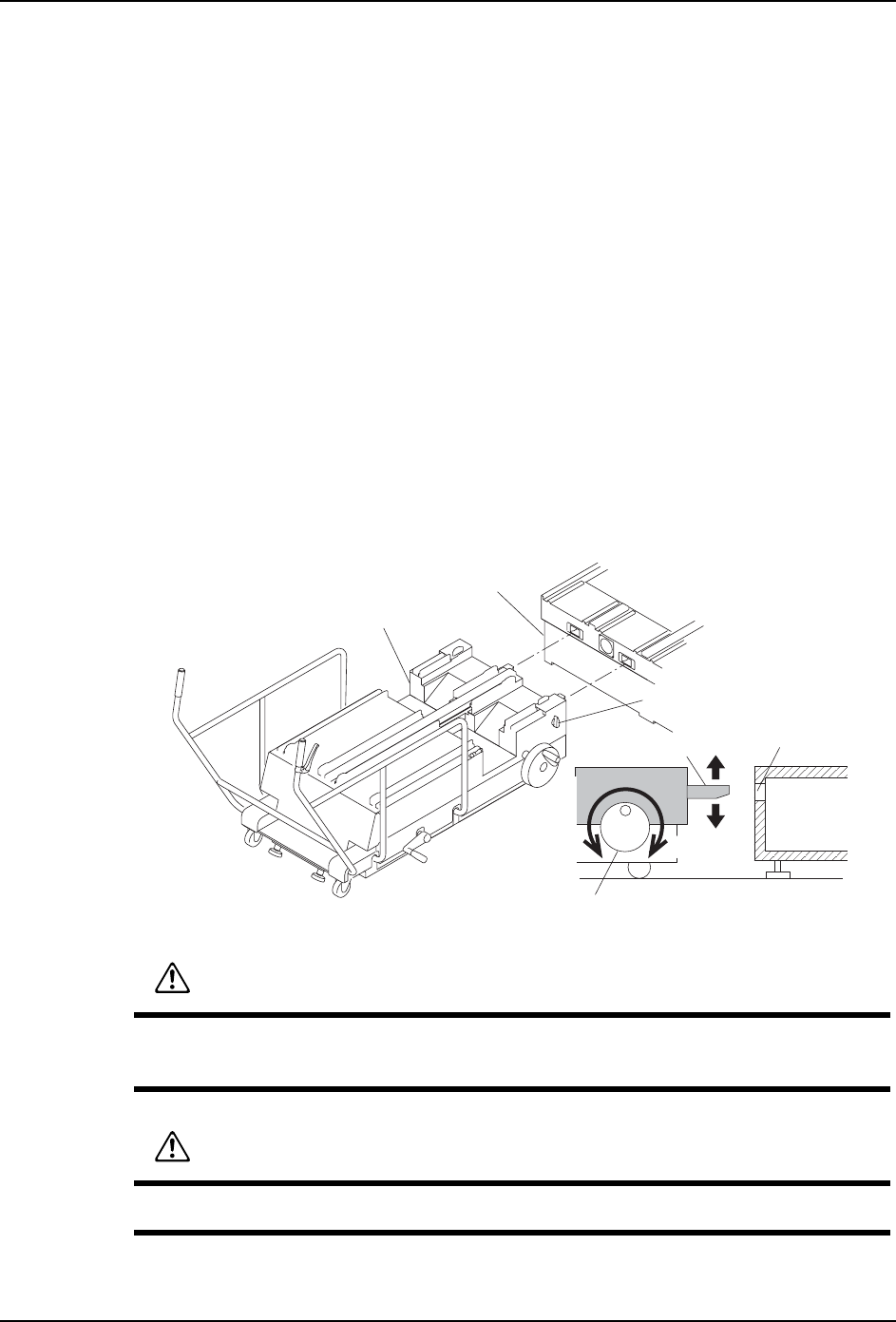
2. 将空的 MCU 结合到基座上
a. 将空的 MCU 配置到基座前面。
b. 旋转摇手柄、调节高度以使 MCU 的定位头对准基座的孔。
c. 慢慢地按下 MCU、将定位头插入基座的孔中。然后把 MCU 压在基座上,锁定 MCU 定位
头。( 听到嘎嗒声的同时基座上的模组阻停块降低。)
备注 )插入时,请确认 MCU 的锁定旋钮是否处于 「LOCK」位置。
䫕ᅮᮟ䪂
NXTOPE001Sb
0&8˄㒘Ѹᤶบ䔺˅
ᑻ
ᑻⱘᄨ
ᅮԡ༈
ᨛᶘ
ϟ䰡
Ϟछ
警告
在进行 MCU 的连接操作时 , 请确认 MCU 和基座间没有别的操作人员。在 MCU 与基座间
存在身体被夹住,压死的危险。
注意
使用 MCU 时 , 请注意不要被车子的边角和伸出部所撞伤。