RV-2_使用说明书.pdf - 第335页
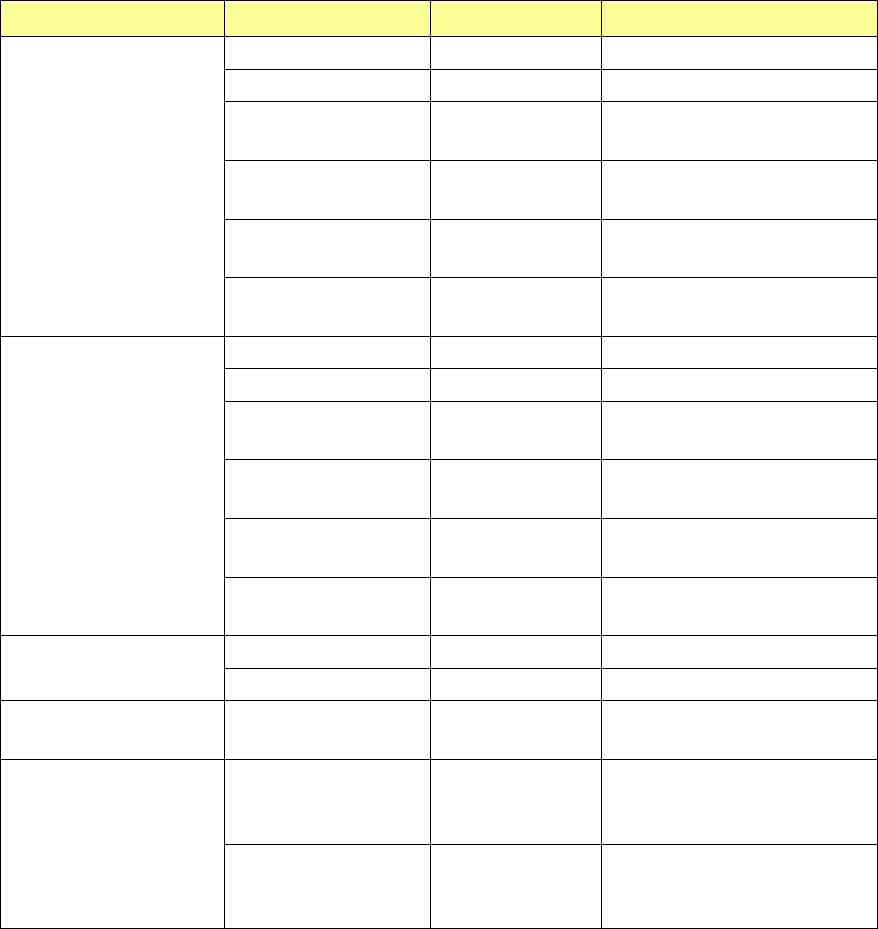
第 4 章 操作 篇 4- 8. 维护 255 4 分类 详细 ・ 单位 初始值 输入范围 ・ 项目 返回原点时的 速度 设定 速度 X[mm/s] 20 1 ~ 999 (整数) 速度 Y[mm/s] 20 1 ~ 999 (整数) 加速度 X[m/s 2 ] 1.000 0.000 ~ 99.999 (小数点以下 3 位) 加速度 Y[m/s 2 ] 1.000 0.000 ~ 99.999 (小数点以下 3 位) 减速度 X[m/…
第 4 章 操作篇
4-8. 维护
254
分类
详细,单位
初始值
输入范围,项目
微动中速移动时的速度
设定
速度
X [mm/s]
5
1
至
999
(整数)
速度
Y [mm/s]
5
1
至
999
(整数)
加速度
X [m/s
2
]
1.000
0.000
至
99.999
(小数点后
3
位)
加速度
Y [m/s
2
]
1.000
0.000
至
99.999
(小数点后
3
位)
减速度
X [m/s
2
]
1.000
0.000
至
99.999
(小数点后
3
位)
减速度
Y [m/s
2
]
1.000
0.000
至
99.999
(小数点后
3
位)
微动低速移动时的速度
设定
速度
X [mm/s]
1
1
至
999
(整数)
速度
Y [mm/s]
1
1
至
999
(整数)
加速度
X [m/s
2
]
1.000
0.000
至
99.999
(小数点后
3
位)
加速度
Y [m/s
2
]
1.000
0.000
至
99.999
(小数点后
3
位)
减速度
X [m/s
2
]
1.000
0.000
至
99.999
(小数点后
3
位)
减速度
Y [m/s
2
]
1.000
0.000
至
99.999
(小数点后
3
位)
加减速时的
S
形比率
X
轴
[%]
100
0
至
100
(整数)
Y
轴
[%]
100
0
至
100
(整数)
超时
轴移动超时
[s]
60.000
-999.999
至
999.999
(小数点后
3
位)
释放基板时的退避位置
X [mm]
250.000
软件极限偏移(补正)下限
X
至上限
X
(小数点后
3
位)
Y [mm]
300.000
软件极限偏移(补正)下限
X
至上限
Y
(小数点后
3
位)
第 4 章 操作篇
4-8. 维护
255
4
分类
详细
・
单位
初始值
输入范围
・
项目
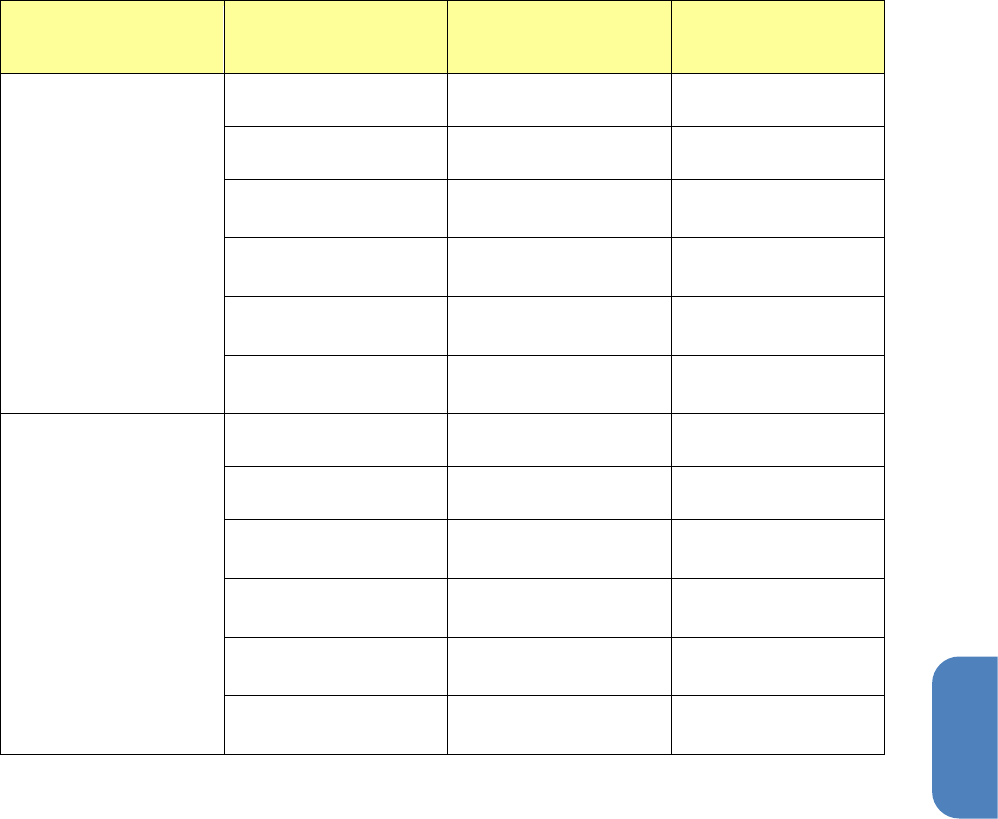
返回原点时的速度设定
速度
X[mm/s]
20
1
~
999
(整数)
速度
Y[mm/s]
20
1
~
999
(整数)
加速度
X[m/s
2
]
1.000
0.000
~
99.999
(小数点以下
3
位)
加速度
Y[m/s
2
]
1.000
0.000
~
99.999
(小数点以下
3
位)
减速度
X[m/s
2
]
1.000
0.000
~
99.999
(小数点以下
3
位)
减速度
Y[m/s
2
]
1.000
0.000
~
99.999
(小数点以下
3
位)
基板搜索时的速度设定
速度
X[mm/s]
400
1
~
999
(整数)
速度
Y[mm/s]
400
1
~
999
(整数)
加速度
X[m/s
2
]
10.000
0.000
~
99.999
(小数点以下
3
位)
加速度
Y[m/s
2
]
7.500
0.000
~
99.999
(小数点以下
3
位)
减速度
X[m/s
2
]
10.000
0.000
~
99.999
(小数点以下
3
位)
减速度
Y[m/s
2
]
7.500
0.000
~
99.999
(小数点以下
3
位)
第 4 章 操作篇
4-8. 维护
256
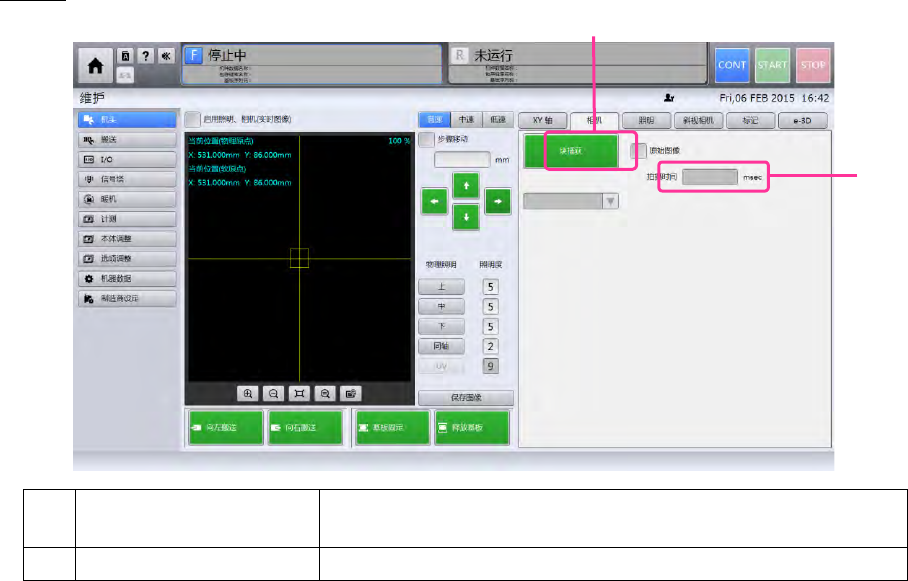
摄像机
(a)
块捕获
触摸按钮后,可以选择通用画面的物理照明以及利用照明级别拍
摄块区图像,获取拍摄时间后显示在[拍摄时间]文本框中。
(b)
拍摄时间
指定拍摄时间。
b
a