RV-2_使用说明书.pdf - 第342页
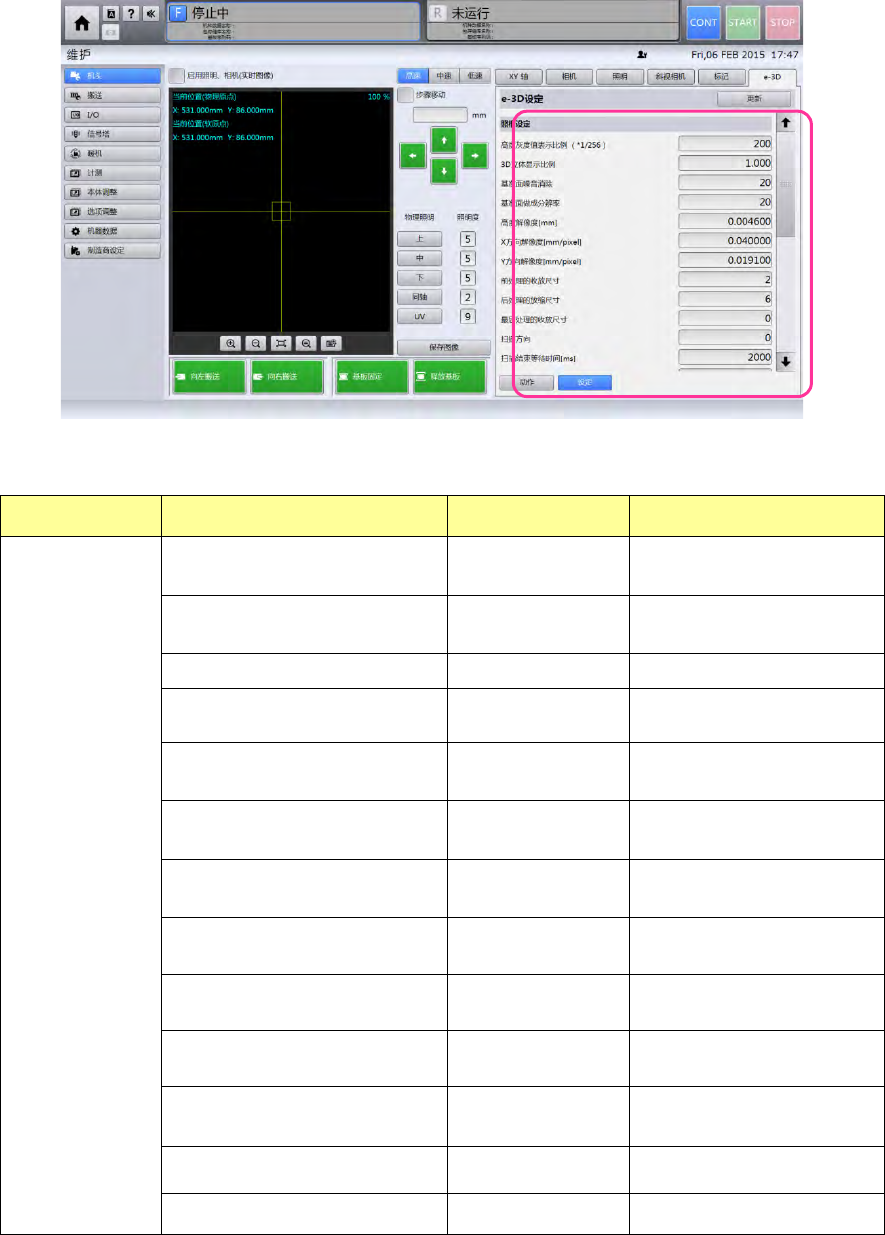
第 4 章 操作 篇 4- 8. 维护 262 设定 分类 详细 ・ 单位 初始值 输入范围 ・ 项目 照相设定 高度灰度(亮度)值表 示 比例 ( *1/256 ) 200 0 ~ 999( 整数 ) 3D 立体显示比例 1.000 0.000 ~ 99.99 9 ( 小数点以下 3 位 ) 基准面噪音消除 20 0 ~ 999( 整数 ) 基准面 做成 分辨率 20 0 ~ 999( 整数 ) 高度解像(析像)度 [mm] 0.…
第 4 章 操作篇
4-8. 维护
261
4
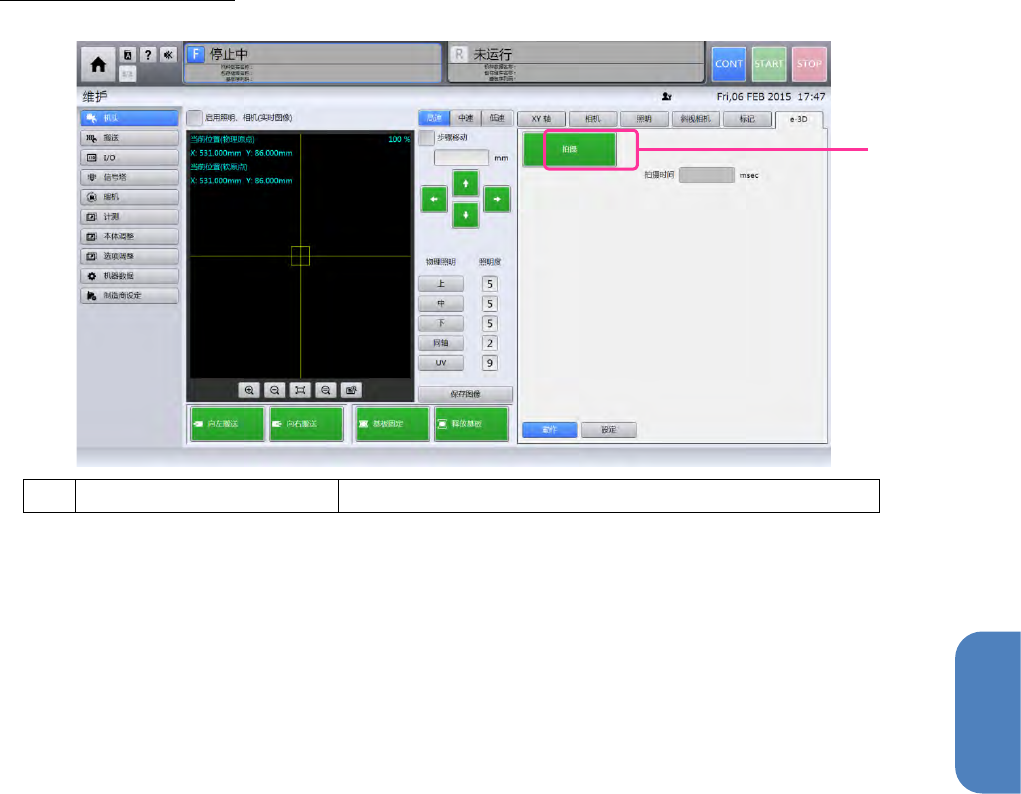
e-3D
(
RV-2
专用选配)
(a)
拍照
通过
e-3D
单元进行图像取得
a
第 4 章 操作篇
4-8. 维护
262
设定
分类
详细
・
单位
初始值
输入范围
・
项目
照相设定
高度灰度(亮度)值表示比例
(
*1/256
)
200
0
~
999(
整数
)
3D
立体显示比例
1.000
0.000
~
99.999
(
小数点以下
3
位
)
基准面噪音消除
20
0
~
999(
整数
)
基准面做成分辨率
20
0
~
999(
整数
)
高度解像(析像)度
[mm]
0.004600
0.000000
~
999.000000
(
小数点以下
6
位
)
X
方向解像(析像)度(析
像)
[mm/pixel]
0.040000
0.000000
~
999.000000
(
小数点以下
6
位
)
Y
方向解像(析像)度
[mm/pixel]
0.019100
0.000000
~
999.000000
(
小数点以下
6
位
)
前处理的收放尺寸
2
0
~
999(
整数
)
后处理的收放尺寸
6
0
~
999(
整数
)
最后处理的收放尺寸
0
0
~
999(
整数
)
扫描方向
0
0
~
999(
整数
)
扫描结束等待时间
[ms]
2000
0
~
9999(
整数
)
扫描开始等待时间
[ms]
0
0
~
9999(
整数
)
第 4 章 操作篇
4-8. 维护
263
4
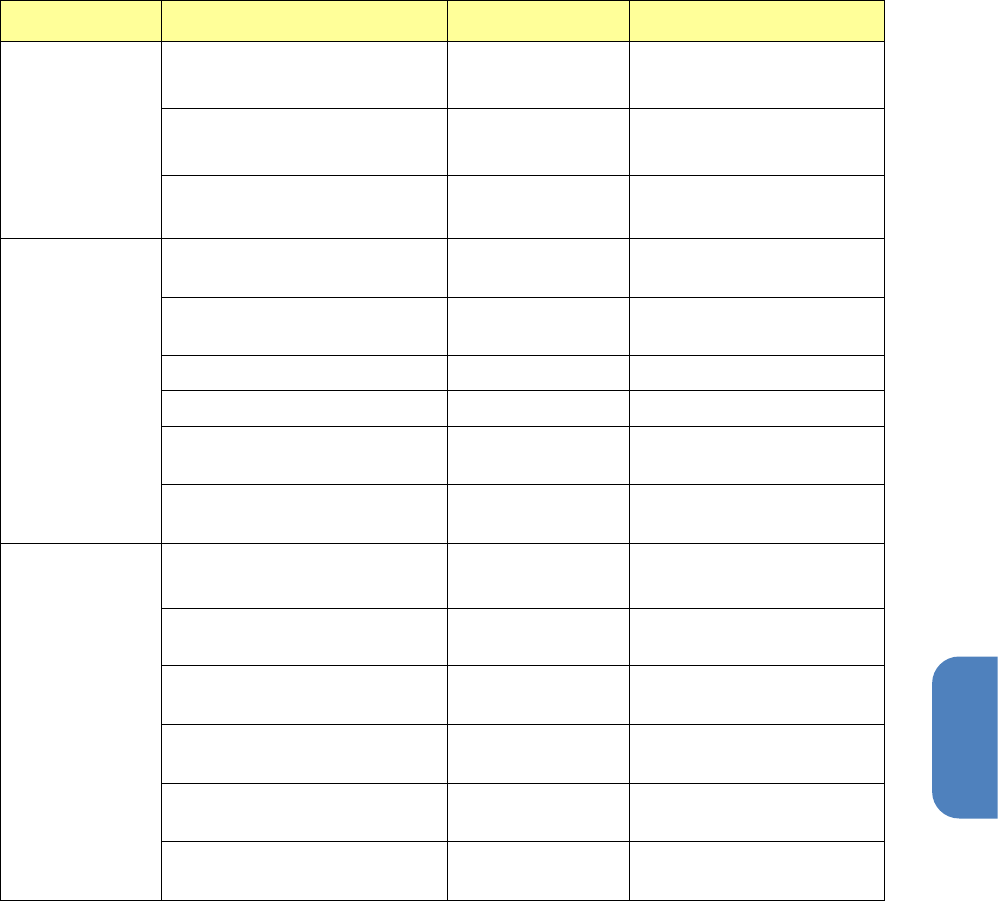
分类
详细
・
单位
初始值
输入范围
・
项目
IP
地址
169.254.10.1
激光测量阈值
10
0
~
255
(整数)
扫描结束后立即搬出
0
0
~
999
(整数)
偏移设定
激光头的角度偏移值(补正
值)
[mm]
0
0
~
999
(整数)
反向扫描偏移(补正值)
[mm]
0.000
0.000
~
999.000
(
小数点以下
3
位
)
前轨的基板停止位置
[mm]
0
0
~
999(
整数
)
后轨的基板停止位置
[mm]
0
0
~
999(
整数
)
X
偏移(补正值)
[mm]
-10.000
0.000
~
999.000
(
小数点以下
3
位
)
Y
偏移(补正值)
[mm]
175.000
0.000
~
999.000
(
小数点以下
3
位
)
速度设定
X
速度
[mm/s]
110
1
~
999(
整数
)
Y
速度
[mm/s]
110
1
~
999(
整数
)
X
加速度
[m/s
2
]
10.000
0.000
~
99.999
(
小数点以下
3
位
)
Y
加速度
[m/s
2
]
15.000
0.000
~
99.999
(
小数点以下
3
位
)
X
减速度
[m/s
2
]
10.000
0.000
~
99.999
(
小数点以下
3
位
)
Y
减速度
[m/s
2
]
15.000
0.000
~
99.999
(
小数点以下
3
位
)